 精确的高边电流检测放大器监视PWM负载电流
精确的高边电流检测放大器监视PWM负载电流
精确的高边电流检测对于电动助力转向、自动换档、变速箱控制、发动机燃油喷射控制、制动阀控制和主动悬架等汽车控制系统至关重要。所有这些应用都需要精确调节通过电机或螺线管的电流,以控制电机的扭矩或螺线管的驱动。本文介绍的电路包括一个精密、高边电流检测放大器(MAX9918),用于监测宽输入共模电压范围内的感性负载电流。它适用于输入共模电压可能因感应反冲、电池反接条件或瞬态事件而变为负的应用。
电动助力转向 (EPS) 系统中的电流检测
与传统的动力转向系统不同,EPS系统不包括液压泵或流体。相反,它具有通过齿轮机构连接到转向齿条的电动机。当驾驶员转动方向盘时,转向传感器会检测车轮的位置和旋转速度。该信息与安装在转向轴上的转向扭矩传感器的输入一起馈送到动力转向控制模块。为了确定所需的转向辅助,控制模块还从车速传感器、牵引力控制和稳定控制系统获取输入(图 1)。
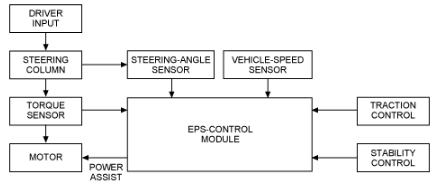
图1.典型EPS系统的简化框图。
然后,与电源模块的接口允许控制模块调节电机中的电流量。增加电机电流会增加动力辅助,反之亦然。电机电流通常通过使用 H 桥电路在电机上馈送脉宽调制 (PWM) 电压来控制(图 2)。相关的真值表(表1)总结了全H桥电路的各种工作模式。电机呈现感性负载,因此扭矩是通过平均产生的纹波电流(即提供给驱动器的动力辅助)来确定的。
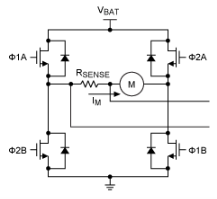
图2.该H桥电路的四个栅极的信号相位决定了电机的方向和速度。
| Φ1A | Φ1B | Φ2A | Φ2B | 条件 |
| 上 | 上 | 关闭 | 关闭 | 电机在V之间供电.BAT和接地及其电流IM增加和流动,如箭头所示。 |
| 关闭 | 上 | 关闭 | 上 | 当前的IM如箭头所示流动,但通过Φ1B、Φ2B和检测电阻减小并循环。 |
| 关闭 | 关闭 | 上 | 上 | 电机在V之间供电.BAT和接地,及其电流IM增加并沿与箭头相反的方向流动。 |
| 关闭 | 上 | 关闭 | 上 | 当前的IM以与箭头相反的方向流动。它还通过Φ2B、Φ1B和检测电阻减小并循环。 |
电流测量装置监控电机电流并向控制模块提供实时反馈,允许该模块调整PWM占空比,直到电流达到其目标值。测量电机电流的一种常用方法是插入一个与电流路径串联的低值检测电阻,这会产生很小的压降。该差分电压由电流检测放大器放大,以指示电流幅度。
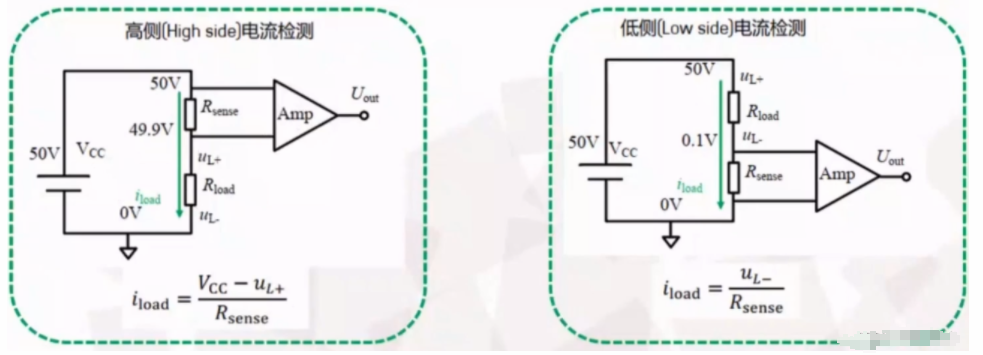
