 MAX14912/MAX14913八通道数字输出驱动器的特性及应用
MAX14912/MAX14913八通道数字输出驱动器的特性及应用
本应用笔记解释了MAX14912/MAX14913八通道数字输出驱动器的主要特性,以及如何在工业和楼宇自动化应用中使用它们。
介绍
数字输出驱动器广泛用于过程控制(PLC系统)和楼宇自动化的工业应用。它们还可用于使用 24V DC 系统进行控制的任何地方,例如电机控制、机器人和机械自动化。
乍一看,数字输出驱动器是一个简单的器件,只有两种输出状态:ON或OFF。经过仔细观察,设计人员成功地取代了机械开关和继电器,为工程师提供了许多优势,如稳健运行、低功耗、简单、更小尺寸、灵活性和可编程性,以构建自动化、容错控制系统。
Maxim的数字输出驱动器具有高达200kHz的开关速率、快速安全的电感负载退磁、开路负载、低压和欠压检测、过流和过热保护、看门狗定时器和SPI错误检测。它们可承受高达 60V 的功率尖峰,不受 ±1kV 浪涌脉冲和高达 12kV ESD 冲击的影响,工作温度范围为 -40°C 至 +125°C。
在本应用笔记中,我们将讨论如何有效利用MAX14912/MAX14913输出驱动器的不同特性。为此,我们研究了系统设计人员必须做出的决策,并研究了MAX14912/MAX14913提供的利弊和优势。
确定系统运行条件
高端 (HS) 还是推拉 (PP)?
通常推挽操作用于高速通信,其中信号波形应具有锋利的边缘。这种模式的缺点是输出始终处于工作状态,无论是高电平还是低电平,并且不能是三态或具有高阻抗,除非使用全局EN引脚。
相反,高端操作允许工程师将输出置于高阻抗状态,但信号波形在很大程度上取决于负载阻抗。输出也可以并联连接,允许在高边模式下高达 9.6A 的更大负载。
因此,操作模式的选择取决于特定的应用。
电源要求
MAX14912/MAX14913支持12V至36V的宽范围电源,可用于广泛的应用,甚至适用于电源要求较低且容限较高的系统。这保证了系统设计的稳健性和灵活性。
集成的 5V DC-DC 转换器消除了额外的电源轨,最大限度地减少了外部组件的数量,并提高了系统效率。系统中的其他器件可以由该 5V 直流电源供电,可为外部电路提供超过 100mA 的电流。
系统集成
数字输出驱动器是低压MCU/FPGA与相对高压(12V至36V)外围设备(如执行器、电机、灯、继电器、LED等)之间的接口。它们对电压和电流尖峰、电感或容性负载以及磁干扰和静电放电具有很高的抗扰度。
此外,MAX14912/MAX14913提供广泛的诊断功能,包括热关断、开路检测、低电源和欠压检测以及过压和过流保护。4 × 4 LED 驱动器交叉矩阵允许每个通道指示输出状态和故障条件。
数字接口
MAX14912和MAX14913支持两个接口;并行和串行。系统设计人员可以灵活地使用并行或串行接口来控制操作,也可以同时使用这两个接口。为了理解接口,我们首先回顾一些全局配置引脚。
全局配置引脚
EN – 将此引脚驱动为高电平,使器件能够正常工作;将该引脚驱动为低电平将禁用任何输出操作,即使所有输出均为高阻抗。
SRIAL – 将该引脚驱动至高电平可实现串行 (SPI) 操作;将该引脚驱动为低电平可实现并联操作。
PUSHPUL – 将此引脚驱动到高处,可实现推挽式操作模式;将该引脚驱动为低电平或保持未连接状态会导致所有输出引脚在高端模式下工作。
FLTR – 当此引脚设置为高电平时,所有并行逻辑输入和CS引脚上的毛刺滤波均使能。
并行接口
