 工业运动控制的测量技术
工业运动控制的测量技术
工业运动控制涵盖了广泛的应用,从基于逆变器的风扇或泵控制,到具有更复杂的交流驱动控制的工厂自动化,再到具有复杂伺服控制的机器人等高级自动化应用。这些系统需要对许多变量进行检测和反馈,例如电机绕组电流或电压、直流母线电流或电压、转子位置和速度。变量的选择和所需的测量精度取决于最终应用需求、系统架构、目标系统成本或系统复杂性,以及其他考虑因素,例如状态监测等增值功能。据报道,电机消耗了全球40%的能源,国际法规增加了对整个工业运动应用的系统效率的关注,增加了这些变量的重要性,尤其是电流和电压。
本文重点介绍根据电机额定功率、系统性能要求和最终应用,在各种电机控制信号链拓扑中进行电流和电压检测。在这种情况下,电机控制信号链的实现因传感器选择、电流隔离要求、模数转换器(ADC)选择、系统集成以及系统电源和接地分区而异。
工业驱动应用范围
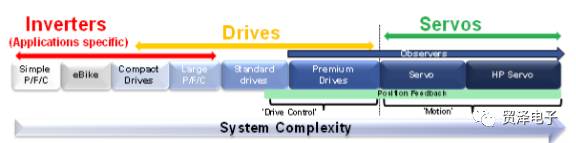
电机控制应用的范围从简单的逆变器到复杂的伺服驱动器,但都包括具有功率级的电机控制系统,以及驱动具有不同检测和反馈水平的脉宽调制器(PWM)模块的处理器。应用范围的简化视图如图1所示,说明了随着从左到右移动而变得越来越复杂的系统,从泵、风扇和压缩机等简单的控制系统到无需精确反馈即可实现的系统,只需使用简单的微处理器。随着系统复杂性的增加,向频谱的高端发展,复杂的控制系统需要精确的反馈和快速的通信接口。例如感应电机或永磁电机的有传感器或无传感器矢量控制,以及专为提高效率而设计的高功率工业驱动器——如图 1 所示为大型泵、风扇和压缩机。在频谱的最高端,复杂的伺服驱动器用于机器人、机床和拾取和放置机器等应用。随着系统变得更加复杂,变量的传感和反馈变得更加重要。
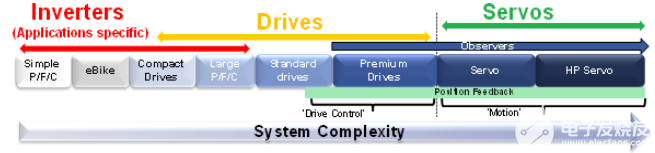
图1.工业驱动应用范围。
驱动器体系结构 — 系统分区
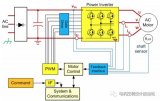
设计系统以应对工业运动控制领域的各种应用存在许多挑战。通用电机控制信号链如图2所示。
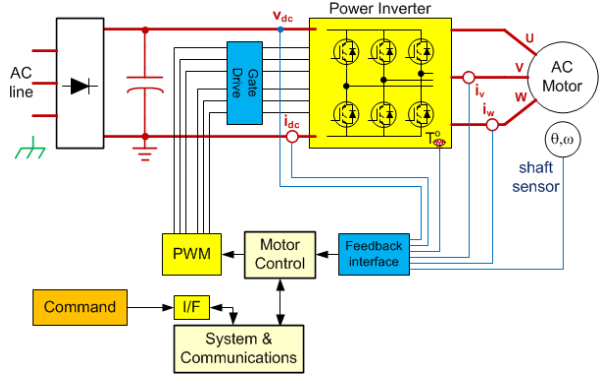
图2.通用电机控制信号链。
关键问题是隔离要求,这些要求通常会对最终的电路拓扑和架构产生重大影响。有两个关键因素需要考虑:为什么隔离和在哪里隔离。
所需的隔离分类将由前者决定。要求可以是高压安全隔离(SELV)以防止人为电击,或功能隔离以在非致命电压之间进行电平转换,或用于数据完整性和噪声缓解目的的隔离。隔离位置通常由预期的系统性能决定。电机控制通常是一个恶劣的电气噪声环境,设计通常会遇到几百伏的大共模电压,可能以超过20 kHz的频率切换,瞬态dv/dt上升时间非常高。出于这个原因,无论是高性能系统还是高功率固有噪声较大的系统,通常都会将功率级与控制级隔离。设计采用单处理器还是双处理器方法也会影响隔离位置。在性能较低且功耗较低的系统中,通常在数字通信接口处隔离,这意味着电源和控制级具有相同的电位。低端系统具有较低带宽的通信接口进行隔离。传统上,由于传统隔离技术所需的高带宽和局限性,隔离高端系统中的通信接口一直具有挑战性,但随着磁隔离CAN和RS-485收发器产品的出现,这种情况正在发生变化,例如 www.analog.com/ iCoupler提供的ADI公司的产品。
高性能闭环电机控制设计中的两个关键要素是PWM调制器输出和电机相电流反馈。图3a和3b说明了需要安全隔离的位置,具体取决于控制级是与功率级共享相同的电位,还是以接地为参考。无论哪种情况,都需要隔离高端栅极驱动器和电流检测节点,但隔离等级不同——在图3a中,只需要对这些节点进行功能隔离,而在图3b中,这些节点的人身安全(即电流)隔离至关重要。
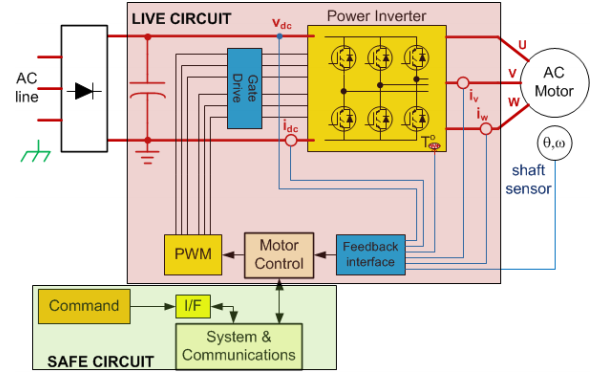
图 3a. 以功率级为参考的控制级。

