 ADXL202双轴加速度计在与车速表无关的汽车导航系统中的有用作用
ADXL202双轴加速度计在与车速表无关的汽车导航系统中的有用作用
作者:Peter Shih 和 Harvey Weinberg
在过去十年中,使用全球定位系统(GPS)的车辆导航越来越受到人们的兴趣。GPS导航经常安装在当今的高端豪华车和许多商用车中。由于它们依赖于来自卫星的高频无线电信号,因此配备 GPS 导航系统的车辆可能会在短时间内丢失 GPS 信号。通过适当的算法,GPS可以与其他航向绘图技术集成,为用户提供持续准确的导航信息。
航位(演绎)推算是车辆导航中广泛使用的一种方法。它利用三个不同的输入来预测位置:一组起始坐标、行进方向和行进速度。由于其相对定位方案,其精度受到限制;绝对位置误差与行进距离成正比。非 GPS 车辆导航的其他方法包括地图匹配、惯性导航和 Delta A 测量。地图匹配基于以下原则:如果您在道路附近或与之平行行驶,则很有可能您确实在该道路上(在人口稠密的地区可能无法正常工作)。惯性导航依靠加速度计来推导出速度作为加速度的积分。在Delta A测量中,随后从接收器恢复的GPS信号与来自非GPS系统的输入相关联。这种方法可以校正加速度计的不准确性,例如噪声和温度/时间上的零g偏移。这些技术中的一种以上可以与GPS结合使用,以更准确地显示位置。
虽然使用汽车安装的速度表会有所帮助,但会出现某些困难。通常,车速表信息不可用,因为它没有总线传输到发动机/ABS/稳定性控制计算机之外的系统。由于在许多情况下它被认为是“安全关键”的,因此速度表输出不会连接到任何可能使总线瘫痪的东西。此外,GPS系统通常由第三方构建,他们可能希望构建具有广泛潜在市场的通用产品。正是在此类应用中,ADXL202双轴加速度计可用于为导航系统开发精确的速度估计。数字罗盘或陀螺仪与加速度计结合使用,以确定大致的行进方向。然后,导航系统(结合上述其他方法)转换信息,以确定相对于信号丢失点的位置。
这里描述的确定速度的方法使用加速度计来感知前轮和后轮遇到道路颠簸(直行时)的时间间隔。无论是在当地道路还是高速公路上行驶,道路上总会有瑕疵。这些缺陷转化为颠簸和颠簸,立即被汽车的车轮感知,最终被乘客感知。为了通过感应这些颠簸来跟踪速度,加速度计用于识别它们的幅度和时间。因此,对于具有给定轴距 (W) 的汽车,间隔 (T1) 对于两个车轴遇到颠簸,可以使用以下等式计算汽车行驶的速度:(见图 1。
速度 [英里/小时] = (W [英尺]/T1 [秒]) * (3600 秒/小时)/(5280 英尺/英里)。
速度 [公里/小时] = (W [米]/T1 [秒]) * (3600 秒/小时)/(1000 米/公里)。
示例数据日志
Mxx= 凸起幅度(占空比 %)
txx= 颠簸的瞬时时间(秒)
Tx= 两个相关凸起之间的持续时间(秒)
S0= 前一个有效速度 (mph)
S1= 当前计算速度(英里/小时)
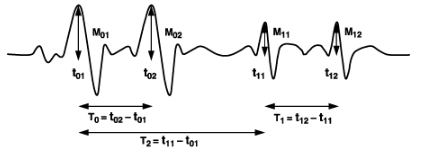
图1.速度测量的事件计时。
