 通过FPGA实现一个以太网控制器MAC的实例
通过FPGA实现一个以太网控制器MAC的实例

导读
当前,互联网已经极大地改变了我们的生产和生活。与之相适应的,在嵌入式系统的研究开发方面,也越来越重视网络功能。嵌入式系统已经不再局限于一个个孤立的控制、处理单元,而是走向网络集成化,从而实现了多个系统的集中控制、信息共享。
以太网(Ethernet)技术在嵌入式系统上的开发应用,已经成为当前嵌入式研究领域的技术热点之一。一方面,与传统的 RS-485、CAN 等相比较,以太网更加高速、通用,而且还可以直接与 Internet 相连接,提供更大范围的远程访问;此外,经过适当剪裁和优化的 TCP/IP协议栈,也完全可以适应工业用途的需求。另一方面,相对于新兴的 USB 2.0、IEEE 1394 等总线,以太网技术在传输距离、布线成本以及控制软件的通用性上都有明显的优势。
基于以太网的嵌入式系统,在以下方面都有良好的应用前景:
• 工业:工业控制、网络仪表、远程的分布式数据采集……
• 家庭自动化:智能家庭、信息家电、家庭网关……
• 商业:远程销售平台、智能自动售货机、公共电话卡发行系统……
• 环保:水源和空气污染监测,防洪体系及水土质量监测、堤坝安全……
• 其他:交通管理、车辆导航、自动抄表……
因此在使用 FPGA 设计各种嵌入式应用系统时,需要考虑为系统提供以太网接口。本章将通过 FPGA 实现一个以太网控制器(MAC)的实例,详细介绍实现过程。
第三篇内容摘要:本篇会介绍程序的仿真与测试和总结,包括顶层程序、外部 PHY 芯片模拟程序、仿真结果等相关内容。
四、程序的仿真与测试
上面已经介绍了程序的主要部分。为了检验程序是否实现预先设定的功能,需要编写仿真程序。
以太网控制器的仿真程序(Testbench)需要同时模拟数据通信的两端:主机(上层协议)和外部 PHY 芯片。因此,设计仿真程序的结构如图 12 所示。
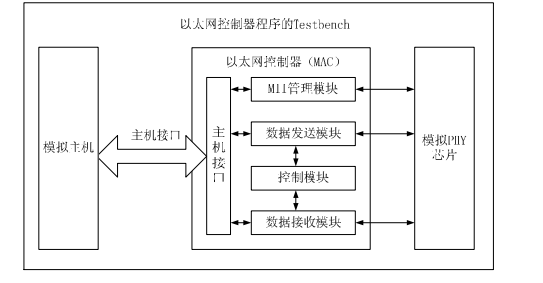
图 12 以太网控制器程序Testbench 的结构
从图 12 上可以看到仿真程序应该包括:顶层程序、模拟 PHY 程序、模拟主机程序和以太网控制程序。
4.1 顶层程序
顶层程序负责连接仿真程序的各个部分:模拟 PHY 程序、模拟主机程序和以太网控制程序。同时顶层程序需要控制仿真的进行,主要代码如下:
`include "eth_phy_defines.v" `include "wb_model_defines.v" `include "tb_eth_defines.v" `include "eth_defines.v" `include "timescale.v" module tb_ethernet(); //寄存器与连线 reg wb_clk; …… //连接以太网控制器 eth_top eth_top( .wb_clk_i(wb_clk), .wb_rst_i(wb_rst), .wb_adr_i(eth_sl_wb_adr_i[11:2]), .wb_sel_i(eth_sl_wb_sel_i), .wb_we_i(eth_sl_wb_we_i), .wb_cyc_i(eth_sl_wb_cyc_i), .wb_stb_i(eth_sl_wb_stb_i), .wb_ack_o(eth_sl_wb_ack_o), .wb_err_o(eth_sl_wb_err_o), .wb_dat_i(eth_sl_wb_dat_i), .wb_dat_o(eth_sl_wb_dat_o), .m_wb_adr_o(eth_ma_wb_adr_o), .m_wb_sel_o(eth_ma_wb_sel_o), .m_wb_we_o(eth_ma_wb_we_o), .m_wb_dat_i(eth_ma_wb_dat_i), .m_wb_dat_o(eth_ma_wb_dat_o), .m_wb_cyc_o(eth_ma_wb_cyc_o), .m_wb_stb_o(eth_ma_wb_stb_o), .m_wb_ack_i(eth_ma_wb_ack_i), .m_wb_err_i(eth_ma_wb_err_i), //发送数据 .mtx_clk_pad_i(mtx_clk), .mtxd_pad_o(MTxD), .mtxen_pad_o(MTxEn), .mtxerr_pad_o(MTxErr), //接收数据部分 .mrx_clk_pad_i(mrx_clk), .mrxd_pad_i(MRxD), .mrxdv_pad_i(MRxDV), .mrxerr_pad_i(MRxErr), .mcoll_pad_i(MColl), .mcrs_pad_i(MCrs), //媒体无关接口模块 .mdc_pad_o(Mdc_O), .md_pad_i(Mdi_I), .md_pad_o(Mdo_O), .md_padoe_o(Mdo_OE), .int_o(wb_int) ) //连接模拟 PHY 部分 assign Mdio_IO = Mdo_OE ? Mdo_O : 1'bz ; assign Mdi_I = Mdio_IO; integerphy_log_file_desc; eth_phyeth_phy( .m_rst_n_i(!wb_rst), // MAC 