电流检测有三种选择:低压侧、高压侧和电机上。因此,您可以将检测电阻放置在 H 桥和接地之间(低侧电流检测)、直流母线底部或正极电池端子和 H 桥之间(高压侧电流检测),或者放置在直流总线或电机本身的高侧(输出电机 PWM 电流检测)。这些替代方案需要不同的权衡。低边方法很方便,但在接地路径中增加了不需要的电阻,并且缺乏检测接地短路故障的诊断能力。无论是高端还是低端方法,都不能连续监测再循环二极管中的电流。然而,PWM电流检测没有这些缺点。
PWM电流测量电路看似简单,但它带来的性能限制远非微不足道。电路必须应对从地到电池电压一路摆动的共模电压。因此,为了抑制共模偏移,电路不仅必须具有与该摆幅相对应的高输入电压范围,而且还必须在开关频率和边沿速率引起的相关频率下具有出色的CMRR。
PWM信号的共模瞬变和最小占空比也对电流检测放大器的建立时间提出了严格的要求。为了实现精确的线性响应,电流测量电路必须具有高增益、高精度和低失调电压。由于人为干预是控制回路的一部分,因此线性度和准确性尤其重要。电路中的任何非线性都会在车辆过度转向时引起振荡或振动,从而损害驾驶体验。
在图3所示的电机电流控制和测量电路中,电机以全H桥配置连接,由于施加的电压极性很容易反转,因此可以沿任一方向旋转。所示IC可承受-20V至+75V的共模电压,使其不受电感反激、抛负载瞬变和电池反向故障的影响。该器件还集成了一个仪表放大器,其获得专利的间接电流反馈架构可提供精密电流检测,输入失调电压为 400μV (最大值),增益误差为 0.6% (最大值)。外部基准电压支持全H桥所需的双向电流检测,以及使用半H桥电路时所需的单向电流检测。在双向应用中,当检测电流为零时,输出电压等于基准电压。可调增益和固定增益特性使该器件能够在各种应用中提供最大的灵活性。
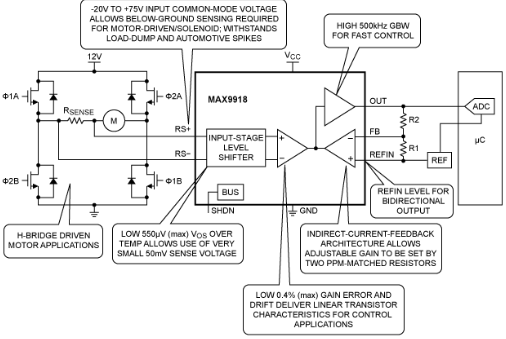
图3.PWM兼容的H桥电流检测电路。
电磁阀驱动的电流检测
螺线管被广泛用作车辆中的机电开关。例如,起动电磁阀向起动电机提供大电流,进而使发动机运动。然而,一些汽车控制系统采用电磁阀驱动器进行精确控制。例如,铁路的普通柴油发动机系统依赖于电磁阀作为复杂的电子控制阀,在高压下将适量的燃料直接喷射到各个发动机气缸中。这些气门的正时由发动机控制单元精确控制,以确保与柴油发动机同步。结果是一个相对“绿色”的发动机,噪音更小,产生更少的排放,并且更省油。电磁阀控制的其他应用包括自动换档、变速箱控制、制动控制和主动悬架。
高端开关通常是一个 FET,其栅极由 PWM 信号控制(图 4)。当 FET 导通时,它将电磁阀连接到 14V 电池电压,产生为电磁线圈充电的电流。当 FET 关闭时,电磁阀电流通过箝位二极管和分流电阻器放电。PWM频率和占空比的调节决定了螺线管中产生的平均纹波电流,进而控制施加到执行器的力。
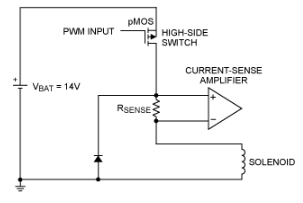