并行接口是基于引脚的简单接口,用于控制驱动器输出。如果 SRIAL 引脚接地(SRIAL = 低电平),则通过并行接口控制器件。OUT_引脚的状态由相应的IN_引脚和全局配置引脚的状态控制:PUSHPL、FLTR 和 EN。在并行模式下控制MAX14912/MAX14913至少需要9个GPIO引脚:控制8个输入引脚IN_和PUSHPL引脚。FLTR和EN引脚可以始终保持高电平。引脚设置汇总于表1中。
| 普什普尔 | 驱动程序模式 | 在_ | OUT_状态 |
|---|---|---|---|
| 0 | 高边 | 0 | 高边驱动器关断/高阻抗 |
| 0 | 高边 | 1 | 高边驱动器导通/输出高电平 |
| 1 | 推挽式的 | 0 | 输出低 |
| 1 | 推挽式的 | 1 | 输出高 |
注意:MAX14913不允许在并行模式下进行串行配置,而MAX14912可以通过串行接口进行配置,即使SRIAL为低电平。除寄存器 0 外,所有寄存器都可以在此模式下访问(请参阅下面的串行接口部分)。
通过串行接口进行配置的优先级高于 PUSHPL 引脚设置。逻辑电平0(低)或1(高)取决于VL输入,VL输入的有效范围为1.6V至5.5V。 并行模式的缺点是缺乏诊断信息。
串行接口
当SRIAL引脚被驱动到VL电平(SRIAL =高电平)时,串行SPI接口使能。在串行模式下,所有输出引脚均由内部寄存器设置和输入引脚控制。寄存器可通过串行接口引脚访问:CS、CLK、SDI 和 SDO。详情请参考MAX14912/MAX14913数据资料中的串行接口部分。
循环冗余校验 (CRC)、看门狗和滤波等某些功能仅由 CRC/IN3、WDEN/IN5 和 FLTR 引脚上的输入逻辑控制,而开路负载检测和输出配置则由 OL/IN1 和 PUSHPL 引脚上的输入逻辑或通过寄存器设置控制。
此外,CMND/IN2、CNFG/IN7 和 S16/IN8 的设置总结在表 2 中。
| 针 | 结果 | |||||||
|---|---|---|---|---|---|---|---|---|
| SPI 模式 | 斯里亚尔 | CMND/IN2 | CNFG/IN7 | S16/IN8 | 位 | 空间数据指数 | 性别歧视条例 | 笔记 |
 |
1 | 0 | 1 | 0 | 8 | 每通道故障 | 由SPI设置。故障是故障的实时状态(驱动程序关闭或打开负载) | |
| 1 | 16 | 每个通道的故障和电平 | ||||||
| 1 | 0 | 1 | 0 | 8 | 每通道故障 | OUT 级别不变 | ||
| 1 | 16 | 每个通道的故障和电平 | ||||||
 |
1 | 1 | X | X | 16 | 上一个命令输出 | OUT 级别可能会也可能不会根据命令而更改 | |
| 0 | X | X | X | 16 | 上一个命令输出 | 输出由 INx 引脚设置。MAX14912允许SPI配置。MAX14913不允许SPI配置。 | ||
直接模式
在直接SPI模式下,不需要命令字节。高字节控制输出电平,低字节控制 16 位模式下的输出配置。当 CNFG/IN7 和 S16/IN8 设置为低电平时,只能访问 Reg. 0。当 CNFG/IN7 和 S16/IN8 设置为高电平时,只能访问 Reg. 1 和 Reg. 2。
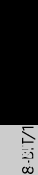