发送数据 .mtx_clk_o(mtx_clk), .mtxd_i(MTxD), .mtxen_i(MTxEn), .mtxerr_i(MTxErr), // MAC 接收数据 .mrx_clk_o(mrx_clk), .mrxd_o(MRxD), .mrxdv_o(MRxDV), .mrxerr_o(MRxErr), .mcoll_o(MColl), .mcrs_o(MCrs), //媒体无关接口模块 .mdc_i(Mdc_O), .md_io(Mdio_IO), .phy_log(phy_log_file_desc) ); // 连接主机模块 integer host_log_file_desc; WB_MASTER_BEHAVIORALwb_master( .CLK_I(wb_clk), .RST_I(wb_rst), .TAG_I({`WB_TAG_WIDTH{1'b0}}), .TAG_O(), .ACK_I(eth_sl_wb_ack_o), .ADR_O(eth_sl_wb_adr), // only eth_sl_wb_adr_i[11:2] used .CYC_O(eth_sl_wb_cyc_i), .DAT_I(eth_sl_wb_dat_o), .DAT_O(eth_sl_wb_dat_i), .ERR_I(eth_sl_wb_err_o), .RTY_I(1'b0), // inactive (1'b0) .SEL_O(eth_sl_wb_sel_i), .STB_O(eth_sl_wb_stb_i), .WE_O (eth_sl_wb_we_i), .CAB_O() // NOT USED for now! ) assign eth_sl_wb_adr_i = {20'h0, eth_sl_wb_adr[11:2], 2'h0}; …… //初始化 initial begin //复位信号 wb_rst = 1'b1; #423 wb_rst = 1'b0; //清除存储器内容 clear_memories; clear_buffer_descriptors; #423 StartTB = 1'b1; end //产生时钟信号 initial begin wb_clk=0; forever #15 wb_clk = ~wb_clk; // 2*10 ns -> 33.3 MHz end integer tests_successfull; integer tests_failed; reg [799:0] test_name; // used for tb_log_file reg [3:0] wbm_init_waits; // initial wait cycles between CYC_O and STB_O of WB Master reg [3:0] wbm_subseq_waits; // subsequent wait cycles between STB_Os of WB Master reg [2:0] wbs_waits; // wait cycles befor WB Slave responds reg [7:0] wbs_retries; // if RTY response, then this is the number of retries before ACK regwbm_working;//taskswbm_writeandwbm_readsetsignalwhenworkingandresetitwhenstopworking //开始测试内容 initial begin wait(StartTB); // 开始测试 //初始化全局变量 tests_successfull = 0; tests_failed = 0; wbm_working = 0; wbm_init_waits = 4'h1; wbm_subseq_waits = 4'h3; wbs_waits = 4'h1; wbs_retries = 8'h2; wb_slave.cycle_response(`ACK_RESPONSE, wbs_waits, wbs_retries); //测试的各个任务 test_note("PHY generates ideal Carrier sense and Collision signals for following tests"); eth_phy.carrier_sense_real_delay(0); test_mac_full_duplex_transmit(0, 21); //测试全双工方式下传输数据 test_mac_full_duplex_receive(0, 13); //测试全双工方式下接收数据 test_mac_full_duplex_flow_control(0, 4); // 测试整个数据流程 test_note("PHY generates 'real delayed' Carrier sense and Collision signals for following tests"); eth_phy.carrier_sense_real_delay(1); // 结束测试 test_summary; $stop; end
