 USART简介及例程分析
USART简介及例程分析
7.1 USART简介
7.1.1 概述
计算机的通信分为并行通信与串行通信,串行通信根据时钟的不同又可以分为同步通信与异步通信。
USART:Universal Synchronous/Asynchronous Receiver/Transmitter,即通用同步/异步串行接收/发送器,是一个全双工通用同步/异步串行收发模块,该接口是一个高度灵活的串行通信设备,STC89C52RC单片机中集成了一路USART模块,通过这个模块可以用于给单片机下载程序,也可以用于单片机输出信号,USART模块只需要两根线就可以传输数据,即位于P3.0口的RXD和位于P3.1口的TXD。
7.1.2 USART相关参数
(1)比特速率
比特率是每秒钟传输二进制代码的位数,单位是:位/秒(bps)。如每秒钟传送240个字符,而每个字符格式包含 10位(1个起始位+1个停止位+8个数据位),这时的比特率为:10位×240个/秒=2400 bps。串行接口或终端直接传送串行信息位流的最大距离与传输速率及传输线的电气特性有关。当传输线使用每0.3m(约1英尺)有50PF电容的非平衡屏蔽双绞线时,传输距离随传输速率的增加而减小。当比特率超过1000 bps时,最大传输距离迅速下降,如9600 bps时,最大距离下降到只有76m(约250英尺)。
(2)波特率的计算
在串行通信中,收发双方对发送或接收数据的速率要有约定。通过软件可对单片机串行口编程为四种工作方式,其中方式0和方式2的波特率是固定的,而方式1和方式3的波特率是可变的,由定时器T1的溢出率来决定。
串行口的四种工作方式对应三种波特率。由于输入的移位时钟的来源不同,所以,各种方式的波特率计算公式也不相同。
方式0的波特率:fosc/12
方式2的波特率:(2SMOD/64)×fosc
方式1的波特率:(2SMOD/32)×T1溢出率
方式3的波特率:(2SMOD/32)×T1溢出率
当T1作为波特率发生器时,最典型的用法是使T1工作在自动再装入的8位定时器方式(即方式2,且TCON的TR1=1,以启动定时器)。这时溢出率取决于TH1中的计数值,即有公式
常用波特率与定时器1的参数关系如下表所示。
| 定时器1工作方式 | 波特率 |
晶振频率 (MHz) |
SMOD | 定时器T1 | ||
| C/T | 工作方式 | 定时器初值 | ||||
| 方式1或方式3 | 62.5K | 12 | 1 | 0 | 2 | 0xFF |
| 19.2K | 11.0592 | 1 | 0 | 2 | 0xFD | |
| 9600 | 11.0592 | 0 | 0 | 2 | 0xFD | |
| 4800 | 11.0592 | 0 | 0 | 2 | 0xFA | |
| 2400 | 11.0592 | 0 | 0 | 2 | 0xF4 | |
| 1200 | 11.0592 | 0 | 0 | 2 | 0xE8 | |
注:从上表可以看出来,如果要使用串行通信功能,需要将单片机的晶振换成11.0592MHz,而不能够使用12MHz,否则计算出的波特率会有误差。
7.1.3 串口的工作方式