在直接模式写入期间,SDO引脚上提供故障(F)和输出电平(L)诊断(请参阅图1和表3)。
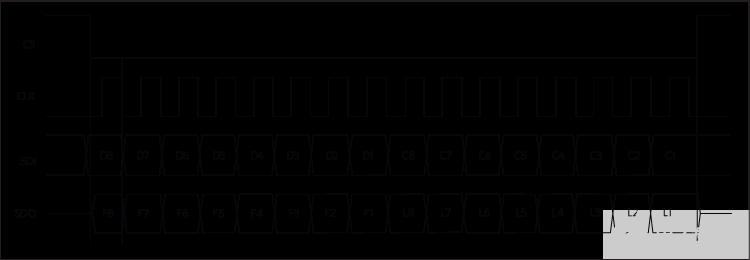
图1.16 位直接 SPI 模式下的 SPI 周期。
| 位 | 位值 | CNFG/IN7 | 定义 |
| D_ | 0 | 低 |
在高边模式下:HS 关闭,LS 关闭 在推挽模式下:HS 关闭 ,LS 打开 |
| 1 | 低 | 低 HS 开启,LS 关闭 | |
| C_ | 0 | 低 | 高边模式 |
| 1 | 低 | 推挽模式 | |
| D_C- | 00 | 高 | 高边模式;由 OL/IN1 引脚定义的开路负载检测 |
| 01 | 高 | 带负载开路检测的高边模式 | |
| 10 | 高 | 推挽模式 | |
| 11 | 高 | 未使用 | |
| 00 | 低 | 高边模式:HS 关闭,LS 关闭 | |
| 10 | 低 | 高边模式:HS 开启,LS 关闭 | |
| 01 | 低 | 推挽模式:HS 关闭,LS 打开 | |
| 11 | 低 | 推挽模式:HS 开启,LS 关闭 | |
| F_ | 0 | X | 无过错 |
| 1 | X | 故障状态(热保护或开路负载) | |
| L_ | 0 | 0 | 输出电平 < 7V |
| 1 | 0 | 输出电平 > 7V | |
| 0 | 1 | 慢速模式已禁用 | |
| 1 | 1 | 慢速模式已禁用 |
综上所述,
当 S16/IN8 = 低电平且 CNFG/IN7 = 低电平时,一个字节的串行数据控制OUT_状态;当 S16/IN8 = 低电平且 CNFG/IN7 = 高电平时,一个字节的串行数据控制输出模式:高边或推挽。
当 S16/IN8 = 高电平和 CNFG/IN7 = 低电平时,两个字节的串行数据控制OUT_状态和输出模式配置:高端或推挽。
当 S16/IN8 = 高电平且 CNFG/IN7 = 高电平时,第一个字节设置输出配置(高边/推挽),第二个字节启用/禁用负载开路检测。
建议先设置配置寄存器,然后再更新输出电平。
注意:返回的F_(故障)和L_(级别)信息适用于上一个编写的命令。写入两次以获得实时故障和电平诊断。当驱动器处于高边模式并启用负载开路检测时,空载的OUT_引脚被75μA电流拉高至VDD电平。在这种情况下,将确定故障条件。
命令模式
在命令模式下,所有功能和增强诊断均可通过SPI接口获得。 要设置命令模式,CNMD/IN2引脚必须设置为高电平。S16/IN8 和 CNFG/IN7 引脚的输入将被忽略。该命令包含命令字节,后跟数据字节。总共有六种可用的命令类型(有关命令说明,请参阅表 4,有关寄存器映射,请参阅表 5)。有关更多信息,请参阅数据手册。
| 命令# | 功能 | 地 | 做 | 评论 | |||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 命令 | 数据 | 在下一个周期有效 | |||||||||||||||||||||||||||||||||||||||
| 0 |
|
||||||||||||||||||||||||||||||||||||||||
| 注意: 所有故障寄存器只能通过在任何命令周期中设置 Z = 1 来清除。 | |||||||||||||||||||||||||||||||||||||||||
| 注册 | R/W | 目的 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|