测试内容通过多个测试任务来执行。限于篇幅,测试任务的内容不一一列出。
4.2 外部 PHY 芯片模拟程序
模拟程序模拟了简化的 LXT971A 芯片(Inter 公司的外部 PHY 芯片)。PHY 芯片通过 MIIM(媒体无关接口管理模块)来连接以太网控制器,因此:
• 当以太网控制器向 PHY 芯片模拟程序发送数据时,PHY 芯片模拟程序控制数据按照协议的进行传输;
• 当 PHY 芯片向以太网控制器发送数据时,外部 PHY 芯片模拟程序首先按照协议要求产生需要传输的数据,然后发送到以太网控制器。
外部 PHY 芯片模拟程序的主要代码如下:
`include "timescale.v"
`include "eth_phy_defines.v"
`include "tb_eth_defines.v"
module eth_phy (m_rst_n_i, mtx_clk_o, mtxd_i, mtxen_i, mtxerr_i, mrx_clk_o, mrxd_o, mrxdv_o,
mrxerr_o,mcoll_o,mcrs_o,mdc_i,md_io,phy_log);
//输入输出信号
input m_rst_n_i;
……
//寄存器和连线
reg control_bit15; // self clearing bit
……
// PHY 芯片模拟程序的 MIIM 部分
……
//初始化
initial
begin
md_io_enable = 1'b0;
respond_to_all_phy_addr = 1'b0;
no_preamble = 1'b0;
end
// 使输出处于三态
assign #1 md_io = (m_rst_n_i && md_io_enable) ? md_io_output : 1' bz ;
//寄存器输入
always@(posedge mdc_i or negedge m_rst_n_i)
begin
if (!m_rst_n_i)
md_io_reg <= #1 0;
else
md_io_reg <= #1 md_io;
end
// 获得 PHY 地址、寄存器地址和数据输入,把需要输出的数据移位输出
// putting Data out and shifting
always@(posedge mdc_i or negedge m_rst_n_i)
begin
if (!m_rst_n_i)
begin
phy_address <= 0;
reg_address <= 0;
reg_data_in <= 0;
reg_data_out <= 0;
md_io_output <= 0;
end
else
begin
if (md_get_phy_address)
begin
phy_address[4:1] <= phy_address[3:0]; // correct address is `ETH_PHY_ADDR
phy_address[0] <= md_io;
end
if (md_get_reg_address)
begin
reg_address[4:1] <= reg_address[3:0];
reg_address[0] <= md_io;
end
if (md_get_reg_data_in)
begin
reg_data_in[15:1] <= reg_data_in[14:0];
reg_data_in[0] <= md_io;
end
if (md_put_reg_data_out)
begin
reg_data_out <= register_bus_out;
end
if (md_io_enable)
begin
md_io_output <= reg_data_out[15];
reg_data_out[15:1] <= reg_data_out[14:0];
reg_data_out[0] <= 1'b0;
end
end
end
assign #1 register_bus_in = reg_data_in; // md_put_reg_data_in - allows writing to a selected
register
// 统计通过 MIIM(媒体无关接口管理模块)传输的数据
always@(posedge mdc_i or negedge m_rst_n_i)
begin
if (!m_rst_n_i)
begin
if (no_preamble)
md_transfer_cnt <= 33;
else
md_transfer_cnt <= 1;
end
else
begin
if (md_transfer_cnt_reset)
begin
if (no_preamble)
md_transfer_cnt <= 33;
else
md_transfer_cnt <= 1;
end
else if (md_transfer_cnt < 64)
begin
md_transfer_cnt <= md_transfer_cnt + 1'b1;
end
else
begin
if (no_preamble)
md_transfer_cnt <= 33;
else
md_transfer_cnt <= 1;
