 基于电压型磁链观测器的异步电机矢量控制学习
基于电压型磁链观测器的异步电机矢量控制学习
导读:本期主要介绍电压型磁链观测器(voltage flux observer)在静止坐标系下的表现形式,应用在异步电机矢量控制系统中。
一、引言
磁链估计是高性能交流感应电机调速系统中的重要组成部分。而磁链在实际应用中一般不用传感器直接检测,所以现代交流电力传动控制系统常用磁链估计模型来估算磁链。在电机运行过程中,要考虑磁饱和、温度等干扰信号对电机参数造成偏差的影响,所以如何在电机全速范围内获得准确的磁链即提高磁链观测器的参数鲁棒性成为众多学者的研究内容。
转子磁链观测器利用定子电压、定子电流或转子转速信号观测出转子磁链的相位和幅值。如果转子磁链的相位观测不准,那么定子电流的励磁分量与转矩分量就不能实现完全的解耦,可能会造成系统的振荡甚至不稳定。如果观测出转子磁链的幅值偏大,会使得电机运行在弱磁状态,减小电机的带载能力;如果观测出转子磁链的幅值偏小,会导致过大的励磁电流,使电机的铁心饱和,严重时还会导致绕组过热而烧坏电机。因此决定整个矢量控制系统性能优劣的最为关键环节就是转子磁链观测器。
二、电压型转子磁链观测器
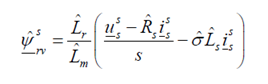
在静止坐标系下基于电压模型的转子磁链向量表达式如下:
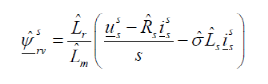
从上式可以发现电压型观测器具有以下特点:
(1)该模型与转子电阻Rr无关,且不需要电机转速 信息,适合用于无速度传感器矢量控制;
(2)包含一纯积分项,被积项的初始相位与直流偏置都会影响积分结果;
(3)低速时观测器性能较差。因为低速时给定的定子电压幅值小,电机端电压难以精确获得,定子电阻的阻值在运行过程中又会发生变化,使得被积项产生明显的相对误差。
针对电压模型磁链观测器包含纯积分环节和低速性能差的问题,主要有三个改进措施:
(1) 采用其他环节来替换纯积分环节,例如用一阶低通滤波环节,针对一阶低通滤波环节会带来幅值和相位的误差以及无法消除直流偏置影响的问题,现有文献提出了许多改进型的积分器;
(2)对逆变器的非线性误差电压进行补偿。逆变器的驱动信号中存在的死区时间、开关管的导通压降和开通关断时间都会使得逆变器的参考电压和实际输出电压产生一定误差,尤其在低速时,由于给定电压的幅值小,重构的定子电压与实际值的相对误差变得尤为明显。如何尽可能地减少给定电压与逆变器输出实际电压的误差不单是电压模型磁链观测器的问题,这是所有用到定子电压的磁链观测器共性问题。
(3)加入定子电阻的在线辨识,使得在控制系统的运行过程中定子电阻参数能够跟随其实
际值变化。
三、模型搭建
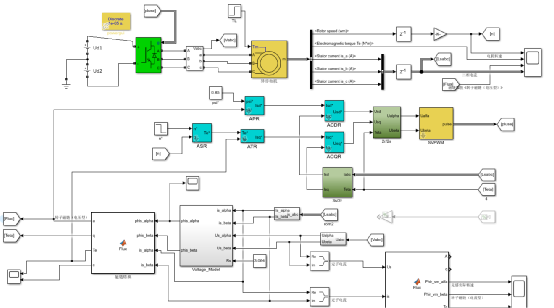
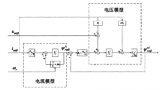
图1 基于电压模型的异步电机矢量控制系统仿真
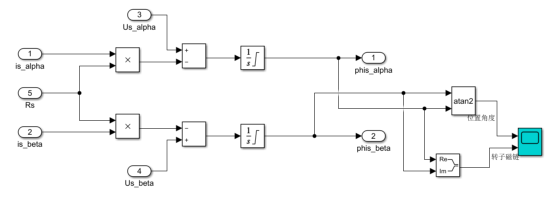
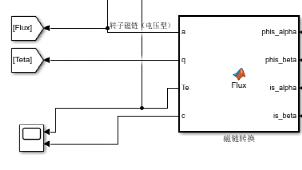
图2 电压型转子磁链观测器模型搭建
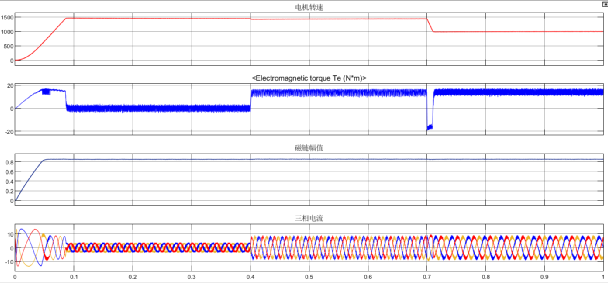
图3 仿真波形变化情况
四、总结
传统的电压型磁链观测器包含纯积分环节,在低速区域存在初始值问题和直流偏置的问题,对电机参数敏感。针对这些问题,下期文章将介绍一种滤波器串联的方法来替换纯积分环节来解决初始值误差和直流偏置的问题。
审核编辑:汤梓红
-
控制系统
+关注
关注
41文章
6542浏览量
110472 -
电机
+关注
关注
142文章
8929浏览量
145078 -
异步电机
+关注
关注
6文章
427浏览量
32817 -
矢量控制
+关注
关注
2文章
284浏览量
32170 -
磁链观测器
+关注
关注
0文章
9浏览量
1376
原文标题:基于电压型磁链观测器的异步电机矢量控制学习1
文章出处:【微信号:浅谈电机控制,微信公众号:浅谈电机控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
异步电机无感控制中,观测器在观测磁链时需要用到转速信息,而在速度估计时有需要用到磁链的信息,这样不矛盾吗?
交流异步电机矢量控制之simulink仿真搭建

基于电流型磁链观测器的异步电机矢量控制学习





 工商网监
工商网监
评论