 精密旋变数字转换器可测量角位置和速度
精密旋变数字转换器可测量角位置和速度
作者:Jakub Szymczak、Shane O‘Meara、Johnny Gealon 和 Christopher Nelson De La Rama
旋转变压器是测量精确角位置的机电传感器,作为可变耦合变压器运行,初级绕组和两个次级绕组之间的磁耦合量根据旋转元件(转子)的位置而变化,旋转元件通常安装在电机轴上。旋转变压器用于工业电机控制、伺服、机器人、混合动力和全电动汽车中的动力总成单元,以及许多其他需要精确轴旋转的应用,可以长时间承受恶劣条件,使其成为恶劣环境中军事系统的完美选择。
标准旋转变压器在转子上有一个初级绕组,在定子上有两个次级绕组。另一方面,可变磁阻旋转变压器的转子上没有绕组。它们的初级和次级绕组都在定子上,但转子的显著性(裸露的极点)将次级绕组的正弦变化与角位置耦合。图1显示了经典和可变磁阻旋变器。
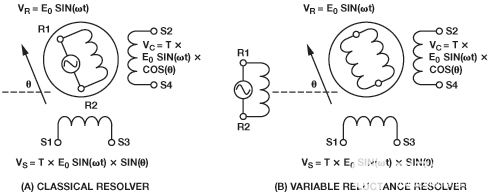
图1.经典旋转变压器与可变磁阻旋转变压器。
当初级绕组R1 – R2被正弦信号激励时,如公式1所示,次级绕组中会感应出一个信号。次级绕组的耦合量是转子相对于定子位置的函数,衰减因子称为旋转变压器变换比。由于次级绕组的机械位移为90°,因此两个输出正弦信号相对于彼此相移90°。旋变器输入和输出电压之间的关系如公式2和公式3所示。等式2为正弦信号;等式3是余弦信号。
 |
(1) |
 |
(2) |
 |
(3) |
其中:θ为轴角,ω为激励信号频率,E0是激励信号幅值,T是旋变变换比。
两个输出信号由轴角的正弦和余弦调制。激励信号以及正弦和余弦输出信号的图形表示如图2所示。正弦信号的最大幅度为 90° 和 270°,余弦信号的最大幅度为 0° 和 180°。
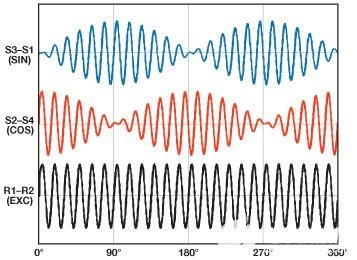
图2.旋转变压器电信号表示。
旋转变压器传感器具有一组独特的参数,应在设计阶段考虑这些参数。表1总结了最关键的电气参数和相应的典型规格。
表 1.旋转变压器关键参数
|
电气参数 |
典型范围 |
单位 |
描述 |
|
输入电压 |
3–7 |
V rms |
推荐应用于旋变器初级绕组R1 – R2的激励信号幅度 |
|
输入频率 |
50–20,000 |
赫兹 |
推荐应用于旋变器初级绕组R1 – R2的激励信号频率 |
|
转换率 |
0.2–1.0 |
V/V |
初级绕组和次级绕组信号幅度之比 |
|
输入阻抗 |
100–500 |
Ω |
旋转变压器的输入阻抗 |
|
相移 |
±25 |
度 |
施加在初级绕组上的激励信号 (R1 – R2) 和次级绕组上的正弦/余弦信号 (S3 – S1、S2 – S4) 之间的相移 |
|
极对 |
1–3 |
每次机械旋转的电旋转次数 |
旋变数字转换器
初级绕组由正弦波参考信号激励,两个差分输出信号正弦和余弦在次级绕组上电磁感应。旋转变压器数字转换器(RDC)在旋转变压器和系统微处理器之间接口,使用这些正弦和余弦信号来解码电机轴的角位置和转速。
大多数 RDC 使用 II 型跟踪环路来执行位置和速度计算。II型环路使用二阶滤波器来确保稳态或恒速输入信号的稳态误差为零。RDC同时对两个输入信号进行采样,以向跟踪环路提供数字化数据。使用此类环路的RDC的最新示例是ADI公司的10位至16位跟踪转换器AD2S1210,其片内可编程正弦振荡器为初级绕组提供激励信号。