end
end
end
// MIIM 的传输控制
always@(m_rst_n_i or md_transfer_cnt or md_io_reg or md_io_rd_wr orphy_address or respond_to_all_phy_addr or no_preamble)
begin
#1;
while ((m_rst_n_i) && (md_transfer_cnt <= 64))
begin
// 复位信号
// 检查报头
if (md_transfer_cnt < 33)
begin
#4 md_put_reg_data_in = 1'b0;
if (md_io_reg !== 1'b1)
begin
#1 md_transfer_cnt_reset = 1'b1;
end
else
begin
#1 md_transfer_cnt_reset = 1'b0;
end
end
//检查开始位
else if (md_transfer_cnt == 33)
begin
if (no_preamble)
begin
#4 md_put_reg_data_in = 1'b0;
if (md_io_reg === 1'b0)
begin
#1 md_transfer_cnt_reset = 1'b0;
end
else
begin
#1 md_transfer_cnt_reset = 1'b1;
//if ((md_io_reg !== 1'bz) && (md_io_reg !== 1'b1))
if (md_io_reg !== 1'bz)
begin
//错误
`ifdef VERBOSE
$fdisplay(phy_log, "*E (%0t)(%m)MIIM - wrong first start bit (without preamble)",
$time);
`endif
#10 $stop;
end
end
end
else // with preamble
begin
#4 ;
`ifdef VERBOSE
$fdisplay(phy_log, " (%0t)(%m)MIIM - 32-bit preamble received", $time);
`endif
// check start bit only if md_transfer_cnt_reset is inactive, because if
// preamble suppression was changed start bit should not be checked
if ((md_io_reg !== 1'b0) && (md_transfer_cnt_reset == 1'b0))
begin
// 错误
`ifdef VERBOSE
$fdisplay(phy_log, "*E (%0t)(%m)MIIM - wrong first start bit", $time);
`endif
#10 $stop;
end
end
end
else if (md_transfer_cnt == 34)
begin
#4;
if (md_io_reg !== 1'b1)
begin
// 错误
#1;
`ifdef VERBOSE
if (no_preamble)
$fdisplay(phy_log, "*E (%0t)(%m)MIIM - wrong second start bit (without preamble)",
$time);
else
$fdisplay(phy_log, "*E (%0t)(%m)MIIM - wrong second start bit", $time);
`endif
#10 $stop;
end
else
begin
`ifdef VERBOSE
if (no_preamble)
#1 $fdisplay(phy_log, " (%0t)(%m)MIIM - 2 start bits received (without preamble)",$time);
else
#1 $fdisplay(phy_log, " (%0t)(%m)MIIM - 2 start bits received", $time);
`endif
end
end
// 寄存器 op-code
else if (md_transfer_cnt == 35)
begin
#4;
if (md_io_reg === 1'b1)
begin
#1 md_io_rd_wr = 1'b1;
end
else
begin
#1 md_io_rd_wr = 1'b0;
end
end
else if (md_transfer_cnt == 36)
begin
#4;
if ((md_io_reg === 1'b0) && (md_io_rd_wr == 1'b1))
begin
#1 md_io_rd_wr = 1'b1; // reading from PHY registers
`ifdef VERBOSE
$fdisplay(phy_log, " (%0t)(%m)MIIM - op-code for READING from registers", $time);
`endif
end
