 如何调整PID控制器?
如何调整PID控制器?
前言:
如何调整 PID 控制器?让我们讨论一下 PID 参数是什么以及如何使用它们。在我们之前的文章中,什么是 PID 调整参数?,我们提供了几个受控过程的简单示例,并开始解释 PID 控制器的特定术语。
如前所述,您可以启用每个参数,即比例、积分和微分项。
现在让我们讨论一下这些参数是什么以及如何使用它们。
一、PID控制器
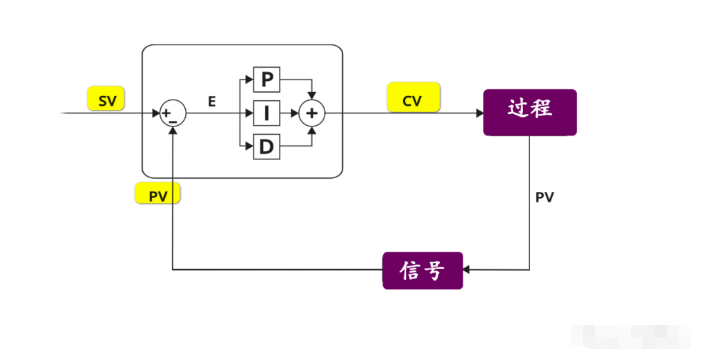
用最简单的术语来说,控制器计算 P、I 和 D 动作,并将每个参数乘以误差或 E,它等于直接作用中的 SP-PV,如前所述。然后,将所有参数计算加起来以产生控制变量。
不幸的是,没有关于参数术语的行业标准。以下是今天发现的一些用途:
1、PID 整定 比例项
比例项,通常称为P常数,可以称为比例增益或只是增益,它不是一个单位,而是一个比率。此参数也可称为比例带,以百分比为单位进行测量。
该参数可以称为K P、Gain 或其他。这是决定系统响应速度的参数。所指的名称因制造商而异。
– 对于使用术语增益的控制器,将此调谐参数调高可能会导致更敏感、更不稳定的环路。
– 相反,在带有比例带单元的控制器上,降低此调整参数会以相同的方式影响回路。
请记住这一点,了解您拥有的控制器类型对于确保正确调整参数至关重要。

2、PID 整定积分项
积分项或 常称为重置的I常数 也可以用不同的方式表示,例如:
– 每秒重复,
– 每次重复的秒数,
– 每分钟重复一次,
– 每次重复分钟。
无论测量类型如何,积分都是信号报告的所有值的总和,从您开始计数到完成计数或绘制曲线下的面积捕获。该参数可以称为K i、T i或其他。此参数确定消除稳态误差的速度。

由于测量的不同,这个参数可能没有那么直观。
简而言之,每次重复测量的分钟值越小将产生更大的积分作用,而每分钟重复测量的较大值将产生更大的积分作用。

3、PID 整定微分项
导数或D常数单位通常为秒或分钟。
导数常数的目的是预测变化。导数作用作用于过程变量中测量的变化率。
这个参数的值基本上意味着你想预测未来多远的变化率。此参数有助于在您的循环中创建更快的响应以及更好的执行循环。
然而,由于微分项测量过程变量的变化率,过程变量必须是一个非常干净的信号,意味着信号中没有噪声。因此,在控制中不经常使用派生术语。

4、PID算法和参数
最常用的控制器是 PI。大多数流程都可以很好地使用这种类型的控制。P 和 PID 控制器偶尔使用,而 PD 控制器很少使用。
PID 控制器是非常复杂的设备,可能有许多可调参数。过程和算法类型也可能有所不同。PID控制器研究的其他参数是
– 系列算法,
– 理想算法,
– 并行算法,
– 过滤,
– 扫描时间,
– 抗饱和,
– 自我调节与集成过程,
– 反向作用,
- 死的时间,
– 滞后,
– E 导数或 PV 导数,
仅举几例

5、PID整定方法
由于调整最基本的 PID 回路存在固有的困难,因此这些比本基础教程更高级的参数最好留给以后的课程或自我探索。
调整 PID 回路是一门科学,但最广泛使用的调整方法是试错法。
还有其他方法需要一个多步骤的过程来确定您的数字应该在哪里。
调整的目标是确保在发生干扰后围绕设定点的最小过程振荡。
调整控制器的第一步是确定您可以进行多少调整而不会对过程产生严重影响。
跟厂里的人商量一下,如果调整PID控制器的参数不会有不良反应,就可以开始调整了。如果影响是有害的,您必须采取更加谨慎的方法。
显然,根据这是新安装还是现有工厂,您的方法会有所不同。在现有安装中,您只是希望调整值并创建更稳定的过程。

二:如何调整 PI 控制器
1、如果 PV 变化很快,如何调整 PI 控制器
因为 PI 控制器使用最广泛,所以我们只会调整这些参数。正如我们已经讨论了 PID 项中测量的差异,在本教程中,我们将标准化增益和每分钟重复次数。
直接进入,如果您的过程变量随着控制变量的变化而快速变化,您将以低增益开始,可能低至 0.1,同时在每分钟 1 到 10 次重复之间调整您的重置。

2、如果 PV 变化缓慢,如何调整 PI 控制器
相反,如果过程变量变化缓慢,则从较高的增益和较低的重置开始,分别介于 2 和 8 之间以及 0.05 和 0.5 之间。
一次只调整一个参数并观察结果。继续,直到您获得稳定的过程。

一种更谨慎的方法是从低增益开始,禁用积分和微分。
观察过程并开始通过将值加倍来逐步调整增益。当过程开始振荡时,将增益值调低 50%。
使用一个小的积分值并观察过程。将值逐渐加倍,直到发生振荡,然后将积分减少 50%。
此时,您应该在附近的某个地方,可以开始微调过程。

结论:
正如您现在可能已经猜到的那样,关于这个主题还有很多东西要学习。但总而言之,您可能可以在大多数流程中使用PI控制器。确保您知道所选控制器的测量类型,并逐步调整 P 和 I 参数,直到实现良好的稳定过程。
如果您对 PID 调整或一般 PID 有任何疑问,请在微信公众号中或者加微信留言,下面。我们会阅读每条留言之后并尽量在 24 小时内回复!如果您的问题具有代表性,我们将单独写一篇文章详细说明。
有朋友、客户或同事可以使用这些信息吗?您可以分享这篇文章给他们。
扩展阅读:
[用 SCL 编写你的第一个 TIA 代码]
-
控制器
+关注
关注
112文章
16408浏览量
178679 -
PID
+关注
关注
35文章
1473浏览量
85632 -
SP
+关注
关注
0文章
32浏览量
22966
发布评论请先 登录
相关推荐
一种简单的PID控制器调整方法
调整系统控制量的模糊PID 控制器的计算机设计与仿真
基于神经网络PID控制的交流伺服系统
基于模糊PID的全方位移动机器人运动控制
基于免疫遗传算法优化的自调整PID控制器研究
基于粒子群优化的模糊PID控制器研究





 工商网监
工商网监
评论