 如何在电机全速范围内获得准确的磁链?
如何在电机全速范围内获得准确的磁链?
一、引言
磁链估计是高性能交流感应电机调速系统中的重要组成部分。而磁链在实际应用中一般不用传感器直接检测,所以现代交流电力传动控制系统常用磁链估计模型来估算磁链。在电机运行过程中,要考虑磁饱和、温度等干扰信号对电机参数造成偏差的影响,所以如何在电机全速范围内获得准确的磁链即提高磁链观测器的参数鲁棒性成为众多学者的研究内容。
转子磁链观测器利用定子电压、定子电流或转子转速信号观测出转子磁链的相位和幅值。如果转子磁链的相位观测不准,那么定子电流的励磁分量与转矩分量就不能实现完全的解耦,可能会造成系统的振荡甚至不稳定。
如果观测出转子磁链的幅值偏大,会使得电机运行在弱磁状态,减小电机的带载能力;如果观测出转子磁链的幅值偏小,会导致过大的励磁电流,使电机的铁心饱和,严重时还会导致绕组过热而烧坏电机。
因此决定整个矢量控制系统性能优劣的最为关键环节就是转子磁链观测器。
二、不同坐标系下的电流型磁链观测器
根据描述磁链与电流的关系的磁链方程来计算转子磁链,所得的模型叫做电流模型。电流模型可以在不同的坐标系上获得。
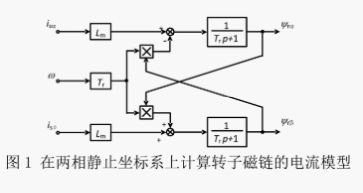
2.1 在两相静止坐标系下的电流模型
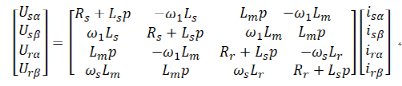
在两相alpha、beta坐标系下的电压方程:
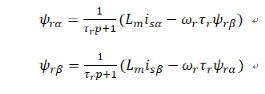
由上可以得到静止坐标系下的基于电流模型的转子磁链向量表达式如下(标量形式):
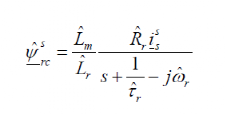
也可以表达成静止坐标系下的复矢量形式:
2.2 在两相旋转坐标系下的电流模型
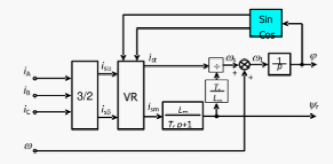
图2 两相旋转坐标系下的电流型转子磁链观测器模型
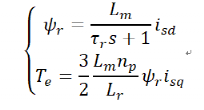
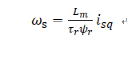
相关公式如下:
三、不同坐标系下的电流型磁链观测器仿真实现
3.1、静止坐标系下的电流型磁链观测器(标量形式)
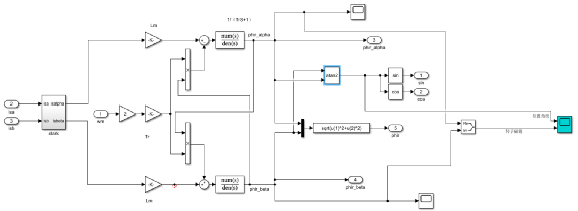
图3 电流型磁链观测器模型(标量)
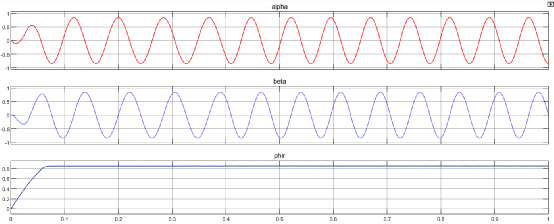
图4 波形变化情况
3.2、静止坐标系下的电流型磁链观测器(复矢量形式)

图5 电流型磁链观测器模型(复矢量)
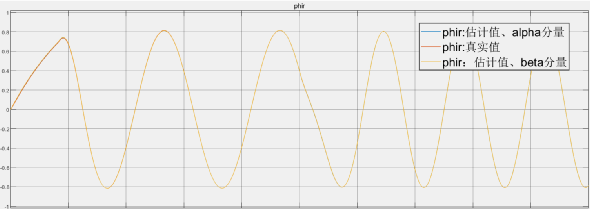
图6 波形变化情况
3.3、旋转坐标系下的电流型磁链观测器
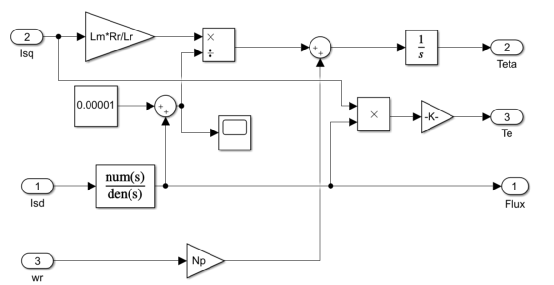
图7 电流型磁链观测器模型
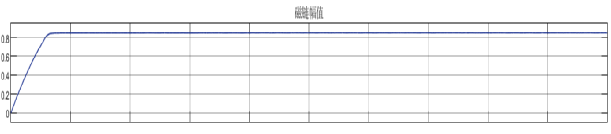
图8 波形变化情况
审核编辑:刘清
-
传感器
+关注
关注
2550文章
51035浏览量
753063 -
控制系统
+关注
关注
41文章
6604浏览量
110576 -
异步电机
+关注
关注
6文章
427浏览量
32844 -
定子电流
+关注
关注
0文章
6浏览量
1976 -
磁链观测器
+关注
关注
0文章
9浏览量
1382
原文标题:基于电流型磁链观测器的异步电机矢量控制学习
文章出处:【微信号:浅谈电机控制,微信公众号:浅谈电机控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
如何获得一个25米距离处6米宽2.5米高范围内的坐标
如何获得一个25米距离处6米宽2.5米高范围内的坐标
如何获得一个25米距离处6米宽2.5米高范围内的坐标
永磁同步电机全速范围转子定位系统设计
基于二阶广义积分器的永磁同步电机定子磁链观测方法
TI远程与本地温度传感器准确度在+/-1℃范围内
有没有办法在~50µs范围内获得可靠的GPTimer中断,而不会被WiFi阻止?
全速范围直接转矩控制新型建模与研究
微型电机有哪些类型及可以应用在什么范围内
基于电压型磁链观测器的异步电机矢量控制学习

基于电流型磁链观测器的异步电机矢量控制学习





 工商网监
工商网监
评论