图 3b. 以地球为基准的控制级。
电流和电压检测的测量技术和拓扑
用于检测电流和电压的信号链实现因传感器选择、电流隔离要求、ADC选择和系统集成以及系统电源和接地分区而异,如前所述。实现高保真测量的信号调理并非易事。例如,在这种嘈杂的环境中恢复小信号或传输数字信号具有挑战性,而隔离模拟信号则更具挑战性。在许多情况下,信号隔离电路会引入相位延迟,从而限制系统动态性能。相电流检测尤其具有挑战性,因为该节点与功率级(逆变器模块)中心内的栅极驱动器输出连接到同一电路节点,因此在隔离电压和开关瞬变方面具有相同的要求。确定要在电机控制系统中实现的测量信号链(技术、信号调理和ADC)取决于三个关键因素:
系统中的点或节点,因为这决定了需要测量的内容。
电机的功率水平和由此产生的传感器选择——是否是固有隔离的。传感器的选择对ADC的选择有重大影响,包括转换器架构、功能和模拟输入范围。
最终应用程序。这可能会推动检测信号链中对高分辨率、高精度或速度的需求。例如,在较宽的速度范围内实现无传感器控制,需要更频繁地进行更多测量和更高的精度。最终应用也会影响对ADC功能的需求。例如,多轴控制可能需要更高的通道数ADC。
电流和电压传感器
电机控制中最常用的电流传感器是分流电阻器、霍尔效应 (HE) 传感器和电流互感器 (CT)。虽然分流电阻器不提供隔离,并且在较高电流下会产生损耗,但它们是所有传感器中线性最强的,成本最低,适用于交流和直流测量。限制分流功率损耗所需的信号电平降低通常会将分流应用限制在50 A或更低。CT和HE传感器提供固有的隔离,允许它们服务于高电流系统,但由于传感器本身的初始精度较差或温度范围内的精度较差,因此它们的成本更高,并且导致解决方案的精度低于通过分流电阻器可以实现的解决方案。
电机电流测量位置和拓扑
除了传感器类型之外,还有几个电机电流测量节点可供选择。平均直流母线电流可用于控制目的,但在更高级的驱动器中,电机绕组电流用作主要反馈变量。直接相绕组电流测量是理想的选择,用于高性能系统。但是,可以使用每个下部逆变器支路中的分流器或直流母线中的单个分流器间接测量绕组电流。这些方法的优点是分流信号都以电源共通为基准,但从直流链路提取绕组电流需要将采样同步到PWM开关。可以使用上述任何电流检测技术进行直接相绕组电流测量,但分流电阻信号必须隔离。高共模放大器可以提供功能隔离,但人体安全隔离必须由隔离放大器或隔离调制器提供。
图4显示了上述各种电流反馈选项。虽然控制反馈只需要其中一个选项,但直流母线电流信号可用作保护的备用信号。
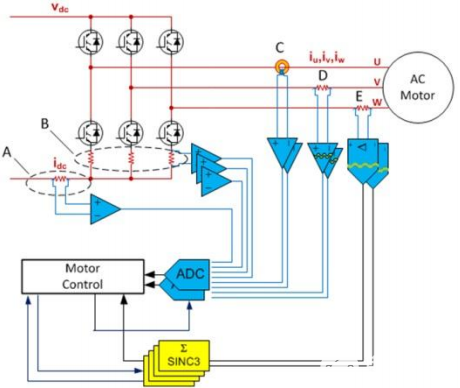
图4.隔离和非隔离电机电流反馈。
如前所述,系统电源和接地分区将确定所需的隔离分类,从而确定哪些反馈选项是合适的。系统目标性能也会影响传感器的选择或测量技术。有许多配置可以在性能范围内实现。
性能较低的示例:功率级和控制级位于公共电位上,检测选项 A 或 B
Using leg shunts is one of the most economical techniques to measure motor current. In this example, where the power stage shares the same potential as the control stage, there is no common mode to be dealt with and the outputs from option A or B can connect directly to the signal conditioning circuitry and ADC. This type of topology would generally be found in a low power and low performance system with the ADC embedded in the microprocessor.