else if ((md_io_reg === 1'b1) && (md_io_rd_wr == 1'b0))
begin
#1 md_io_rd_wr = 1'b0; // writing to PHY registers
`ifdef VERBOSE
$fdisplay(phy_log, " (%0t)(%m)MIIM - op-code for WRITING to registers", $time);
`endif
end
else
begin
// 操作码错误
`ifdef VERBOSE
#1 $fdisplay(phy_log, "*E (%0t)(%m)MIIM - wrong OP-CODE", $time);
`endif
#10 $stop;
end
// 获得 PHY 地址
begin
#1 md_get_phy_address = 1'b1;
end
end
else if (md_transfer_cnt == 41)
begin
#4 md_get_phy_address = 1'b0;
// set the signal - get register address
#1 md_get_reg_address = 1'b1;
end
// 获得寄存器地址
else if (md_transfer_cnt == 46)
begin
#4 md_get_reg_address = 1'b0;
#1 md_put_reg_data_out = 1'b1;
end
……
// PHY 芯片与以太网控制器之间数据传输的控制
// 寄存器
reg mcoll_o;
……
//初始化所有寄存器
initial
begin
mcrs_rx = 0;
mcrs_tx = 0;
task_mcoll = 0;
task_mcrs = 0;
task_mcrs_lost = 0;
no_collision_in_half_duplex = 0;
collision_in_full_duplex = 0;
no_carrier_sense_in_tx_half_duplex = 0;
no_carrier_sense_in_rx_half_duplex = 0;
carrier_sense_in_tx_full_duplex = 0;
no_carrier_sense_in_rx_full_duplex = 0;
real_carrier_sense = 0;
end
// 数据冲突
always@(m_rst_n_i or control_bit8_0 or collision_in_full_duplex or
mcrs_rx or mcrs_tx or task_mcoll or no_collision_in_half_duplex)
begin
if (!m_rst_n_i)
mcoll_o = 0;
else
begin
if (control_bit8_0[8]) // full duplex
begin
if (collision_in_full_duplex) // collision is usually not asserted in full duplex
begin
mcoll_o = ((mcrs_rx && mcrs_tx) || task_mcoll);
`ifdef VERBOSE
if (mcrs_rx && mcrs_tx)
$fdisplay(phy_log, " (%0t)(%m) Collision set in FullDuplex!", $time);
if (task_mcoll)
$fdisplay(phy_log, " (%0t)(%m) Collision set in FullDuplex from TASK!", $time);
`endif
end
else
begin
mcoll_o = task_mcoll;
`ifdef VERBOSE
if (task_mcoll)
$fdisplay(phy_log, " (%0t)(%m) Collision set in FullDuplex from TASK!", $time);
`endif
end
end
else // half duplex
begin
mcoll_o = ((mcrs_rx && mcrs_tx && !no_collision_in_half_duplex) ||task_mcoll);
`ifdef VERBOSE
if (mcrs_rx && mcrs_tx)
$fdisplay(phy_log, " (%0t)(%m) Collision set in HalfDuplex!", $time);
if (task_mcoll)
$fdisplay(phy_log, " (%0t)(%m) Collision set in HalfDuplex from TASK!", $time);
`endif
end
end
end
//载波监听多路访问
always@(m_rst_n_i or control_bit8_0 or carrier_sense_in_tx_full_duplex or
no_carrier_sense_in_rx_full_duplex or