如表1所示,典型旋变器需要低阻抗3 V rms至7 V rms信号来驱动初级绕组。RDC 采用 5V 电源供电,通常在激励输出端提供 7.2V p-p 差分信号。该信号没有足够的幅度和驱动能力来满足旋变器的输入规格。此外,旋变器将信号衰减高达5×,因此旋变器输出幅度不符合RDC的输入幅度要求,如表2所示。
这个问题的解决方案是使用差分放大器将正弦信号提升到初级。该放大器必须能够驱动低至100 Ω的负载。一种常见的做法是用大信号驱动初级,以获得良好的信噪比。然后,输出正弦和余弦信号可以使用电阻分压器衰减。
在许多工业和汽车应用中,RDC用于嘈杂的环境,这会将高频噪声引入正弦和余弦线。为了解决这个问题,在尽可能靠近RDC的地方插入一个简单的差分低通滤波器。图3显示了一个典型的旋变数字转换器接口,包括放大器和滤波器。
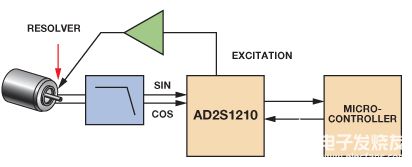
图3.典型旋转变压器系统框图。
操作理论
图 4 显示了 RDC 中的操作块。转换器通过产生输出角度φ来连续跟踪轴角θ,该输出角度反馈并与输入角度进行比较。当转换器跟踪位置时,两个角度之间的误差最小。
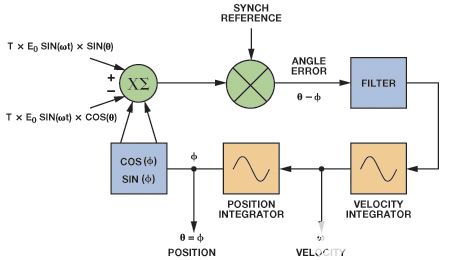
图4.AD2S1210工作原理框图
要测量误差,请将正弦和余弦输入分别乘以 cos(φ) 和 sin(φ):
 |
(4) |
 |
(5) |
接下来,取两者之间的区别:
 |
(6) |
然后,使用内部生成的合成参考解调信号:
 |
(7) |
使用三角恒等式,E0(sin θ cos φ – cos θ sin φ) = E0sin(θ – φ),大约等于E0 ( θ – φ) 表示角度误差 (θ – φ) 的小值。 E0 (θ – φ)是转子的角度误差与转换器的数字角度输出之间的差值。II型跟踪环路使误差信号为零。完成此操作后,φ等于旋转变压器角度 θ。
关键 RDC 参数
在选择合适的器件之前,工程师必须考虑用于表征旋变数字转换器的许多参数。表2显示了AD2S1210的关键RDC参数和规格,它设定了同类最佳转换器的界限。
表 2.AD2S1210
的关键RDC参数和值
|
电气参数 |
典型范围 |
单位 |
描述 |
|
输入电压 |
2.3–4.0 |
V p-p |
正弦和余弦输入的差分信号范围 |
|
锁相范围 |
±44 |
度 |
RDC产生的激励信号与正弦和余弦输入之间的相移 |
|
角度精度 |
±2.5 |
弧分 |
RDC 的角度精度 |
|
分辨率 |
10, 12, 14, 16 |
位 |
RDC 分辨率 |
|
速度精度 |
2 |
低音水平 |
RDC 提供的速度精度 |
|
跟踪率 |
3125, 1250, 625, 156 |
RPS |
特定分辨率的跟踪功能 |
|
建立时间 |
2.2, 6, 14.7, 66 |
女士 |
转换器在特定分辨率下对 179° 阶跃变化的响应时间 |
错误源
完整系统的精度取决于RDC的精度,以及旋变器、系统架构、布线、激励缓冲器和正弦/余弦输入电路的误差。系统误差的最常见来源是幅度失配、信号相移、偏移和加速度。