| 0 | R/W | 驱动程序设置 | HNY | IN7 | IN6 | HNT | IN4 | IN3 | HNS | IN2 |
| 1 | R/W | 推挽式/高边配置 | PP8 | PP7 | PP6 | PP5 | PP4 | PP3 | PP2 | PP1 |
| 2 | R/W | R/W 开路负载检测使能 | OL_EN8 | OL_EN7 | OL_EN6 | OL_EN5 | OL_EN4 | OL_EN3 | OL_EN2 | OL_EN1 |
| 3 | R/W | 看门狗配置。和通道并联 | X | X | X | 短路脉冲关闭 | Short-circuit Pulse OFF | joinUP | joinDW | WD1 |
| 4 | R | 每通道开负载条件 | 蓝队 | 布莱兹 | OL6 | OL5 | OL4 | OL3 | OL2 | OL1 |
| 5 | R | 每通道热关断 | THSD8 | THSD7 | THSD6 | THSD5 | THSD4 | THSD3 | THSD2 | THSD1 |
| 6 | R | 全局故障 | WD故障 | CRC故障 |
直流直流 电流限制 |
8CLKmult Error | THSDglob | 5V 紫外线 | 电压输出 乌洛 | 电压输出 警告 |
| 7 | R | OUT 过压检测或慢速模式 | OV8 | OV7 | OV6 | OV5 | OV4 | OV3 | OV2 | OV1 |
通信错误(CRC 检测)
循环冗余校验 (CRC) 是一种错误检测功能,可提高通信可靠性并避免意外执行意外命令。最初,SPI协议没有任何错误检测功能,串行数据在恶劣的工业环境中可能会损坏。启用CRC检测后(SRIAL=高电平,CRC/IN3 =高电平),来自SPI主机的所有命令后必须后跟一个带有7位CRC代码的附加字节,如图2所示。
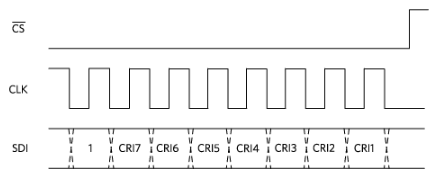
图2.微控制器的SDI检查字节。
7 位 CRC 码,也称为 CRC 帧校验序列 (FCS),是根据生成器多项式 (x7+ x5+ x4+ x2+ x + 1)。MAX14900E中也使用了相同的多项式。有关CRC计算的C代码实现的更多信息和示例,请参考应用笔记6002:“MAX14900E八通道高速工业开关的CRC编程”。
安装MAX14912或MAX14913时,器件检查接收到的数据是否有位损坏,如果未检测到错误,则执行命令。如果从微控制器接收的CRC代码与计算出的CRC不匹配,则忽略该命令,并在寄存器6中设置CRC误差位6。CRC错误在下一个SPI帧上报告给主机微控制器。
CRC计算器内置于MAX14912EVKIT软件中。如果CRC/IN3引脚被驱动为高电平,CRC字节会自动计算并添加到SPI命令帧中。如果从“选项”菜单中选择了“显示状态日志”选项,则可以在“状态日志”窗口中看到它。
图3.数字输出驱动器 GUI 中的 CRC 计算。
CRC代码可以在CRC计算器弹出窗口中手动计算。转到“帮助”菜单,然后单击CRC计算器以显示它。键入字节 1 和字节 2 的值,然后单击计算 CRC 按钮,如图 4 所示。
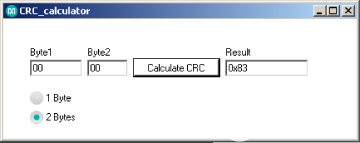
图4.CRC计算器弹出窗口。
多个IC的菊花链
