 思岚科技 :持续深耕SLAM技术,赋能多领域应用
思岚科技 :持续深耕SLAM技术,赋能多领域应用
1月13日,由上海市人工智能行业协会主办的“智能机器人SLAM导航技术研讨会”在上海机器人产业技术研究院进行。思岚科技受邀参会,共讨SLAM导航技术发展。
会上, 思岚科技研究VP白静为大家带来了“多源融合SLAM导航技术与应用”的主题演讲,跟大家分享了SLAM导航技术作为机器人移动的核心技术,在发展的过程中有哪些技术难点,以及思岚是如何应对的。
思岚科技作为服务机器人自主定位导航移动商,致力于“让机器人移动更智能”。从多技术角度去思考服务机器人场景的适配问题,其中包含了雷达传感器、软件算法和方案体系。
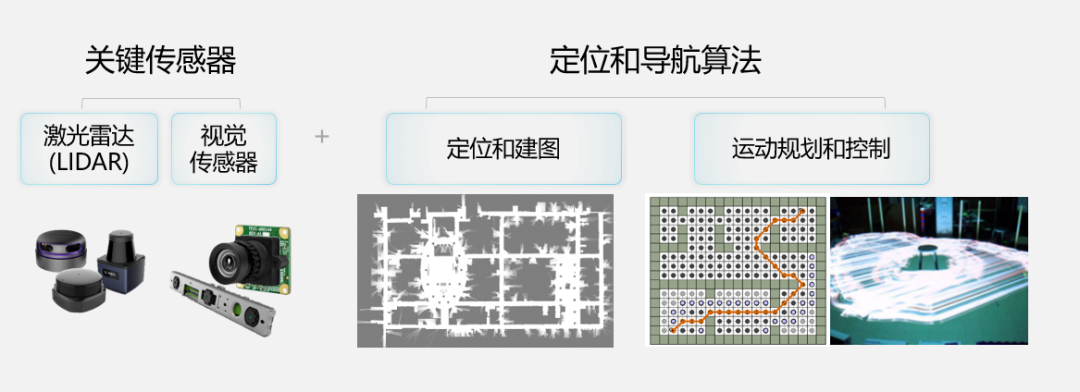
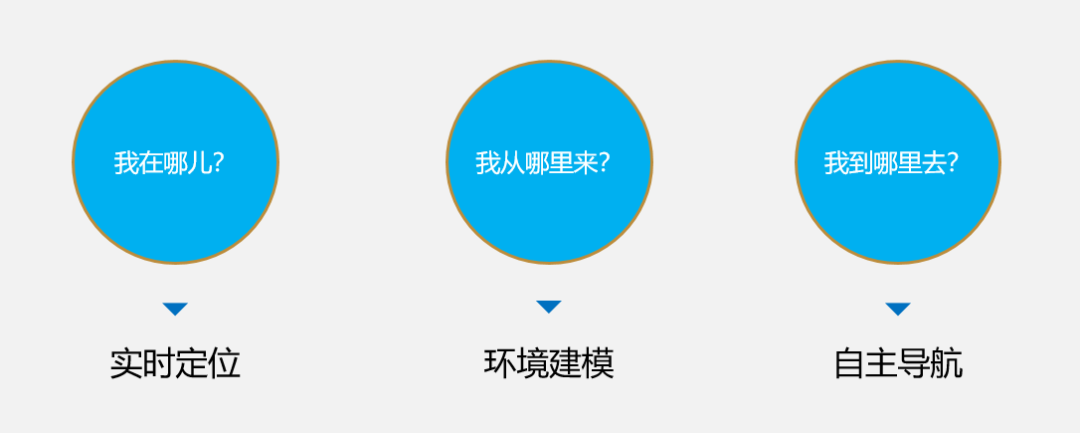
但是激光雷达传感器获取到的只是一个局部信息,无法单靠一己之力解决机器人“我在哪儿?我从哪里来?我到哪里去?”三大哲学问题。所以,我们还需要SLAM算法技术赋能。
目前,思岚采用的是基于图优化方式SLAM3.0算法技术进行构图,能实现100,000+平米级别的地图构建能力,同时拥有主动式回环闭合纠正能力,能很好的消除长时间运行导致的里程累计误差。
再也不需要面对“能力不够,人力来凑”的尴尬局面了。
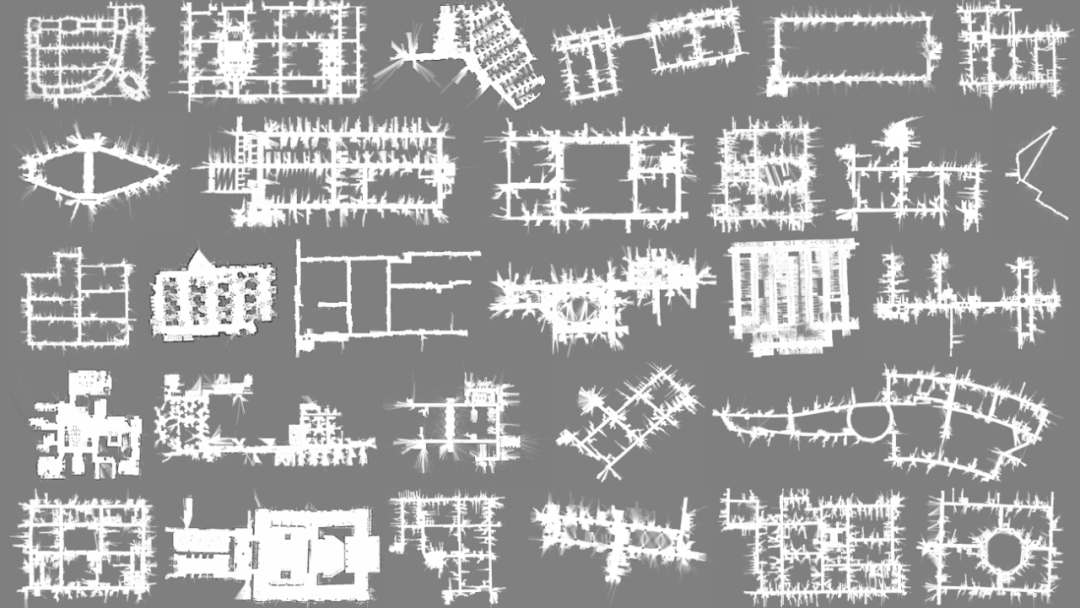
▲ 思岚在各类场景下的建图
相比较粒子滤波每次直接将传感器数据更新进入栅格地图进行增量式构建的做法,SLAM3.0存储地图构建过程中调整了图结构中每个节点的pose和对应的传感器信息以及所有关键点构建的位姿关系图,利用全部的机器人位姿信息和对应传感器数据生成环境地图。

