 ORB-SLAM3与ORB-SLAM2相比有哪些优势呢?
ORB-SLAM3与ORB-SLAM2相比有哪些优势呢?

01 背景介绍
自主导航是机器人基础性和关键性技术,是机器人实现其他更高级任务的前提。视觉 SLAM (Simultaneous Localization And Mapping) 利用视觉传感器获取环境图像信息,基于多视图几何算法构建环境地图。视觉SLAM技术广泛应用于无人驾驶、元宇宙、游戏、智能机器人等领域。
在无人驾驶方面,一些大厂如腾讯、阿里、百度、华为、小米、商汤等企业投入重金研发,开放大量关于视觉SLAM职位。同时,国内许多独角兽无人驾驶公司如Momenta、AutoX、小马智能和图森未来等举重金招募视觉SLAM人才。随着元宇宙的火爆,国内互联网巨头尤其字节跳动,纷纷将大量资金投入元宇宙,致使视觉SLAM人才进一步稀缺,引发视觉SLAM更高的薪酬与福利。
02 ORB-SLAM3介绍
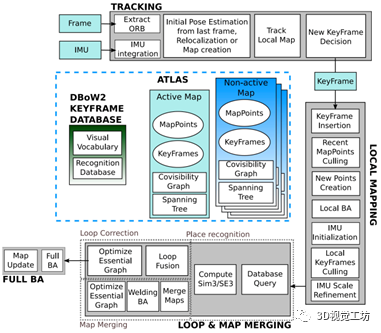
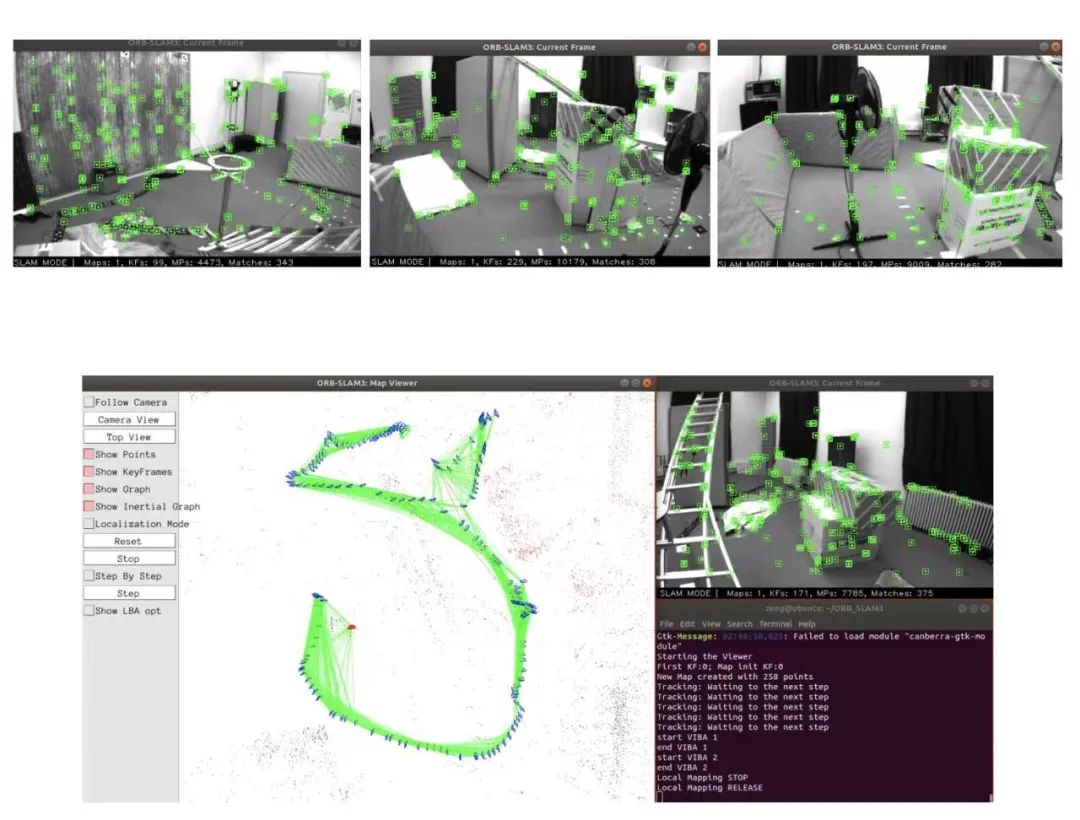
视觉SLAM是一种基于视觉传感器的 SLAM 系统,与激光传感器相比,视觉传感器具有成本低、保留环境语义信息的优点,能够与深度学习进行大量结合。ORB-SLAM系列算法是视觉SLAM中具有最广泛关注与应用的算法。ORB-SLAM3是一个支持视觉、视觉+惯导、混合地图的SLAM系统,可以在单目、双目和RGB-D相机上利用针孔或者鱼眼模型运行。在大场景/小场景、室内/室外,ORB-SLAM3都能鲁棒地实时运行,被广泛应用于商业化产品中。
