 简单的电路提供可调节的CAN级差分输出信号
简单的电路提供可调节的CAN级差分输出信号
控制器局域网(CAN)串行总线拓扑允许设备和微控制器在不使用主机的情况下相互通信。它具有无仲裁传输的特点,在每个设备节点上放置一个控制器和一个主机处理器,消除了将设备与主机互连所需的更复杂的线束。
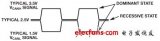
通过使用CANH和CANL线路上的信号,CAN总线有两种状态:隐性和显性。如果差分电压大于0.9 V,则总线处于显性状态,如果差分电压小于0.5 V,则总线处于隐性状态。 CAN收发器(如ADM3051)将CAN控制器连接到物理层总线。

图1.CAN总线信号和状态。
CAN收发器可以使用自动测试设备(ATE)或工作台上的直流信号进行表征。图2所示电路使用来自函数发生器的方波信号向收发器提供可调CAN信号。选择AD8138高速差分放大器是因为它具有宽带宽和低失真。输出端的直流电平转换器可以调节输出信号的差分电平,同时保持其峰峰值电平。幅度和频率通过信号发生器进行调整。

图2.AD8138驱动CAN收发器。
该电路采用5 V单电源供电,配置为单位增益单端转差分放大器,共模设置为中间电源。R1、R2和R3构成直流偏置电路,将输出信号调节到CAN电平。与R2相比,通过保持R4和R5小,电位计可以方便地调节两个输出信号之间的差值,而不会显着影响它们各自的幅度,从而为DUT提供具有可变共模电平的CAN信号。由于R1和R3相等,因此在调整R2时,输出的交流共模也不受影响。R4和R5与R2一起构成AD8138放大器输出端分压器的一部分。为R4和R5选择尽可能小的值,以最小化输出端的衰减以及调整R2对每个输出峰峰值电平的影响。如果R2短路,R4和R5也将提供最小负载以保护放大器的输出。电容C1和C2将直流偏置与放大器的输出共模隔离开来。这些电容还与电阻偏置网络形成一个高通滤波器;其截止频率为:

其中 C = C1 = C2,以及RL是负载或 DUT 输入电阻,通常约为 20 kΩ 至 30 kΩ。
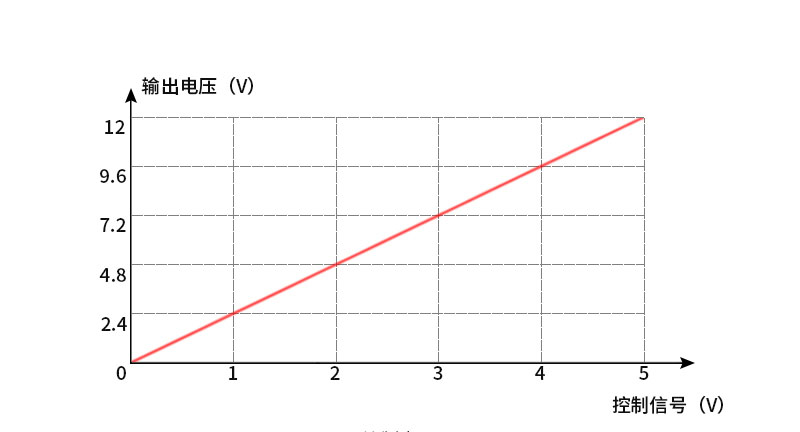
为避免方波输出信号失真,应选择尽可能大的C 1和C2,以使输入信号频率是最坏情况下截止频率的10倍,其中R2||RL是最低限度的。例如,要实现V灿和V坎尔电平如图3(a)所示的信号,R2必须至少为 700 Ω,假设没有输出 (DUT) 加载效应。0.1 μF或1 μF耦合电容可容纳1 MHz信号。图3(b)显示了R2如何调整差分输出电平。
将这些输出信号用作 V灿和 V坎尔收发器的输入使台式示波器测量能够表征接收机参数,例如传播延迟、上升时间和所需频率的阈值。

图3.VCANH 和 VCANL 输出。
审核编辑:郭婷
-
微控制器
+关注
关注
48文章
7750浏览量
152792 -
控制器
+关注
关注
113文章
16619浏览量
180648 -
CAN总线
+关注
关注
145文章
1965浏览量
131594
发布评论请先 登录
相关推荐
基于嵌入式系统可调节输出电压的高效电源设计
用LMH6703这款芯片做了一个一级差分放大电路,相位延迟波动怎么解决?
采用简单电路提供可调CAN电平差分输出信号






 工商网监
工商网监
评论