 如何使用ST MotorControl Workbench来启动发动机
如何使用ST MotorControl Workbench来启动发动机
2.1安装MotorControl Workbench↑
对于 MotorControl Workbench 的安装,请按照教程上一部分中提到的步骤进行操作。
2.2启动第一个应用↑
由于使用的包是P-Nucleo-IHM03,因此必须选择使用的适当板。
这样做的第一步是单击“新建项目”并选择NUCLEO-G431RB作为控制板,选择X-NUCLEO-IHM16M1作为电源板,然后单击“确定”,如下图所示:
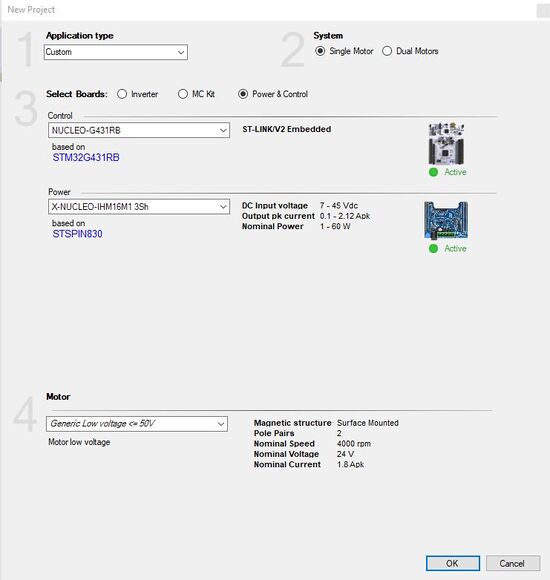

值得一提的是,在本教程中,使用了包 P-Nucleo-IHM03。请确保从您使用的套件中选择合适的板。
选择完包装板后,会出现另一个窗口,允许用户检查详细信息并设置不同特性的值。
信息
建议检查一些不同的值,并尝试使用电源控制和控制板的用户手册来理解它们。
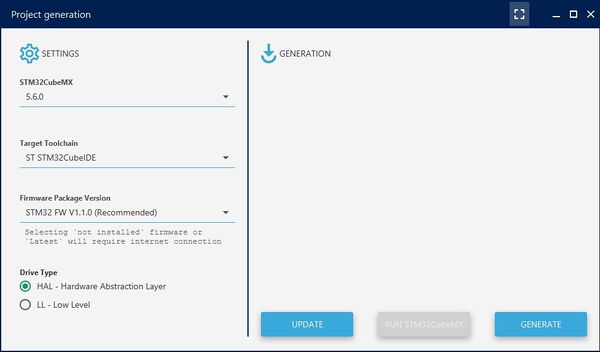
稍后,只需单击下图中显示的生成文件按钮,并将项目保存在适当的目录中。 然后会出现一个允许选择要使用的 IDE 和驱动器类型的窗口。只需点击Generate,软件完成生成 .ioc 文件后,不要更改任何参数,只需点击Run STM32CubeMX。 .ioc 文件现在已打开,下一步是简单地在 STM32CubeIDE 中生成代码,不要忘记更新项目管理器部分中的项目信息。

信息
CORDIC 是一种硬件加速器,旨在加速某些数学函数的计算,特别是
与软件实现相比,三角函数和双曲线函数。
代码生成后,唯一要做的就是连接电池组和调试程序。
该程序已安装在命令板上,一旦单击用户按钮,引擎就会正确旋转。
2.3启动电机并延时旋转发动机↑
在这部分中,目标工作是启动电机并以用户设定的延迟使其停止。
在代码生成之前,第一步与前一部分相同。
然后,将以下代码添加到主文件的 while 循环中:
while ( 1 ) { MC_StartMotor1 (); HAL_Delay ( 2000 ); MC_StopMotor1 (); }
3控制电机的方向
在这一部分中,电机控制是基于方向控制的。
它分为两部分,第一部分是 MotorControl Workbench 的管理,第二部分涉及编程部分。
3.1更改 MotorControl Workbench 参数↑
启动 MotorControl Workbench 后,选择合适的板并打包。稍后生成前面部分中介绍的项目。
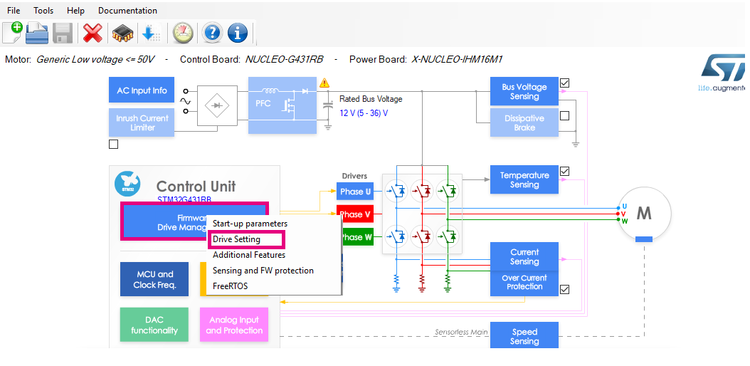
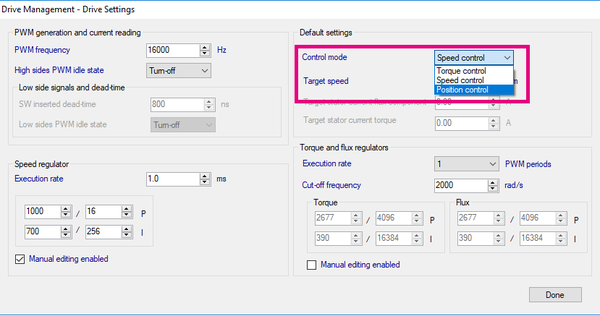
生成项目文件后,单击Firmware Drive Management,然后选择Drive Setting。 出现一个弹出窗口,要控制电机的方向,请从默认设置部分选择控制模式的位置控制。然后,生成代码,如启动第一个应用程序部分所示。
3.2管理编程代码部分↑
现在,要管理电机的方向,请在声明部分 添加以下代码:
整数 x = 0 ;
稍后在While循环 中添加以下代码:
while ( 1 ) { MC_StartMotor1 (); x = x + 0.175 ; MC_ProgramPositionCommandMotor1 ( x , 0 ); }
x是我们想要引导电机的角度,此处设置为 0 的第二个变量表示设置为到达所需位置的时间。
在此示例中,我们希望电机在循环的每个循环中将角度 x 增加 0.175 以保持移动。
添加完代码后,构建并调试生成的程序,可以看到电机正在改变方向。
现在你可以:
使用 MotorControl Workbench 启动您的第一个应用程序
生成电机控制代码
旋转引擎
指定开始和停止之间所需的延迟
改变方向
-
发动机
+关注
关注
33文章
2484浏览量
69445 -
ST
+关注
关注
32文章
1134浏览量
129017
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论