03 学习难点
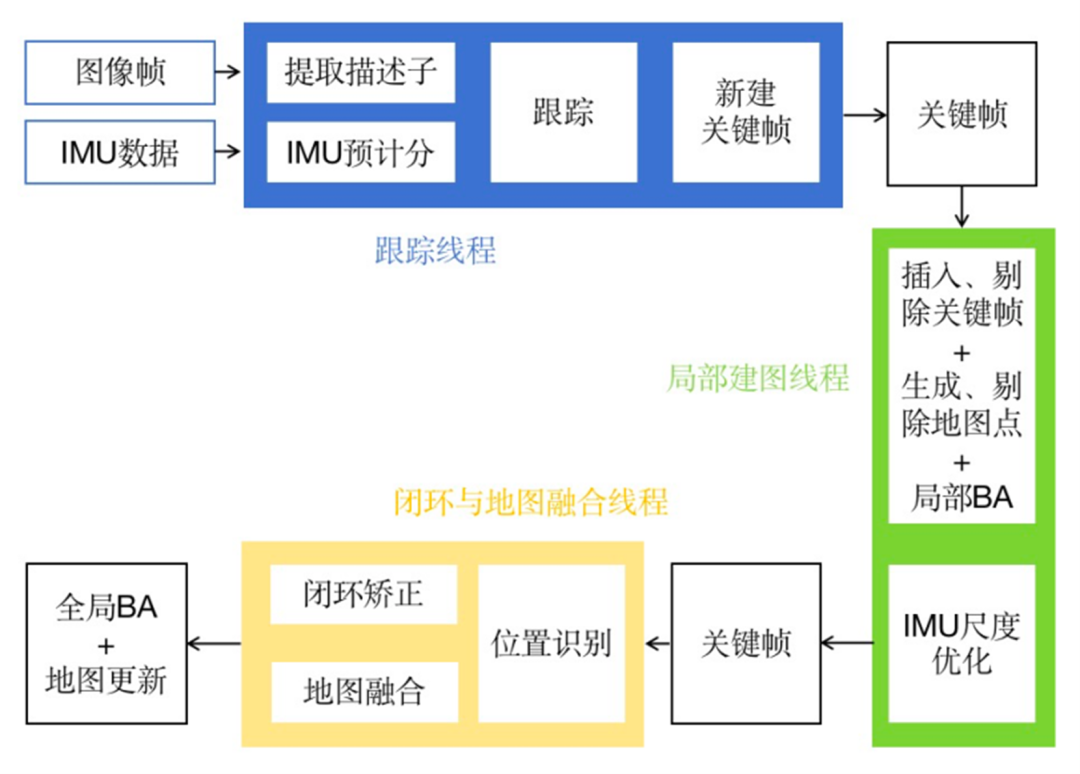
在学习ORB-SLAM3过程中,需要掌握算法部署、主要线程之间的逻辑关系,吃透ORB-SLAM3算法原理和底层代码。主要难点包括:深入理解关键帧、共视图、因子图等重要概念;掌握IMU预积分的推导过程,以及局部建图线程、闭环与地图合并线程之间的算法逻辑等!
审核编辑:刘清
-
智能机器人
+关注
关注
18文章
922浏览量
85996 -
SLAM
+关注
关注
24文章
459浏览量
33416 -
激光传感器
+关注
关注
2文章
172浏览量
22568 -
orb
+关注
关注
0文章
21浏览量
10210
原文标题:ORB-SLAM3相对于ORB-SLAM2有哪些优势?
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
ORB_FPGA单层图像金字塔的ORB特征提取方案分析
请问用树莓派运行ORB-SLAM2算法可行吗?
激光SLAM与视觉SLAM有什么区别?
机器人SLAM实现
SLAM还是存在许多开放性的问题

ORB SLAM中涉及的一些基础概念
基于视觉传感器的ORB-SLAM系统的学习
OV2SLAM(高速视觉slam)简析
ORB-SLAM3整体流程详解

基于英特尔开发套件使用ORB-SLAM3实现无人机实时定位
工程实践中VINS与ORB-SLAM的优劣分析

基于多摄像头的高鲁棒性视觉SLAM系统设计
基于深度学习的增强版ORB-SLAM3详解




评论