幅度失配是正弦和余弦信号处于峰值幅度时峰峰值幅度的差异,余弦为0°和180°,正弦为90°和270°。失配可能由旋变器绕组的变化或旋变器与RDC的正弦和余弦输入之间的增益引起。等式 3 可以改写为
 |
(8) |
其中δ是余弦信号相对于正弦信号的幅度失配百分比。静态位置误差ε(以弧度表示)定义为
 |
(9) |
公式9显示,幅度失配误差以两倍的旋转速率振荡,在45°的奇整数倍处最大为δ/2,在0°、90°、180°和270°时没有误差。对于12位RDC,0.3%幅度失配将导致大约1 LSB的误差。
RDC接受来自旋变器的差分正弦和余弦信号。旋变器从载波中移除任何直流分量,因此 V裁判必须增加/2直流偏置,以确保旋变器输出信号在RDC的正确工作范围内。SIN和SINLO输入或COS和COSLO输入之间的直流偏置中的任何失调都会引入额外的系统误差。
共模偏移引入的误差在正弦和余弦信号载波相互反相的象限中更严重。这发生在 90° 和 180° 以及 270° 和 360° 之间的位置,如图 5 所示。端子之间的共模电压使差分信号偏移两倍于共模电压。RDC是比率式的,因此感知到输入信号幅度的变化会导致位置误差。
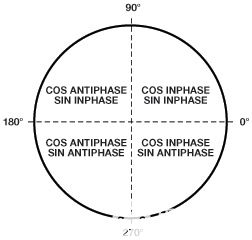
图5.旋转变压器象限。
图6显示,即使正弦和余弦的差分峰峰值幅度相等,输入信号的感知幅度也不同。最坏情况的误差将发生在135°和315°。在135°时,理想系统中的A = B,但在存在偏移的情况下A≠B,因此会发生感知的幅度不匹配。
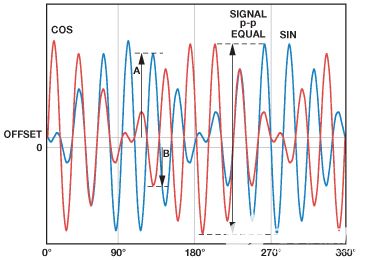
图6.直流偏置偏移。
另一个误差来源是差分相移,即旋变器的正弦和余弦信号之间的相移。由于耦合,所有旋变器上都会存在一些差分相移。小旋变器残余电压或正交电压表示小差分相移。如果正弦和余弦信号线的电缆长度不相等或驱动不同的负载,则可以引入额外的相移。
余弦信号相对于正弦信号的差分相位为
 |
(10) |
其中α差分相移。
求解α引入的误差会产生误差项,ε
 |
(11) |
其中α和ε以弧度表示。
大多数旋变器还会在激励参考信号与正弦和余弦信号之间引入相移,从而导致额外的误差,ε
 |
(12) |
其中β是正弦/余弦信号和激励参考信号之间的相移。
通过选择残余电压较小的旋变器,确保以相同的方式处理正弦和余弦信号,并消除参考相移,可以将该误差降至最低。
在静态工作条件下,激励基准和信号线之间的相移不会影响转换器的精度,但高速旋转变压器由于转子阻抗和目标信号的电抗分量而产生速度电压。速度电压仅在速度下发生,而不是在静态角度下发生,与目标信号正交。它们的最大振幅为

| (13) |
在实际旋转变压器中,转子绕组包括电抗和电阻分量。阻性元件在参考激励中产生非零相移,当转子处于高速和静态时,会出现这种相移。与速度电压一起,激励的非零相移产生跟踪误差,该误差近似为
 |
(14) |
为了补偿旋变器基准激励与正弦/余弦信号之间的相位误差,AD2S1210使用内部滤波的正弦和余弦信号与参考频率载波同相合成内部参考信号。通过确定正弦或余弦的过零(以较大者为准,以提高相位精度)并评估旋变器基准激励的相位来生成,它将参考输入和正弦/余弦输入之间的相移降低到10°以下,并在±44°的相移下工作。合成参考模块的框图如图7所示。
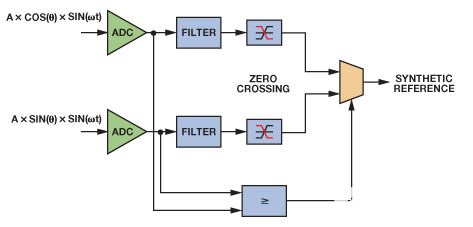
图7.综合参考。