Higher Performance Example: Control Stage Connected to Earth, Sensing Option C, D, or E
In this example, human safety isolation is required. Sensing options C, D, and E are all possible. Option E provides the highest quality current feedback of all three options and, being a higher performance system, it is likely that there is an FPGA or other form of processing in the system that can provide the digital filter for the isolated modulator signal. The ADC choice for option C, the isolated sensor (likely closed loop HE), would traditionally be discrete to achieve higher performance than that possible with embedded ADC offerings to date. Option D is an isolated amplifier in this configuration, vs.a common-mode amplifier, as safety isolation is required. An isolated amplifier will limit performance, and so an embedded ADC solution may suffice. This will provide the lowest fidelity current feedback compared to options C or E, and while an embedded ADC may be perceived as “free”and the isolated amplifier potentially “cheap,” the implementation usually requires additional components for offset compensation and level shifting for ADC input range matching, increasing the overall signal chain cost.
There are many topologies that can be used in motor control design to sense motor current with many factors to consider such as cost, power level, and performance level. A key objective for most system designers is to improve the current sense feedback in order to improve efficiency within their cost targets. For higher end applications, current feedback is critical to other system performance measures such as dynamic response, acoustic noise, or torque ripple, not just efficiency. It is evident that there is a continuum of performance running from low to high across the various topologies available and this is coarsely mapped out in Figure 5 illustrating both lower power and higher power options.
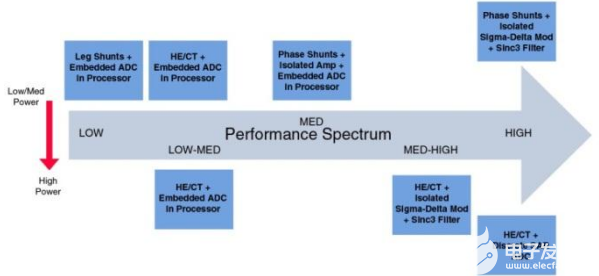
图5.电流检测拓扑性能范围。
电机控制系统设计人员的目标、需求和由此产生的趋势:从 HE 传感器迁移到分流电阻器
分流电阻器与隔离式Σ-Δ调制器耦合,可提供最高质量的电流反馈,其中电流水平足够低,适合分流使用。系统设计人员有一个显著的趋势是从HE传感器迁移到分流电阻,另一个趋势是转向隔离式调制器方法,而不是隔离式放大器方法。仅更换传感器即可降低物料清单 (BOM) 和 PCB 插入成本,并提高传感器精度。分流电阻器对磁场或机械振动不敏感。通常,系统设计人员用分流电阻代替HE传感器时,可能会选择隔离放大器,并继续使用以前在基于HE传感器的设计中使用的ADC来限制信号链的变化水平。但是,如前所述,无论ADC性能如何,隔离放大器的性能都会受到限制。
