1/**
2 * @file FreeRTOSConfig.h
3 *
4 * http://www.FreeRTOS.org
5 * http://aws.amazon.com/freertos
6 *
7 */89#ifndef FREERTOS_CONFIG_H10#define FREERTOS_CONFIG_H1112/*-----------------------------------------------------------
13 * Application specific definitions.
14 *
15 * These definitions should be adjusted for your particular hardware and
16 * application requirements.
17 *
18 * These parameters and more are described within the 'configuration' section of the
19 * FreeRTOS API documentation available on the FreeRTOS.org web site.
20 *
21 * See http://www.freertos.org/a00110.html
22 *----------------------------------------------------------*/2324/* USER CODE BEGIN Includes */25/* Section where include file can be added */26/* USER CODE END Includes */2728/* Ensure definitions are only used by the compiler, and not by the assembler. */29#if defined(__ICCARM__) || defined(__CC_ARM) || defined(__GNUC__)30#include31#endif32#define configENABLE_FPU 033#define configENABLE_MPU 03435#define configUSE_PREEMPTION 136#define configSUPPORT_STATIC_ALLOCATION 037#define configSUPPORT_DYNAMIC_ALLOCATION 138#define configUSE_IDLE_HOOK 039#define configUSE_TICK_HOOK 040#define configCPU_CLOCK_HZ ( ( unsigned long ) 64000000 ) 41#define configTICK_RATE_HZ ((TickType_t)1000)42#define configMAX_PRIORITIES ( 7 )43#define configMINIMAL_STACK_SIZE ((uint16_t)256)44#define configTOTAL_HEAP_SIZE ((size_t)1024*16)45#define configMAX_TASK_NAME_LEN ( 16 )46#define configUSE_16_BIT_TICKS 047#define configUSE_MUTEXES 148#define configQUEUE_REGISTRY_SIZE 849#define configUSE_PORT_OPTIMISED_TASK_SELECTION 05051/*Software timer related definitions. */52#define configUSE_TIMERS 153#define configTIMER_TASK_PRIORITY 554#define configTIMER_QUEUE_LENGTH 1055#define configTIMER_TASK_STACK_DEPTH configMINIMAL_STACK_SIZE5657/* USER CODE BEGIN MESSAGE_BUFFER_LENGTH_TYPE */58/* Defaults to size_t for backward compatibility, but can be changed
59 if lengths will always be less than the number of bytes in a size_t. */60#define configMESSAGE_BUFFER_LENGTH_TYPE size_t61/* USER CODE END MESSAGE_BUFFER_LENGTH_TYPE */6263/* Co-routine definitions. */64#define configUSE_CO_ROUTINES 065#define configMAX_CO_ROUTINE_PRIORITIES ( 2 )6667/* Set the following definitions to 1 to include the API function, or zero
68to exclude the API function. */69#define INCLUDE_vTaskPrioritySet 170#define INCLUDE_uxTaskPriorityGet 171#define INCLUDE_vTaskDelete 172#define INCLUDE_vTaskCleanUpResources 073#define INCLUDE_vTaskSuspend 174#define INCLUDE_vTaskDelayUntil 075#define INCLUDE_vTaskDelay 176#define INCLUDE_xTaskGetSchedulerState 17778/* Normal assert() semantics without relying on the provision of an assert.h
79header file. */80/* USER CODE BEGIN 1 */81//void vAssertCalled(const char *file, int line);82//#define configASSERT( x ) if( x == 0 ) { taskDISABLE_INTERRUPTS(); vAssertCalled(__FILE__,__LINE__); for(;;); }83/* USER CODE END 1 */8485/* Definitions that map the FreeRTOS port interrupt handlers to their CMSIS
86standard names. */87#define vPortSVCHandler sv_call_handler88#define xPortPendSVHandler pend_sv_handler8990/* IMPORTANT: This define is commented when used with STM32Cube firmware, when the timebase source is SysTick,
91 to prevent overwriting SysTick_Handler defined within STM32Cube HAL */9293#define xPortSysTickHandler sys_tick_handler9495/* USER CODE BEGIN Defines */96/* Section where parameter definitions can be added (for instance, to override default ones in FreeRTOS.h) */97/* USER CODE END Defines */9899#endif/* FREERTOS_CONFIG_H */
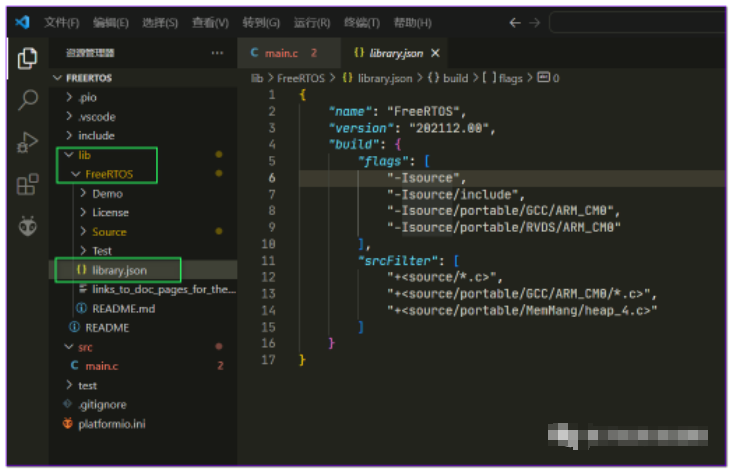
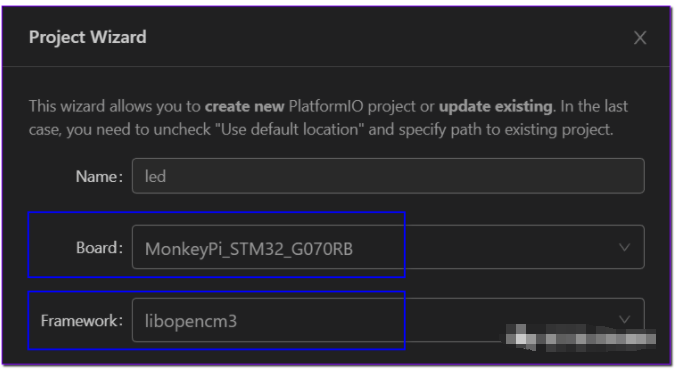
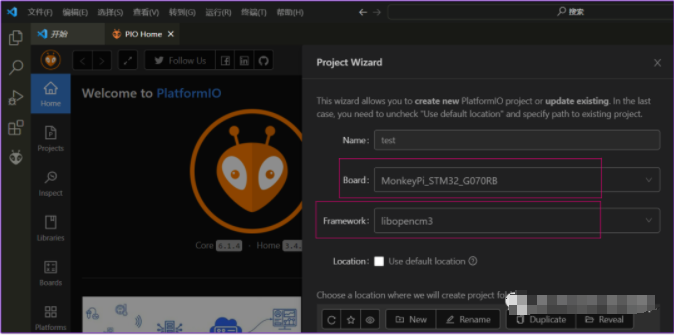
 STM32G0开发笔记:使用FreeRTOS系统
STM32G0开发笔记:使用FreeRTOS系统






评论