no_carrier_sense_in_tx_half_duplex or
no_carrier_sense_in_rx_half_duplex or
mcrs_rx or mcrs_tx or task_mcrs or task_mcrs_lost)
begin
if (!m_rst_n_i)
mcrs_o = 0;
else
begin
if (control_bit8_0[8]) // full duplex
begin
if (carrier_sense_in_tx_full_duplex) // carrier sense is usually not asserted duringTX in full duplex
mcrs_o = ((mcrs_rx && !no_carrier_sense_in_rx_full_duplex) ||
mcrs_tx || task_mcrs) && !task_mcrs_lost;
else
mcrs_o = ((mcrs_rx && !no_carrier_sense_in_rx_full_duplex) ||
task_mcrs) && !task_mcrs_lost;
end
else // half duplex
begin
mcrs_o = ((mcrs_rx && !no_carrier_sense_in_rx_half_duplex) ||
(mcrs_tx && !no_carrier_sense_in_tx_half_duplex) ||
task_mcrs) && !task_mcrs_lost;
end
end
end
// 以太网控制器发送数据控制,PHY 芯片接收数据
//寄存器
reg [7:0] tx_mem [0:4194303]; // 4194304 是 22 位地址线所能提供的所有地址,每个地址是 8位
……
//发送数据控制
always@(posedge mtx_clk_o)
begin
// 保存数据并进行基本的帧数据检查
if (!m_rst_n_i)
begin
tx_cnt <= 0;
tx_preamble_ok <= 0;
tx_sfd_ok <= 0;
tx_len <= 0;
tx_len_err <= 0;
end
else
begin
if (!mtxen_i)
begin
tx_cnt <= 0;
end
else
begin
//发送四位字节数据的计数器
tx_cnt <= tx_cnt + 1;
//设置初始化值,检查第一个四位字节数据的报头
if (tx_cnt == 0)
begin
`ifdef VERBOSE
$fdisplay(phy_log, " (%0t)(%m) TX frame started with tx_en set!", $time);
`endif
if (mtxd_i == 4'h5)
tx_preamble_ok <= 1;
else
tx_preamble_ok <= 0;
tx_sfd_ok <= 0;
tx_byte_aligned_ok <= 0;
tx_len <= 0;
tx_len_err <= 0;
end
// 检查报头
if ((tx_cnt > 0) && (tx_cnt <= 13))
begin
if ((tx_preamble_ok != 1) || (mtxd_i != 4'h5))
tx_preamble_ok <= 0;
end
// 检查 SFD
if (tx_cnt == 14)
begin
`ifdef VERBOSE
if (tx_preamble_ok == 1)
$fdisplay(phy_log, " (%0t)(%m) TX frame preamble OK!", $time);
else
$fdisplay(phy_log, "*E (%0t)(%m) TX frame preamble NOT OK!", $time);
`endif
if (mtxd_i == 4'h5)
tx_sfd_ok <= 1;
else
tx_sfd_ok <= 0;
end
if (tx_cnt == 15)
begin
if ((tx_sfd_ok != 1) || (mtxd_i != 4'hD))
tx_sfd_ok <= 0;
end
// 控制存储地址数据、类型/长度、数据内容和 FCS 到发送数据缓冲区
if (tx_cnt > 15)
begin
if (tx_cnt == 16)
begin
`ifdef VERBOSE
if (tx_sfd_ok == 1)
$fdisplay(phy_log, " (%0t)(%m) TX frame SFD OK!", $time);
else
$fdisplay(phy_log, "*E (%0t)(%m) TX frame SFD NOT OK!", $time);
`endif
end
if (tx_cnt[0] == 0)
begin
tx_mem_data_in[3:0] <= mtxd_i; // storing LSB nibble
tx_byte_aligned_ok <= 0; // if transfer will stop after this, then there was driblenibble
