 分析稳定系统中惯性MEMS的频率响应
分析稳定系统中惯性MEMS的频率响应
无人机安装的监视设备、海上微波接收器、车载红外成像传感器和类似的仪器系统需要稳定的平台才能获得最佳性能,但它们通常用于经历振动和其他不良运动的应用。振动和正常的车辆运动会导致通信丢失、图像模糊以及许多其他行为,从而降低仪器的性能和执行所需功能的能力。平台稳定系统采用闭环控制系统来主动消除这种类型的运动,从而保留这些仪器的关键任务性能目标。图1是平台稳定系统的通用框图,该系统使用伺服电机来校正角运动。反馈传感器为仪器平台提供动态方向信息。反馈控制器处理此信息并将其转换为伺服电机的校正控制信号。

图1.基本平台稳定系统。
由于许多稳定系统需要多个主动校正轴,因此惯性测量单元(IMU)通常包括至少三个陀螺仪轴(测量角速度)和三个加速度计轴(测量加速度和角方向)以提供反馈传感功能。反馈传感器的最终目标是提供平台方向的精确测量,即使在平台处于运动状态时也是如此。由于没有“完美”的传感器技术可以在所有条件下提供精确的角度测量,因此平台稳定系统中的IMU通常在每个轴上使用两种或三种传感器类型。
加速度计在其每个轴的方向上响应静态和动态加速度。“静态加速度”可能看起来是一个奇怪的术语,但它包含了重要的传感器行为:对重力的响应。假设不存在动态加速度,并且传感器误差已通过校准消除,则每个加速度计输出将代表其轴相对于重力的方向。为了确定稳定系统中经常经历的振动和快速加速度下的实际平均方向,滤波器和融合程序(结合来自多种传感器类型的读数以获得最佳估计值)通常应用于原始测量。
另一种类型的传感器是陀螺仪,它提供角速率测量。陀螺仪测量通过在有限时间段内积分角度速率来促进角度测量。执行积分时,偏置误差会导致随时间累积的比例角度漂移。因此,陀螺仪性能通常与器件偏置对不同环境因素的灵敏度有关,例如温度变化、电源变化、离轴旋转和线性加速度(线性g和整流g×g)。经过校准的高质量陀螺仪具有高线性加速度抑制能力,使这些器件能够提供宽带角度信息,以补充加速度计提供的低频信息。
第三种类型的传感器是3轴磁力计,用于测量磁场强度。从三个正交轴测量磁场可以估计相对于地球磁场的局部方向的方向角。当磁力计靠近电机、监视器和其他动态场干扰源时,管理其精度可能具有挑战性,但在适当的情况下,其角度数据可以增强加速度计和陀螺仪的测量。虽然许多系统仅使用加速度计和陀螺仪,但磁力计可以提高某些系统的测量精度。
图2的通用框图显示了陀螺仪和加速度计测量如何利用其基本优势,但尽量减少其弱点的影响。低通加速度计和高通陀螺仪滤波器的极点位置通常取决于应用,精度目标、相位延迟、振动和“正常”运动预期都有助于这些决策。与系统相关的行为也会影响加权因子,这也会影响这两个测量值的组合方式。扩展卡尔曼滤波器是结合滤波和加权函数来计算动态角度估计的算法的一个例子。

图2.组合单轴传感器输出。
微机电系统IMU频率响应分析
在围绕新的MEMS IMU开发稳定系统时,在系统设计的早期阶段了解频率响应非常重要,因为IMU的频率响应将对控制器设计产生直接影响,并有助于识别潜在的稳定性问题,尤其是在考虑为下一代设计提供更宽带宽的解决方案时。此信息对于预测陀螺仪对振动的响应也很有用。
评估 IMU 带宽的策略是确定产品文档中可用的信息,分析此信息对系统对惯性运动响应的影响,并稳定系统的响应。该分析及其所需的任何纠正措施将成为初步测试的基础。
频率响应在IMU和陀螺仪的规格表中通常表示为“带宽”。作为性能参数,它表示输出幅度下降到传感器实际运动幅度的约70%(–3 dB)的频率。在某些情况下,带宽也可以由输出响应滞后实际运动90度的频率来定义(对于2极系统)。这两个指标都会直接影响控制环路的一个重要稳定性标准:单位增益相位裕量——环路增益为1时环路响应的实际相位角与–180°之间的差异。了解反馈传感器的频率响应是优化稳定性保证和系统响应之间权衡的关键因素。除了管理稳定性标准外,频率响应还直接影响振动抑制和建立采样策略,允许测量惯性平台上的所有关键瞬态信息。
分析系统中的频率响应从高级“黑匣子”视图开始,该视图描述了系统在整个目标频率范围内对输入的响应。在电子电路中,输入和输出以通用术语定义,例如信号电平(伏特),这通常涉及使用s域表示和电路级关系(例如基尔霍夫电压和电流定律)开发传递函数。对于惯性MEMS系统,输入是IMU经历的惯性运动,输出通常由数字代码表示。虽然 s 域分析技术很有价值,但为这种类型的系统开发完整的传递函数通常需要额外的技术和考虑。
分析过程从了解与传感器信号链相关的所有组件开始。图 3 提供了典型函数的总体图。信号链从核心传感器元件开始,将惯性运动转换为具有代表性的电信号。如果传感器元件的带宽不受限制,则通常会受到ADC之前信号调理电路中的滤波器的限制。信号数字化后,处理器通常应用校正(校准)公式和数字滤波。次级数字滤波器降低了反馈系统在其控制例程中使用的带宽和采样速率。所有这些级都会影响传感器信号相对于频率的增益和相位。图3提供了一个在混合信号处理系统中具有多个滤波器的IMU示例。该系统将作为说明一些有用的分析技术的示例。