在记录当地道路上典型行驶期间的数据以开发实验信息时,加速度计不容易区分汽车悬架系统中的反弹和振动以及由道路不规则引起的尖峰对。因此,需要一个过滤系统来隔离凸起。ADXL202EB-232评估板内置软件,可通过低通滤波对数据进行平滑处理。这提供了识别道路颠簸并在计算中使用它们的更好机会。这个问题解决了,就出现了一个相关性问题——例如,如果有两个相似的颠簸相距不到一辆车的长度,那么很难理解汽车在短时间内经历的四个总颠簸。因此,有必要提出一种算法来将数据点干净地转换为有效的速度表读数。
如果加速度计放置在车轴之间的中间位置,X轴平行于地球表面并直接瞄准地球表面,Y轴垂直于地球表面,则前轮和后轮产生的颠簸脉冲的大小大致相等(在一定程度上取决于车辆的悬架系统)。为了识别颠簸对,有必要进行幅度比较以匹配源自前后轴的颠簸。同时,必须将当前表格速度与最后有效速度进行比较,以确定当前计算的速度是否可行。例如,如果车辆在大约一秒钟前以 25 英里/小时的速度行驶,那么当前速度极不可能达到 45 英里/小时或更高。因此,通过使用时序和速度比较,任何没有意义的输出都将被合理化或忽略。
数据分析。ADXL202的数字输出经过占空比调制;导通时间与加速度成正比。50% 占空比(方波输出)表示标称加速度为 0g;比例因子为每 g 加速度占空比变化±12.5%。这些标称值受器件初始容差的影响,包括零g失调误差和灵敏度误差。
在这里描述的应用中,50%的占空比输出对应于完全平稳的行驶——加速度计没有检测到颠簸或振动。一般来说,由于其悬架动力学,车辆在较低速度下对颠簸的反应更灵敏。因此,对于较低的速度,需要降低对颠簸大小的敏感性(Mxx),阈值水平可以更高。小于阈值水平的量级将被视为无效数据,而高于阈值(有效量级)的量级将进入下一阶段的过滤。
下一阶段的目的是阻止两个相邻颠簸所暗示的不可行的速度,这两个颠簸比车辆的轴距更近。为了解决这个问题,如果 S1与 S0 相比,(定义如下)超出了 20 mph/s 的一般加速限制,则数据集无效。但是,四个凸块的配置可以通过配对第一个和第三个凸块以及第二个和第四个凸块转换为合法速度(图 2)。
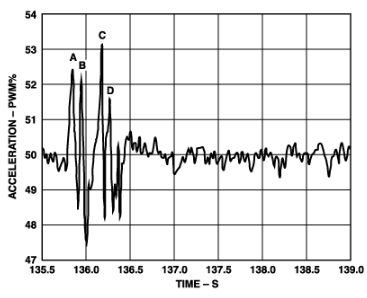
图2.X轴(前后),平行于地球表面
答:M01= 52.41%, t01= 135.862秒
B: M11= 52.15%, t11= 135.938s
C: M02 = 53.08%, t02 = 136.179s
D: M12= 51.66%,t12 = 136.242s
图2显示了ADXL202EB在以20 mph恒定速度行驶的汽车中记录的最新数据。乍一看,似乎A和B是两个相关的凸起,以及C和D。然而,t11– 吨01= 0.076 秒,换算成大约 81 英里/小时的速度。这将与使用Delta A测量方法的最后一个有效速度进行比较,并将否定A和B的相关性。然后 A 和 C 配对:t02– 吨01= 0.317 秒,B 和 D (0.304 秒)也是如此,它们分别转化为大约 19.4 英里/小时和 20.2 英里/小时的速度。根据公式 1 和 9 英尺轴距,Tx对于 20 英里/小时等于 0.307 秒。这里的结果分别显示3.2%和1%的差异。
这个简单的解决方案处理最常见的错误读数来源。但是,当然还有许多其他凸块配置可能会导致速度读数错误。其中许多可以通过越来越聪明的算法和信号调理来解决,但最终,人们必须意识到,这种计算是替代GPS信号暂时丢失的系统的一部分,旨在在短时间内保持合理的精度。