与I型跟踪环路相比,II型跟踪环路的优势在于恒定速度时不会发生位置误差。然而,即使在完全平衡的系统中,加速度也会产生误差项。加速度引起的误差量由控制环路响应决定。图8显示了AD2S1210的环路响应。
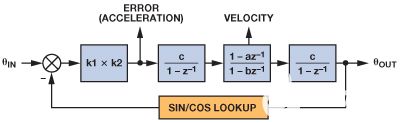
图8.AD2S1210环路响应
环路加速度常数,K一个是
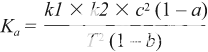
| (15) |
其中,环路系数根据分辨率、输入信号幅度和采样周期而变化。AD2S1210在每个CLK期间采样两次在时期。
表 3.RDC 系统响应参数
|
参数 |
描述 |
10 位分辨率 |
12 位分辨率 |
14 位分辨率 |
16 位分辨率 |
| K1 |
模数转换器增益 |
输入电压/参考电压 = (3.15/2)/2.47 (标称) |
|||
| K2 |
误差增益 |
12π × 106 |
36π × 106 |
164π × 106 | 132π × 106 |
| 一个 |
补偿器 零点系数 |
8187/8192 |
4095/4096 |
8191/8192 | 32,767/32,768 |
| b |
补偿器 极系数 |
509/512 |
4085/4096 |
16,359/16,384 | 32,757/32,768 |
| c |
积分器增益 |
1/220 |
1/222 |
1/224 |
1/226 |
| T |
采样周期 |
1/(CLK在-2k |
|||
加速度引起的跟踪误差可以计算为

| (16) |
图9显示了不同分辨率设置下由于角度误差与加速度的关系。
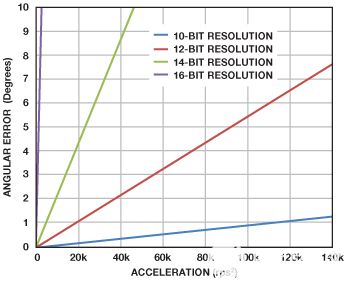
图9.角度误差与加速度。
输入滤波器
为获得最佳系统精度,可将旋变器输出直接连接到AD2S1210正弦、余弦、正弦和COSLO引脚,以减少失配或相移。然而,这并不总是可行的。可能需要衰减旋变器的正弦和余弦信号以匹配RDC的输入规格,由于噪声环境,可能需要一些信号滤波,并且旋转变压器连接器可能需要ESD或短路保护。
图10显示了旋变器和AD2S1210之间的典型接口电路。串联电阻器和二极管提供足够的保护,以减少外部事件(如ESD或电源或接地短路)的能量。这些电阻和电容实现一个低通滤波器,可降低因驱动电机而耦合到旋变器输入端的高频噪声。可能还需要衰减旋变器的正弦和余弦输入信号,以符合RDC的输入电压规格。这可以通过增加电阻R来实现一个.AD2S1210具有将正弦、正弦、余弦和共弦偏置至V的内部电路裁判/2.这种弱偏置很容易被过度驱动。实现此目的的一种简单方法是包含 47kΩ 电阻 RB,这会将信号偏置至 2.5 V。
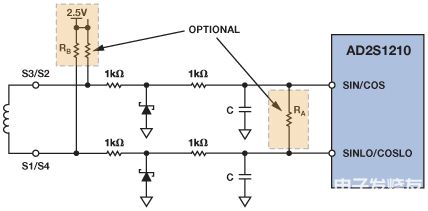
图 10.接口电路。
激励缓冲器
通常需要缓冲器来驱动旋变器的低阻抗输入。该激励缓冲器可以通过多种方式实现,此处显示了其中两种方式。第一个电路通常用于汽车和工业设计,而第二个电路通过用高输出电流放大器代替标准推挽式架构来简化设计。
图11所示的大电流驱动器对基准振荡器输出进行放大和电平转换。该驱动器采用双通道、低噪声、精密运算放大器AD8662和一个分立式发射极跟随器输出级。重复缓冲电路提供全差分信号以驱动旋变器的初级绕组。
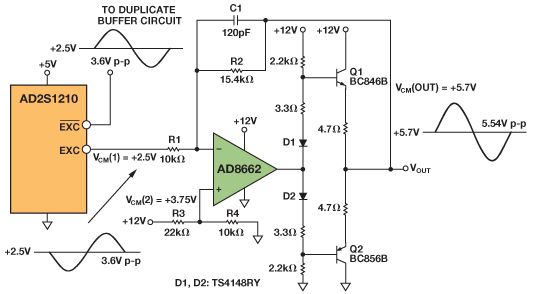