图3.信号链中的ADIS16488传感器,用于频率分析。
核心MEMS传感器元件
这种分析是由这样一种理解驱动的:所有可以量化的行为都应该是;然后,可以对那些不容易量化的事情做出有根据的假设。一旦“已知”变量被充分理解,通常更容易重新审视这些假设以进行审查和澄清。ADIS16488的规格表(图3)显示–3 dB带宽为330 Hz。 假设核心传感器处于临界阻尼状态,并且在带宽远低于其谐振(16 kHz至20 kHz)时不是关键因素。这可能并非总是如此,但这是一个很好的起点,可以在过程的后期使用噪声密度或全运动测试进行测试。
此外,每个陀螺仪传感器在ADC之前都要经过一个2极点低通滤波器。这提供了足够的信息来使用拉普拉斯变换在 s 域中开发传递函数表示。第一极(f1) 处于 404 Hz,第二个极点 (f2) 为 757 Hz。

加速度计的单极 (f1) 传递函数是。

这些公式为程序中的数值分析提供了基础,这些程序可以管理与“s = jω”恒等式相关的复数。在 MATLAB 中,以下 m 脚本将生成幅度(比率,无单位)和相位(度)信息:
Fmax = 9840/2; % one-half of the sample rate
for f = 1:Fmax
w(f) = 2*pi*f;
end
p1 = 404; % pole location = 404Hz
p2 = 757; % pole location = 757Hz
NUM1 = 2*pi*p1;
DEN1 = [1 2*pi*p1];
NUM2 = 2*pi*p2;
DEN2 = [1 2*pi*p2];
H1 = tf(NUM1,DEN1); % transfer function for first pole
H2 = tf(NUM2,DEN2); % transfer function for second pole
H488a = H1 * H2; % transfer function for 2-pole filter
[maga,phasea] = bode(H488,w);
for f = 1:Fmax
Mag488a(f) = maga(1,1,f);
Phase488a(f) = phasea(1,1,f);
end
为了快速评估与这些滤波器相关的时间延迟,请注意,单极点滤波器的相位延迟在其−3 dB频率下等于45°,或转折频率周期的1/8。在这种情况下,加速度计滤波器的时间延迟大约等于0.38 ms。对于陀螺仪,延迟等于两级的时间延迟之和,或约0.47 ms。

平均/抽取滤波器级
图3显示了两个平均/抽取滤波器级的使用,它们降低了级的输出采样速率并提供额外的滤波。在具有有限脉冲响应(FIR)的数字滤波器中,相位延迟等于抽头总数的一半除以每个抽头的采样速率。在第一个滤波阶段,采样率为9.84 kHz。有四个水龙头,在这种过滤器样式中,它们等于平均值的数量。相位延迟约为0.2 ms。平均滤波器的幅度响应遵循这种关系。

使用 MATLAB 进行分析时,请使用采样率 (fs) 的 9.84 kSPS 和四个抽头 (N),以及用于分析模拟滤波器的相同频率阵列 (f)。使用通用频率阵列将更容易组合每个阶段的结果。使用以下代码分析此第一阶段:
Fmax = 9840/2;%采样率的一半
f = 1:Fmax;
NUM(f) = sin(4*pi*f/9840);
DEN(f) = 4 * sin(pi*f/9840);
对于 fq = 1:Fmax
Hda(fq) = abs(NUM(fq)/DEN(fq));
结束
分析第二个平均/抽取滤波器需要事先了解控制系统的采样率,但将使用相同的关系。例如,如果控制环路要求采样率接近 400 SPS,则第二个滤波器的平均采样率和抽取率将等于 6(对于 410 SPS 和 4 个样本的采样率,9840/[410 × 4] = 6)。使用相同的 m 脚本代码分析幅度响应,但有三个例外:(1) 将采样率从 9480 更改为 2460,(2) 将两个位置的“4”更改为“6”,以及 (3) 更改 F.MAX从 9840/2 到 2460/2。相位等于抽头总数的一半除以采样率,约为1.22 ms (3/2460)。
复合响应
图4和图5提供了复合幅度和相位响应,其中包括陀螺仪的模拟滤波器和两个抽取滤波器。图4表示将阵列中每个频率的级幅度相乘的结果。图5表示在每个频率下将级的相位贡献相加的结果。标有“无抽取”的曲线假设输出数据速率为2460 SPS,并且第二个抽取级被有效关闭。标有“抽取”的曲线假设抽取率等于6,最终输出数据速率为410 SPS。这两张图说明了控制环路采样速率和相应频率响应之间系统级权衡的响应差异。