图4.这种典型的电磁阀驱动电路采用高边分流器。
为了调节PWM频率和占空比而检测电磁阀电流的挑战与H桥应用中的挑战相似。电流检测放大器输入端的共模电压范围从电池电压到箝位二极管压降的略微负电平。典型的螺线管需要几安培的电流,因此承受这种电流的箝位二极管可能会产生高于1V的正向电压。
同样,电流检测放大器的宽输入共模范围和响应共模变化的快速建立非常适合此应用。该应用与H桥的主要区别在于,螺线管电流始终沿同一方向流动,因此电流检测放大器只需要是单向的。(MAX9918当其基准输入(REFIN)接地时变为单向电流检测放大器。
实验室结果
图5显示了在实验室中原型化的螺线管的典型应用电路。电磁阀由一个 2mH 电感器仿真,ESR 低至 1.6Ω。检测电阻为100mΩ,R4值为15Ω,将最大电磁阀电流限制为:
IMAX = VBAT/(RSENSE + ESR + R4) = 12V/(0.1 + 1.6 + 15)Ω = 0.72A
(请注意,R4 不存在于实际的电磁阀电路中。
该最大电流值是电感完全充电时达到的理论极限。所示的电阻和电感值将电路时间常数设置为约0.12ms,相当于约8.3kHz。增益 80 由外部电阻 R1 = 1kΩ 和 R2 = 79kΩ 设置。
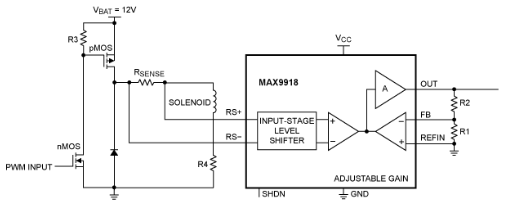
图5.该电磁阀驱动电路是在实验室中原型设计的。
图5电路的工作用5kHzPWM频率下的波形说明,占空比分别为80%(图6)和50%(图7)。顶部波形是R4两端的电压,与电感中流动的电流成正比。中间波形是检流放大器的输出,底部波形表示PFET漏极处的PWM信号。正如人们所期望的那样,更高的占空比会产生更高的电流。
图6.图 5 中的波形,具有 5kHz PWM 频率和 80% 占空比。(顶部迹线是R4两端的电压,中间是电流检测放大器的输出,底部是pFET底部的PWM信号。
图7.图5所示的波形,具有5kHz PWM频率和50%占空比。(顶部迹线是R4两端的电压,中间是电流检测放大器的输出,底部是pFET底部的PWM信号。
因此,精密高压、高边电流检测放大器(如MAX9918)允许使用更小的检测电阻进行精确测量。它处理来自 H 桥的双向电机电流,如 EPS 系统中的电流,以及自动换档、变速箱控制、制动控制和主动悬架中的单向电磁阀电流。
审核编辑:郭婷
-
传感器
+关注
关注
2552文章
51383浏览量
756118 -
放大器
+关注
关注
143文章
13627浏览量
214082 -
PWM
+关注
关注
114文章
5197浏览量
214690
发布评论请先 登录
相关推荐
MAX9928F/MAX9929F 高边电流检测放大器






 工商网监
工商网监
评论