end
else
begin
tx_mem[tx_mem_addr_in[21:0]] <= {mtxd_i, tx_mem_data_in[3:0]}; // storing data into
tx memory
tx_len <= tx_len + 1; // enlarge byte length counter
tx_byte_aligned_ok <= 1; // if transfer will stop after this, then transfer is byte
alligned
tx_mem_addr_in <= tx_mem_addr_in + 1'b1;
end
if (mtxerr_i)
tx_len_err <= tx_len;
end
end
end
//为发送数据产生载波信号
if (!m_rst_n_i)
begin
mcrs_tx <= 0;
mtxen_d1 <= 0;
mtxen_d2 <= 0;
mtxen_d3 <= 0;
mtxen_d4 <= 0;
mtxen_d5 <= 0;
mtxen_d6 <= 0;
end
else
begin
mtxen_d1 <= mtxen_i;
mtxen_d2 <= mtxen_d1;
mtxen_d3 <= mtxen_d2;
mtxen_d4 <= mtxen_d3;
mtxen_d5 <= mtxen_d4;
mtxen_d6 <= mtxen_d5;
if (real_carrier_sense)
mcrs_tx <= mtxen_d6;
else
mcrs_tx <= mtxen_i;
end
end
`ifdef VERBOSE
reg frame_started;
initial
begin
frame_started = 0;
end
always@(posedge mtxen_i)
begin
frame_started <= 1;
end
always@(negedge mtxen_i)
begin
if (frame_started)
begin
$fdisplay(phy_log, " (%0t)(%m) TX frame ended with tx_en reset!", $time);
frame_started <= 0;
end
end
always@(posedge mrxerr_o)
begin
$fdisplay(phy_log, " (%0t)(%m) RX frame ERROR signal was set!", $time);
end
`endif
……
endmodule
4.3 仿真结果
如图 13 所示是对全双工方式下传输数据的测试,图中加亮的 MTxD 是以太网控制器的数据输出。
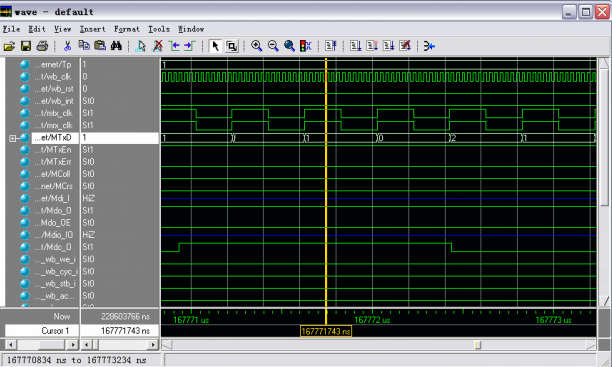
图 13 全双工模式下发送数据的测试结果
如图 14 所示的是全双工模式下接收数据的测试,图中加亮的 MRxD 是以太网控制器接收数据的输入。
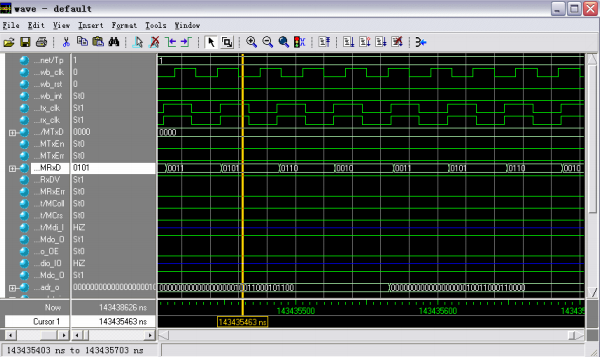
图 14 全双工模式下接收数据的测试结果
如图 15 所示的是全双工模式下数据发送和接收整个过程的测试结果,图中加亮的 MTxD和 MRxD 是以太网控制器发送数据和接收数据的输出和输入端口。
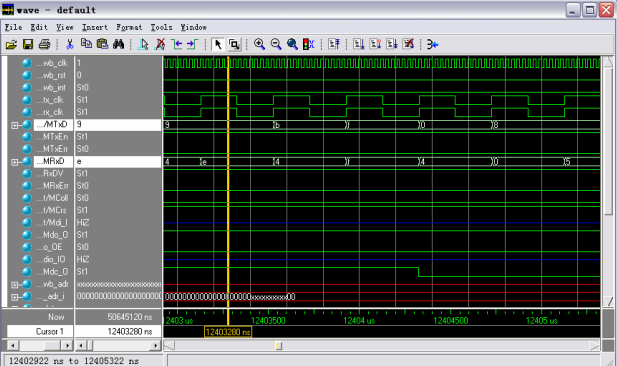
图 15 全双模式下数据发送和接收全过程的测试结果
如图 16 所示的是半双工模式下发送和接收数据全过程的测试结果。
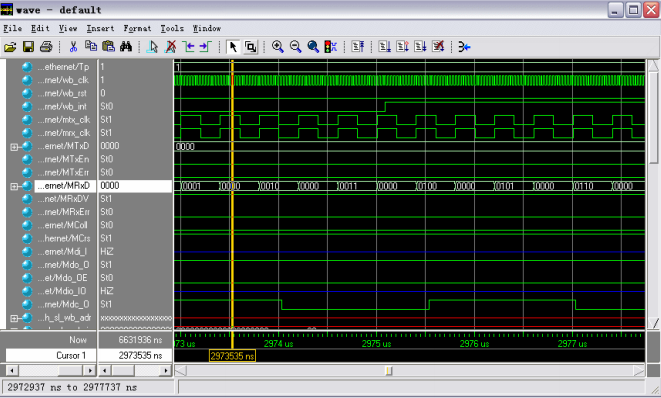
图16 半双工模式下发送和接收数据全过程的测试结果
五、总结
本篇介绍了一个以太网控制器(MAC)的实例。首先介绍了以太网的基本原理,然后介绍了以太网控制器程序的主要结构和主要功能模块的实现过程。最后用一个测试程序验证程序的功能是否满足要求。本章为读者设计自己的以太网控制器提供了一个有用的方案,并且有助于加深对以太网协议的理解。
审核编辑:刘清
-
FPGA
+关注
关注
1664文章
22553浏览量
640500 -
Mac
+关注
关注
0文章
1131浏览量
55635 -
PHY
+关注
关注
2文章
341浏览量
54420 -
TCPIP协议栈
+关注
关注
0文章
6浏览量
6251 -
以太网控制器
+关注
关注
0文章
52浏览量
13212
原文标题:往期精选:基于FPGA的以太网控制器设计(附代码)
文章出处:【微信号:HXSLH1010101010,微信公众号:FPGA技术江湖】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
基于Xilinx FPGA的千兆以太网控制器的开发

采用多种工业以太网标准的单个FPGA平台设计
请问怎样去设计嵌入式以太网控制器?
基于FPGA的以太网MAC子层协议设计实现
万兆以太网MAC层控制器设计

基于FPGA的以太网MAC控制器的设计与实现

Microchip以太网开关和EtherCAT工业控制器及MAC PHY控制设计解决方案
通过FPGA实现一个以太网控制器MAC的实例



评论