方式0时,串口为同步移位寄存器的输入输出方式。主要用于扩展并行输入或输出口。数据由RXD引脚输入或输出,同步移位脉冲由TXD引脚输出。发送和接收均为8位数据,低位在先,高位在后。波特率固定为 fosc/12。
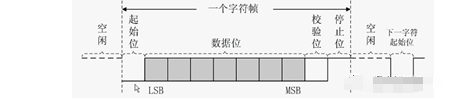
方式1时,串口为10位数据的异步通信口。TXD为数据发送引脚,RXD为数据接收引脚,传送一帧数据的格式如图所示。其中1位起始位,8位数据位,1位停止位。
用软件置REN为1时,接收器以波特率的16倍速率采样RXD引脚电平,检测到RXD引脚输入电平发生负跳变时,则说明起始位有效,将其移入输入移位寄存器,并开始接收这一帧信息的其余位。接收过程中,数据从输入移位寄存器右边移入,起始位移至输入移位寄存器最左边时,控制电路进行最后一次移位。当RI=0且SM2=0(或接收到的停止位为1)时,将接收到的9位数据的前8位数据装入接收SBUF,第9位(停止位)进入RB8,并置RI=1,向CPU请求中断。
方式2或方式3时,串口为11位数据的异步通信口。TXD为数据发送引脚,RXD为数据接收引脚,方式2和方式3时起始位1位+数据 9 位(含1位附加的第9位,发送时为SCON中的TB8,接收时为 RB8),停止位 1 位,一帧数据11位。方式2的波特率固定为晶振频率的1/64或1/32,方式3的波特率由定时器T1溢出率决定。
发送时,先把起始位0输出到TXD引脚,然后发送移位寄存器的输出位(D0)到TXD引脚。每一个移位脉冲都使输出移位寄存器的各位右移一位,并由TXD引脚输出。第一次移位时,停止位1移入输出移位寄存器的第9位上,以后每次移位,左边都移入0。当停止位移至输出位时,左边其余位全为0,检测电路检测到这一条件时,使控制电路进行最后一次移位,并置TI=1,向CPU请求中断。
接收时,数据从右边移入输入移位寄存器,在起始位0移到最左边时,控制电路进行最后一次移位。当RI=0且SM2=0(或接收到的第9位数据为1)时,接收到的数据装入接收缓冲器SBUF和RB8(接收数据的第9位),置RI=1,向 CPU 请求中断。如果条件不满足,则数据丢失,且不置位RI,继续搜索RXD引脚的负跳变。
7.1.4 USART初始化流程
(1)确定T1的工作方式(编程TMOD寄存器)
(2)计算T1的初值,装载TH1、TL1
(3)启动T1(编程 TCON中的TR1位)
(4)确定串行口控制(编程SCON寄存器)
(5)串行口在中断方式工作时,要进行中断设置(编程IE、IP寄存器)
7.2 USART相关寄存器
7.2.1 串口配置寄存器SCON
寄存器地址:0x98
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
| SM0 | SM1 | SM2 | REN | TB8 | RB8 | TI | RI |
Bit 7~Bit 6:工作方式选择位
| SM0 | SM1 | 工作方式 | 描述 | 波特率 |
| 0 | 0 | 0 | 移位寄存器 | fosc/12 |
| 0 | 1 | 1 | 10位异步收发器(8位数据) | 可变 |