图4.模拟滤波器和第一抽取级。

图5.针对 410-SPS 数据速率的复合响应。
可编程 FIR 滤波器分析
一旦知道模拟滤波器和抽取滤波器的贡献,就可以评估使用板载抽取滤波器和设计定制FIR滤波器之间的权衡。在图3所示的ADIS16488中,FIR滤波器包含在IMU中,但有些系统会在其数字信号处理例程中实现这一点。FIR滤波器的时域f(n)表示通常由差分方程表示,其中z变换为频率分析提供了分析工具:

幸运的是,许多现代程序都包含基于这些基本关系的此类分析的特定工具或命令。在验证自动评估工具的结果以及直观地了解何时质疑FIR设计工具的输出时,理解它们仍然很有用。MATLAB“fdatool”命令启动其滤波器分析和设计包,帮助设计和分析系统FIR滤波器实现。
惯性频率响应测试方法
在陀螺仪中测试频率响应的最直接方法是使用惯性速率表,该表能够引入适当的频率成分。速率表通常包括可编程伺服电机和光学编码器,用于验证电机轴上的编程旋转。这种测试方法的优点是它应用了实际的惯性运动。它的缺点是,对于刚开始使用MEMS的工程师来说,它并不常见。
对于没有速率表的早期分析验证,测量目标频带上的频谱噪声可以提供有用的见解。这种简化的方法不需要复杂的测试设备,只需要与稳定平台和数据收集仪器的安全机械连接。然而,它确实依赖于相对于频率具有“平坦”噪声幅度的机械噪声。
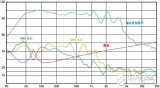
图6显示了两个示例,它们都使用相同的2极点低通滤波器。第一个示例(ADIS16375)使用的陀螺仪在其可用频率范围内具有平坦的响应。第二个示例(ADIS16488)使用的陀螺仪在1.2 kHz处具有适量的峰值,实际上将–3 dB频率扩展到约380 Hz。 认识到这种谐振行为对于正在建模和仿真控制环路的人来说很有价值。在简单的测试中识别这种行为也有助于解释在执行更彻底的系统表征时高于预期的噪声水平。在项目早期理解和识别后,通常可以通过调整滤波器极来管理这些行为。
测量噪声密度时,请确保采样率至少是目标最高频率的两倍,以满足奈奎斯特准则。此外,获取足够的数据样本以减少测量的不确定性。图6中的曲线来自长度为256k样本的时间记录的FFT分析,最大速率为2.46 kSPS。

图6.噪声密度比较。
另一种方法是使用陀螺仪的自检功能。自检功能提供了使用电信号刺激传感器机械结构的机会,而无需设备承受外部惯性运动。自检功能强制改变传感器内核,模拟其对实际运动的响应,从而在电输出中产生相应的变化。并非所有产品都提供对此的实时访问,但如果可用,或者制造商可以提供此类频率响应测试的数据,它可以成为一个有用的工具。在最简单的方法中,将模拟对步骤响应的自检与分析期望进行比较。在特定频率下重复自检断言提供了一种直接方法,用于研究每个频率下的传感器响应幅度。考虑图 7 中的两种不同响应。在较低频率下,陀螺仪输出看起来像方波,但每个转换处的瞬态响应除外。瞬态响应遵循传感器信号链中滤波器网络的“阶跃响应”预期。在第二个示例中,自检的频率足够高以防止完全建立,则幅度会减小。请注意图中底部信号上的蓝色和黑色点状响应之间的幅度差异。有许多方法可以估计这些时间记录的大小。离散傅里叶变换(DFT)将初级频率成分(自检频率)与谐波成分分开,谐波成分可能会对幅度/频率响应产生误差。

图7.自检。
结论
更宽带宽IMU的趋势为反馈稳定系统的设计提供了显著的优势。更宽的带宽可为多传感器系统提供更好的时间对准和相位裕量管理。滤波电容器的值和对温度的响应变化很大,这可能导致极点频率成比例变化。由于相位延迟取决于极点位置,因此了解和管理这一点非常重要。例如,当反馈传感器的截止频率是控制器单位增益反馈的两倍时,它将为环路响应增加约22.3°的相位延迟。如果截止频率降低20%,相位延迟增加约5.6°。增加单位增益带宽中的截止频率比可将这些影响降低4倍。
审核编辑:郭婷
-
传感器
+关注
关注
2552文章
51222浏览量
754629 -
接收器
+关注
关注
14文章
2473浏览量
71989 -
mems
+关注
关注
129文章
3945浏览量
190782
发布评论请先 登录
相关推荐
怎样测量MEMS加速度传感器的频率响应?
稳定系统中的惯性MEMS的频率响应分析
分析稳定系统中的惯性MEMS的频率响应


分析稳定系统中的惯性MEMS的频率响应

频率响应是什么意思_频率响应特性
音响频率响应多少好_频率响应大好还是小好
频率响应是什么
电源稳定性分析-Moku:Lab频率响应分析仪应用指南






 工商网监
工商网监
评论