图 11.高电流基准电压缓冲器采用带推挽输出的运算放大器AD8662。
这种高电流缓冲器提供针对标准旋变器优化的驱动能力、增益范围和带宽,并且可以进行调整以满足应用和传感器的特定要求,但复杂的设计在元件数量、PCB尺寸、成本和工程时间方面存在许多缺点,需要将其更改为特定应用的需求。
该设计可以通过用放大器代替AD8662来优化,该放大器可提供直接驱动旋变器所需的高输出电流,从而简化设计并消除推挽级的需要。
图12所示的大电流驱动器使用具有轨到轨输出的大电流双通道运算放大器AD8397对基准振荡器输出进行放大和电平转换,从而优化与旋变器的接口。AD8397具有低失真、高输出电流和宽动态范围特性,非常适合与旋变器配合使用。该器件具有 310mA 电流能力,适用于 32 Ω负载,无需使用传统的推挽级即可向旋变器提供所需的功率,从而简化驱动器电路并降低功耗。重复电路提供全差分信号以驱动初级绕组。AD8397采用8引脚SOIC封装,额定温度范围为–40°C至+85°C扩展工业温度范围。
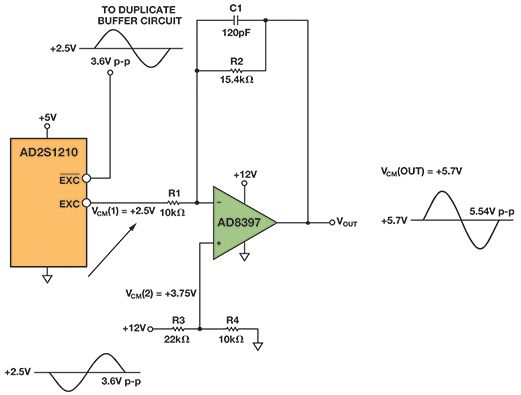
图 12.基于运算放大器AD8397的大电流基准电压缓冲器
可以改变无源元件值以改变输出幅度和共模电压,输出幅度由放大器增益R2/R1设置,共模电压由R3和R4设置。
电容C1和电阻R2构成一个低通滤波器,以最大限度地降低EXC和EXC输出端的噪声。应选择电容器以最小化载波的相移。激励输出与正弦和余弦输入之间的总相移不应超过RDC的锁相范围。电容器是可选的,因为经典旋转变压器可以很好地滤除高频成分。
图13显示了基准电压缓冲器AD8397与传统推挽电路的比较。FFT分析仪测量AD2S1210激励信号的基波和谐波功率。
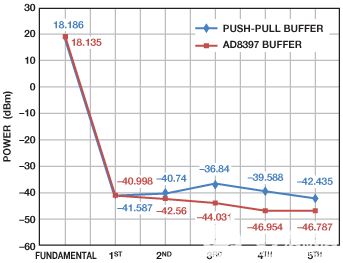
图 13.AD8397缓冲器与AD8662推挽式缓冲器
两种配置之间每个基波的功率差异很小,但AD8397缓冲器降低了谐波。虽然AD8397电路的失真略低,但两个缓冲器都能提供足够的性能。与传统电路相比,取消推挽级简化了设计,占用的空间更小,功耗更低。
结论
当与旋变数字转换器AD2S1210结合使用时,旋变器可以创建一个高精度、可靠的控制系统,用于电机控制应用中的位置和速度测量。为了实现最佳整体性能,需要基于AD8662或AD8397的缓冲电路来放大激励信号,并提供旋变器所需的驱动强度。为了完善系统,基本输入电路可以根据需要提供信号调理。与所有混合信号机电一体化信号链一样,必须注意设计一个考虑所有误差源的精确系统。AD2S1210具有可变分辨率、基准电压源生成和片内诊断功能,为旋变器应用提供了理想的RDC解决方案。它有工业级和汽车级可供选择。
审核编辑:郭婷
-
电动汽车
+关注
关注
156文章
12242浏览量
233064 -
变压器
+关注
关注
160文章
7589浏览量
136946 -
转换器
+关注
关注
27文章
8778浏览量
148716
发布评论请先 登录
相关推荐
RDC旋变数字转换器电机应用
精密旋变数字转换器测量角位置和速度
高性能旋变数字转换器AD2S1210的特点及应用分析

CN0317 用于10位至16位旋变数字转换器的集成高电流驱动器

CN0276 高性能、10位至16位旋变数字转换器





 工商网监
工商网监
评论