| 1 | 0 | 2 | 11位异步收发器(9位数据) | fosc/32或者fosc/64 |
| 1 | 1 | 3 | 11位异步收发器(9位数据) | 可变 |
Bit 5:多机通信控制位(主要用于方式2和方式3)
1:接收机可以利用收到的RB8来控制是否激活RI(RB8=0时不激活RI,收到的信息丢弃;RB8=1时收到的 数据进入SBUF,并激活RI,进而在中断服务中将数据从SBUF读走) 。
0:不论收到的RB8为何值,均可以使收到的数据进入SBUF,并激活RI(此时RB8不具有控制RI激活的功能)。注:通过控制SM2,可以实现多机通信。在方式0时,SM2必须是0。在方式1时,若SM2=1,则只有接收到有效停止位时,RI才置1
Bit 4:允许串行接收位
1:启动串行口接收数据
0:禁止接收
Bit 3:在方式2或方式3中,是发送数据的第九位,可以用软件规定其作用。可以用作数据的奇偶校验位,在多机通信中,作为地址帧/数据帧的标志位。在方式0和方式1中,该位未用
Bit 2:在方式2或方式3中,是接收到数据的第九位,作为奇偶校验位或地址帧/数据帧的标志位。在方式1时,若SM2=0,则RB8是接收到的停止位
Bit 1:发送中断标志位,在方式0时,当串行发送第8位数据结束时,或在其它方式,串行发送停止位时,由内部硬件使TI置1,必须用软件清0
Bit 0:接收中断标志位。在方式0时,当串行接收第8位数据结束时,或在其它方式,串行接收停止位的中间时, 由内部硬件使RI置1,用软件将其清0
7.2.2 串口波特率配置寄存器PCON
寄存器地址:0x97
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
| SMOD | - | - | - | - | - | - | - |
Bit 7:波特率倍增位
0:波特率保持
1:波特率提高一倍
7.3 例程分析
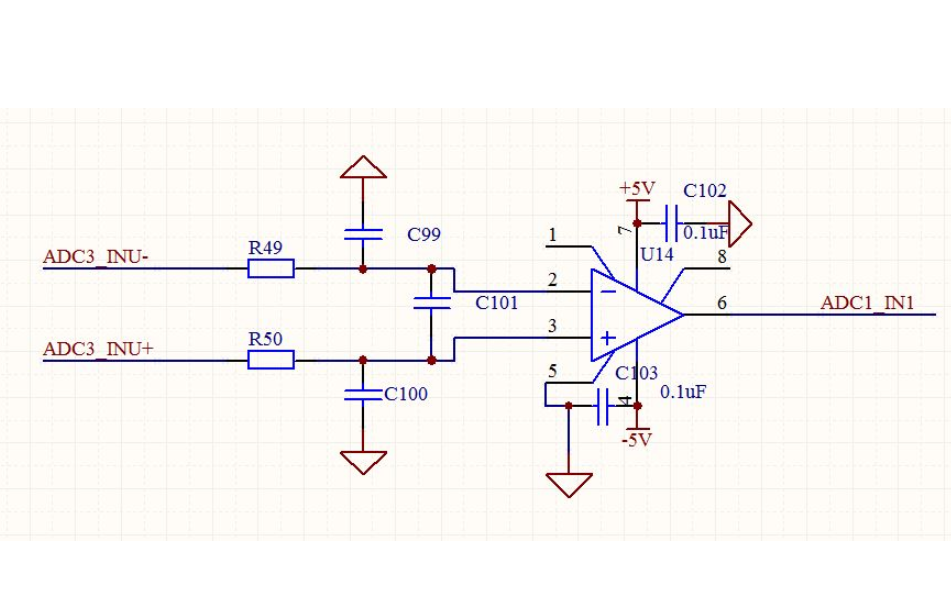
7.3.1 原理图
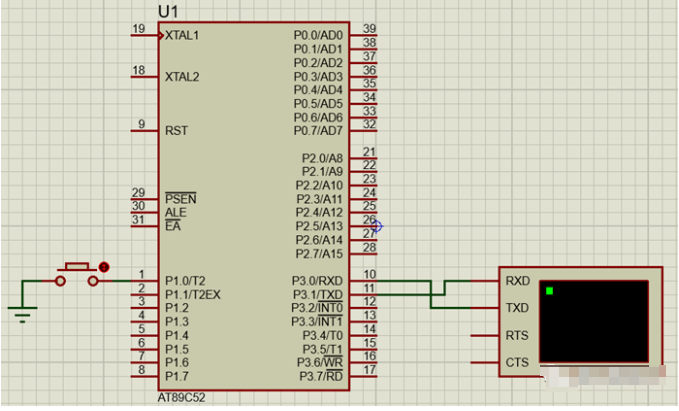
7.3.2 实现的功能
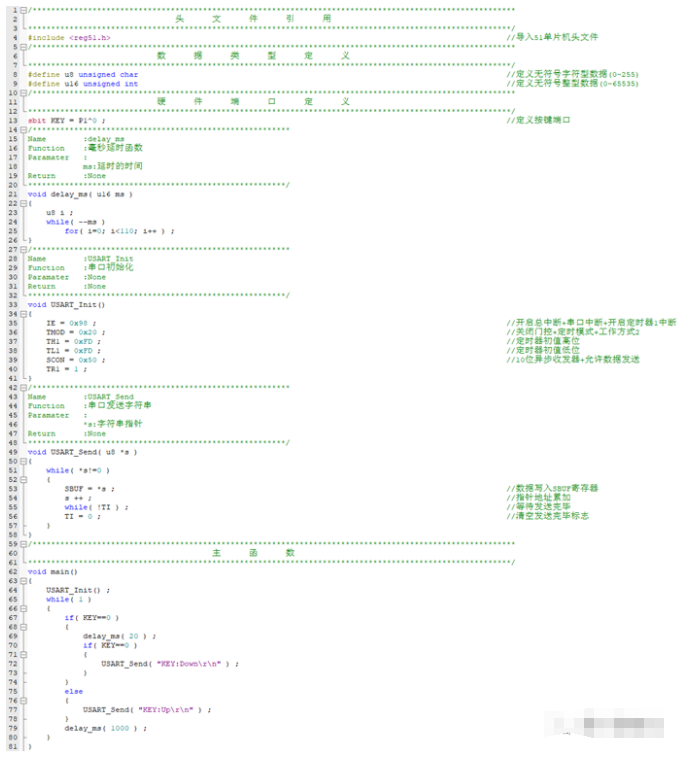
利用单片机串行口,当检测到按键按下时,串口发送一串字符串,当按键抬起时,串口发送另一串字符串。
7.3.3 源代码
-
单片机
+关注
关注
6044文章
44632浏览量
639384 -
计算机
+关注
关注
19文章
7553浏览量
88797 -
同步通信
+关注
关注
0文章
28浏览量
9197 -
串行通信
+关注
关注
4文章
579浏览量
35621 -
USART
+关注
关注
1文章
195浏览量
31023
发布评论请先 登录
相关推荐
STM32的USART简介
USART简介
STM32的USART简介
USART初始化函数与主程序编写简介
USART串口简介及特点
USART—串口通信

介绍串口USART:为ARM初学者导航(13)
【STM32F4】五、串口通信2——软件部分(以USART为例)

STM32—USART串口配置
USART的使用





 工商网监
工商网监
评论