哪个轴?可以考虑使用 X 轴或 Y 轴(或两者)作为加速度数据来测量道路上的颠簸。Y轴(垂直)测量实际大小,由汽车的悬架系统动力学修改(并且经常混淆),而X轴测量汽车经过颠簸时前后加速度分量(加速度计交叉轴)的大小。
第一种方法(图3)测量Y轴加速度(垂直于地球表面)。在没有颠簸的情况下,测量值将为1 g,由地球的静态引力确定。标称 62.5% 输出 (50% + 12.5%/g) 可以偏移为 50%,作为正或负垂直挠曲力的起点。
第二种方法(如图2所示)使用X轴(平行于地球表面)来测量前后加速度。在无颠簸的情况下,测量值将为 0 g。由于汽车的运动受到颠簸的影响,而加速度计会拾取 Y 轴加速度峰值,该峰值被汽车的悬架系统强烈过滤。同时,由于颠簸引起的前后运动(以及加速度计的跨轴灵敏度),X轴还拾取了该加速度峰值中更小但“更干净”的前向分量。在试运行期间,后一种方法(图2)给出了更好的结果。
这种方法有助于过滤掉不需要的噪音。此外,在图 3 中可以看到,在遇到颠簸时,加速度的垂直分量往往显示出相当低的阻尼系数。依靠前后运动可以克服这些复杂性。
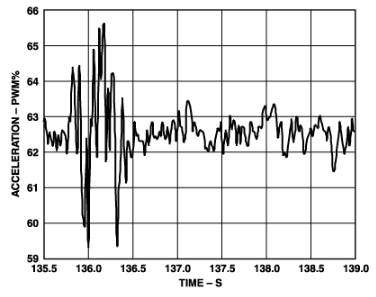
图3.Y(垂直)轴,垂直于地球表面。
本文所述的试验是在个人计算机上使用ADXL202EB-232评估板和Crossbow软件进行的。以下是该过程及其流程图的分步说明(图 4)。
将ADXL202EB-232连接到串行电缆,然后连接到计算机的RS-232端口。
打开Crossbow提供的软件程序X-Analyze。
单击“添加连接”,然后选择“COM1上的ADXL202-EB-232A”。
点击“配置连接”;然后点击“校准”。
要进行校准,请按住 XY 平面垂直于地面的电路板,然后将电路板围绕该平面旋转 360 度。
选择更新速率尽可能快,记录速率为50 Hz;选择过滤速率为 1。
选择日志记录文件夹;这是保存.txt日志文件的位置。
点击“保存并退出”。
将电路板安装/连接到车辆上,Y 轴朝向车辆底部,X 轴正前方。确保电路板安装牢固,以便在颠簸时不会相对于车身移动。
准备好记录数据时单击“记录所有连接”。
记录数据后,相同的按钮用于“停止日志记录”。
打开.txt文件并复制并粘贴到Excel上以创建图表/图形。
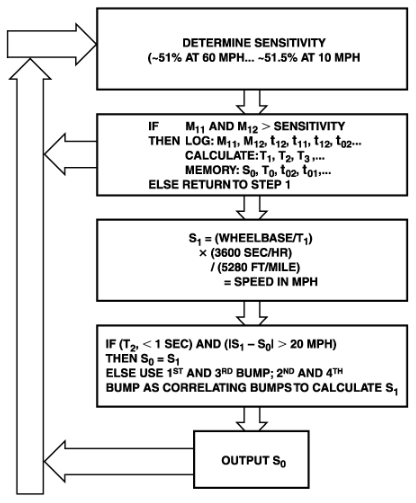
图4.计算流程图。
审核编辑:郭婷
-
加速度计
+关注
关注
6文章
702浏览量
45897
发布评论请先 登录
相关推荐
基于加速度计的无陀螺惯性导航系统的研究
具有数字信号输出的双轴加速度传感器ADXL202
三轴加速度计ADXL330的特点应用分析
ADXL202双轴表面微机械加速度计的结构特点与应用
ADXL202/ADXL210:低成本±2 g/±10 g双轴IMEMS<sup>®</sup>数字输出加速度计过时数据表

ADXL202ADXL210低成本±2 g±10 g双轴IMEMS®加速度计,数字输出过时数据表
双轴、低g、完全集成的加速度计






 工商网监
工商网监
评论