▲基于滤波器SLAM系统
在最后的圆桌讨论环节中,白静表示:SLAM算法在落地过程中会面临很多挑战,比如强阳光、玻璃、超大的工作环境等等,所以我们思岚在提供上述SLAM导航技术的同时,还融合了多传感器数据,让机器人更为直观地判断出周围的环境,确保更多可靠的信息被利用,做出更智能,更类人的判断,完成导航。

思岚科技“传感器+算法+解决方案”这一全链路解决方案,从技术层面降低了成本,从应用层面降低了门槛,获得了不少服务机器人厂商的青睐,在众多行业得到很多落地应用。思岚科技也希望后续继续和产业链、上下游伙伴一起,探索智能机器人新未来。
审核编辑 :李倩
-
传感器
+关注
关注
2551文章
51163浏览量
754155 -
SLAM
+关注
关注
23文章
425浏览量
31856 -
激光雷达
+关注
关注
968文章
3981浏览量
190014
原文标题:思岚科技 :持续深耕SLAM技术,赋能多领域应用
文章出处:【微信号:slamtec-sh,微信公众号:思岚科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
思岚科技获批建立2024年度院士(专家)工作站

思岚科技LPX-E3区域监控雷达到底硬核在哪里
英锐恩科技引领微控制器MCU技术创新,赋能多元化应用!
单北斗+鸿蒙系统,顶坚北斗手持终端赋能多领域行业应用

思必驰深耕汽车领域,持续革新交互体验
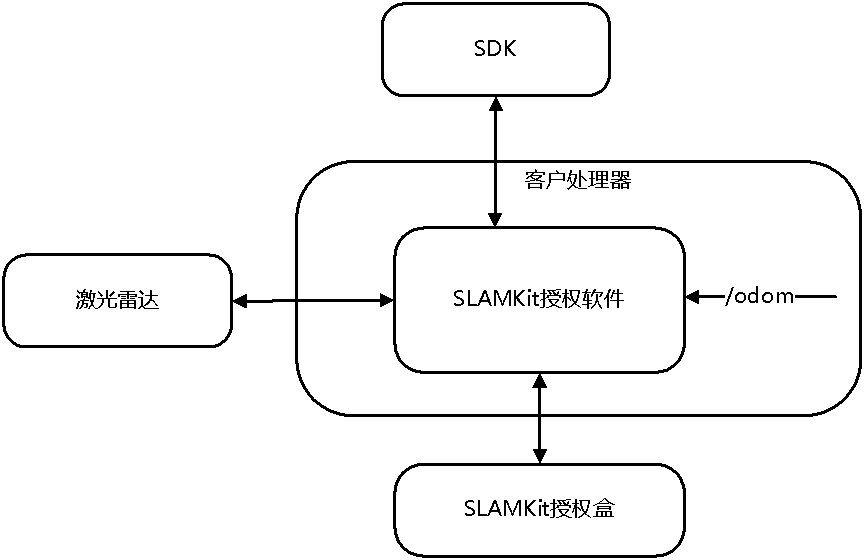
思岚科技SLAMKit定位与建图解决方案介绍
思特威明星产品赋能高端工业机器视觉
AI赋能储能价值新生,海博思创即将亮相欧洲智慧能源展
储能领军企业海博思创:深耕行业,荣获电气工业百强殊荣

亿纬动力凭借卓越的技术实力与赋能表现荣获“开发赋能奖”
华为与岚图签署战略合作,推动智能化技术商业化
东风岚图与华为达成战略合作

思岚科技荣获“楼宇黑科技TOP10”,助力智慧楼宇新变革






 工商网监
工商网监
评论