MAX14912和MAX14913允许以菊花链方式连接多个器件,并通过单个命令模式同时控制/监视同一SPI总线上的所有器件。所有设备都使用通用的CLK和CS信号;链中第一个器件的SDI引脚连接到主器件的MOSI引脚,最后一个器件的SDO连接到主器件的MISO引脚。第一个器件的数据输出(SDO)连接到第二个器件的数据输入(SDI),如图5所示。其他设备可以以类似的方式菊花链连接。
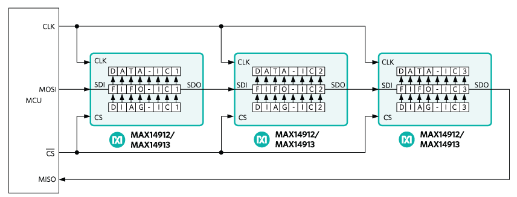
图5.菊花链连接。
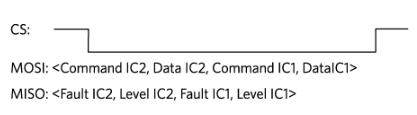
MAX14912/MAX14913EVKIT允许两个评估板以菊花链方式连接,但相同的命令结构适用于三个或更多器件。
例如,16 位命令模式下两个菊花链设备的命令帧。
评估板应堆叠,使以下器件的J24接头(EVKIT #2)连接到评估板#1的J23,如图6所示。USB电缆或外部主站应连接至评估板#1。此外,EVKIT #1的J26跳线必须位于位置2至3,但EVKIT #2的J26跳线应位于位置1至2。评估板#2的J9、J5、J4、J22、J10、J6、J12、JMP1、J11、JMP2、J8和J3上的跳线必须手动设置为与GUI中相同的位置。更多信息请参考MAX14912/MAX14913数据资料和原理图。
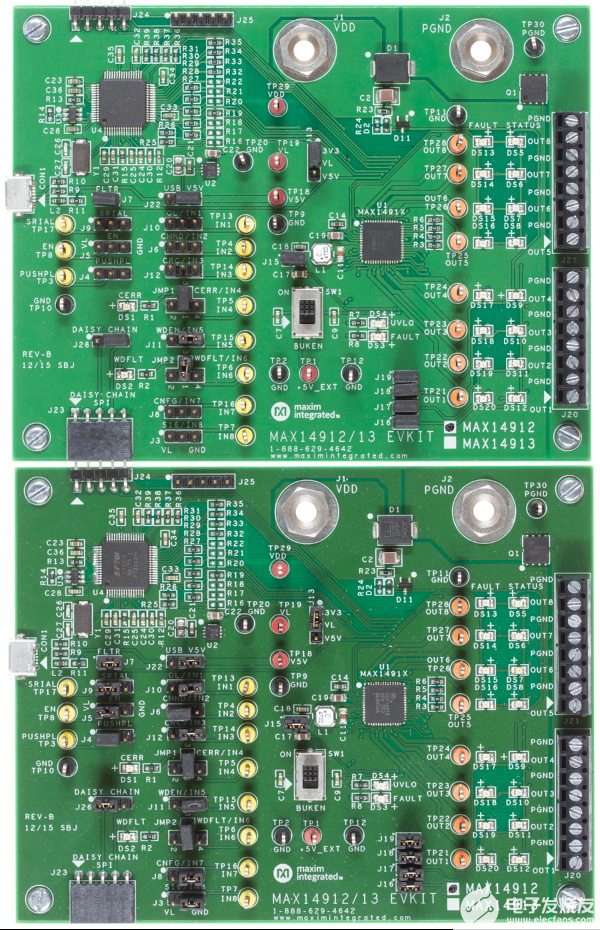
图6.菊花链式MAX14912评估板
应如图7所示选择菊花链盒。
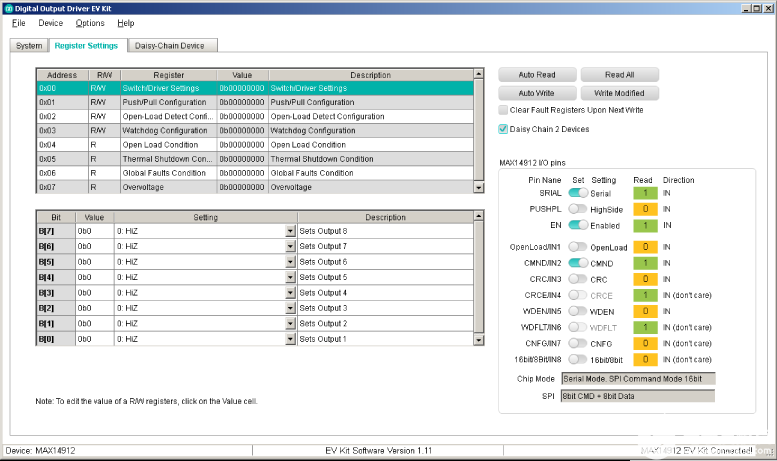
图7.菊花链操作。
菊花链的能力不仅限于扩展输出通道的数量,还允许与数字输出驱动器和数字输入接收器组合构建更复杂的系统,例如八通道数字输入转换器/串行器系列MAX31910/MAX31913。
驱动感性负载
MAX14912和MAX14913具有感性负载的安全退磁(SafeDemag),可防止在高端模式下关断感性负载时产生的反冲电压损坏芯片。如果需要驱动大电感,例如执行器、继电器或电机,当电流从芯片流经负载流向地面时,感性负载中会存储大量能量。当电流因高端开关关闭而终止时,该能量在OUT_引脚上转换为负尖峰。尖峰由内部齐纳二极管箝位至(VDD- 56V)。例如,如果 VDD= 24V,则OUT_引脚相对于地箝位至-32V。在这种情况下,存储在感性负载中的能量消散得更快,因为能量与|成正比V x I|.然而,耗散更大的能量需要更多的时间。在此期间,芯片的温度可以达到安全阈值。为了防止危险的热失控,低侧开关被激活,允许更少的能量耗散,直到内部温度达到安全区域。
结论
Maxim的高集成度数字输出驱动器系列为系统设计人员提供了极大的鲁棒性、灵活性和特性。它们是为任何工业自动化和通信应用构建高度集成和高效控制系统的关键要素。
审核编辑:郭婷
-
继电器
+关注
关注
132文章
5332浏览量
148810 -
驱动器
+关注
关注
52文章
8226浏览量
146251 -
电机
+关注
关注
142文章
9000浏览量
145337
发布评论请先 登录
相关推荐
数字输出驱动器的关键特性和挑战
【每日推荐】用了这么久放大器,特性及阻抗你都了解吗?
八通道高压发送器接收器开关MAX4937电子资料
八通道超声前端与CW多普勒混频器MAX2078电子资料
MAX2077中文资料,八通道超声接收器
MAX2078 八通道超声前端,提供CW多普勒混频器
MAX1436B 八通道、12位模数转换器(ADC)







 工商网监
工商网监
评论