进一步用隔离式Σ-Δ调制器代替隔离放大器和ADC将消除性能瓶颈,并大大改善设计,通常将其从9位至10位质量反馈变为12位电平。模拟过流保护(OCP)电路也可以被淘汰,因为处理Σ-Δ调制器输出所需的数字滤波器也可以配置为实现快速OCP环路。因此,任何BOM分析不仅应包括隔离放大器、原始ADC和它们之间的信号调理,还应包括可能被淘汰的OCP器件。AD7401A隔离式Σ-Δ调制器基于ADI耦合器技术,差分输入范围为±250 mV(通常用于OCP的±320 mV满量程),非常适合阻性分流测量。模拟输入由模拟调制器连续采样,输入信息以数据速率高达20 MHz的密度包含在数字输出流中。原始信息可以用适当的数字滤波器重建,通常是Sinc。®3用于精密电流测量的滤波器。由于转换性能可以与带宽或滤波器群延迟进行权衡,因此更粗糙、更快的滤波器可以提供2μs量级的快速响应OCP,非常适合IGBT保护。
要求减小分流电阻器尺寸
从信号测量方面来看,分流电阻器选择存在一些关键挑战,因为在灵敏度和功耗之间需要权衡。较大的电阻值将确保使用Σ-Δ调制器的整个范围或尽可能多的模拟输入范围,从而最大化动态范围。然而,较大的电阻值也会导致电压降和效率降低,因为 I2电阻的× R损耗。使用较大的电阻器时,通过自热效应实现非线性也可能是一个挑战。因此,系统设计人员面临着权衡取舍的问题,而选择能够为不同电流水平的许多型号和电机提供服务的分流器尺寸是常见的需求,这进一步加剧了这种情况。面对可能是电机额定电流几倍的峰值电流以及需要可靠地捕获两者,保持动态范围也具有挑战性。系统开启时控制峰值电流的能力因设计而异,从严格控制(例如,高于标称值30%)到高达标称电流的10倍。峰值电流也是由加速度和负载或扭矩变化引起的。然而,在驱动设计中,系统中的峰值电流通常为标称电流的4倍。
面对这些挑战,系统设计人员正在寻找具有更宽动态范围或改进信噪比和失真比(SINAD)的卓越Σ-Δ调制器。迄今为止,隔离式Σ-Δ调制器产品已提供16位分辨率和高达12位有效位数(ENOB)的保证性能。

随着在低功耗驱动器中转向使用分流电阻器,电机驱动器制造商也希望提高驱动器的额定功率,出于性能和成本原因,可以使用这种拓扑结构。这只能通过使用小得多的分流电阻来实现,这需要出现更高性能的调制器内核来解析信号幅度减小的问题。
系统设计人员,尤其是伺服设计人员,也在不断寻求通过缩短模数转换时间或通过与隔离式Σ-Δ调制器和分流电阻拓扑相关的数字滤波器减少群延迟来改善系统响应。如前所述,转换性能可以与带宽或滤波器群延迟进行权衡。更粗糙、更快的滤波器可以提供更快的响应,但以牺牲性能为代价。系统设计人员分析滤波器长度或抽取率的影响,然后根据其最终应用需求做出权衡。提高调制器的时钟速率会有所帮助,但许多设计人员已经以AD7401A可接受的20 MHz最大时钟速率工作。提高时钟速率的缺点之一是潜在的辐射和干扰(EMI)效应。在相同时钟速率下,更高性能的调制器将改善群延迟与性能的权衡,从而缩短响应时间,同时减少对性能的影响。
业界性能最高的隔离式Σ-Δ调制器
很明显,更高性能的隔离式Σ-Δ调制器将支持工业电机控制设计中的多种需求和趋势,并通过减小分流电阻器尺寸来提高电机驱动器的功率效率;改进的无传感器控制方案;实现高效内部永磁电机 (IPM) 的控制。ADI公司的AD7403是AD7401A的下一代产品,在20 MHz的相同外部时钟速率下提供更宽的动态范围。这允许更灵活的分流器尺寸选择,优化驱动器与电机的匹配,改进标称电流和峰值电流测量,减少单个分流器尺寸对一系列电机型号的影响,并允许在更高电流水平下使用分流电阻代替HE传感器。通过减少测量延迟,还可以改善动态响应。AD7403还具有更高连续工作电压(VIORM),比上一代AD7400A和AD7401A,通过使用更高的直流总线电压,从而降低电机电流,也有助于提高系统效率。
更广泛的系统解决方案,包括ADSP-CM40x混合信号控制处理器
如前所述,Σ-Δ调制器的实现需要在系统中使用数字滤波器。传统上,这是通过FPGA或数字ASIC实现的。ADSP-CM408F混合信号控制处理器的问世,该处理器包括硬件Sinc。3AD740x系列隔离式Σ-Δ调制器可以直接连接的滤波器,可能会提高电阻分流检测技术与隔离式Σ-Δ调制器的采用率。如前所述,由于数字域中的系统复杂性和相关(FPGA)成本更高,这种技术传统上被认为是昂贵的。ADSP-CM408F是一种经济高效的解决方案,应使许多设计人员能够考虑电阻分流检测,而这些设计人员以前受成本目标的限制。
审核编辑:郭婷
-
滤波器
+关注
关注
161文章
7835浏览量
178293 -
电机控制
+关注
关注
3536文章
1880浏览量
268908 -
逆变器
+关注
关注
285文章
4728浏览量
207042
发布评论请先 登录
相关推荐
适用于工业运动控制的测量技术

适用于工业运动控制的测量技术
隔离技术在可靠工业测量的应用
求一种工业运动控制系统方案
Trinamic运动控制满足工业自动化
工业运动控制的测量技术怎么选?
分享适用于工业运动控制的测量技术分析介绍
工业运动控制的测量技术怎么选?这些问题你要弄明白

正运动技术自主自研Windows运动控制实时软核MotionRT7入选“十大工业技术创新奖”





 工商网监
工商网监
评论