 将制图师3D图形SLAM堆栈用于无人机导航
将制图师3D图形SLAM堆栈用于无人机导航
SLAM实现的任务是根据传感器观察创建一致的世界地图。这项任务需要检测以前访问过的区域,并使用这些信息来细化轨迹(及其尾部,当前的车辆姿态估计)。在SLAM术语中,这些事件称为闭环,是减少随时间累积的漂移量的关键。
制图师是一种最初由谷歌开发的开源 LiDAR 图形 SLAM 堆栈。图形SLAM实现的架构通常被视为由两部分组成:特定于传感器的前端,用于处理传感器数据并构建姿势图,以及与传感器无关的后端,用于执行姿态图优化。制图师包括两个组件:本地轨迹生成器(也称为本地 SLAM)和全局 SLAM。
本地轨迹生成器组件是SLAM前端的一部分。它使用体素占用网格扫描匹配器和地图构建器来构建一组时间紧凑的子地图,其中每个扫描都插入到两个相邻的子地图中。前端的第二部分是全局SLAM组件的约束生成器子系统,它使用基于分支和边界的快速相关扫描匹配器来发现旧子映射和新激光扫描之间的闭环对应关系,反之亦然。
硬件说明
我们的实验设置包括由Kopterworx公司组装的定制四轴飞行器,如图1所示。它具有四个T型电机P60 KV170推进装置和22“折叠螺旋桨。车辆尺寸为1.2 x 1.2 x 0.45m,质量m = 9kg,包括所有电子设备和电池。更大的车辆规模可实现更大的机载电池容量,允许30分钟的自主飞行时间。我们使用Pixhawk 2.1飞行控制器和ProfiCNC / HEX Kore大电流电源板。我们还安装了一台英特尔NUC 迷你电脑机载计算机,通过串行通信与飞行控制器通信。

图1用于我们实验的无人机平台 操作员可以通过WiFi接口访问NUC。安装在车载计算机上的操作系统是带有ROS Melodic中间件的Ubuntu Linux 18.04 LTS。除了飞行控制器外,机载计算机还与飞行器的完整感官设备进行通信,并运行高级计算密集型算法。此外,我们还连接了基于U-blox M8P IC的Velodyne Puck LITE LiDAR、LPMS CU2 外部 IMU 和 HERE+ GPS。这些实验是在Borongaj大学校园的户外进行的。在图2所示的实验中,GPS测量用于对轨迹进行地理配准。
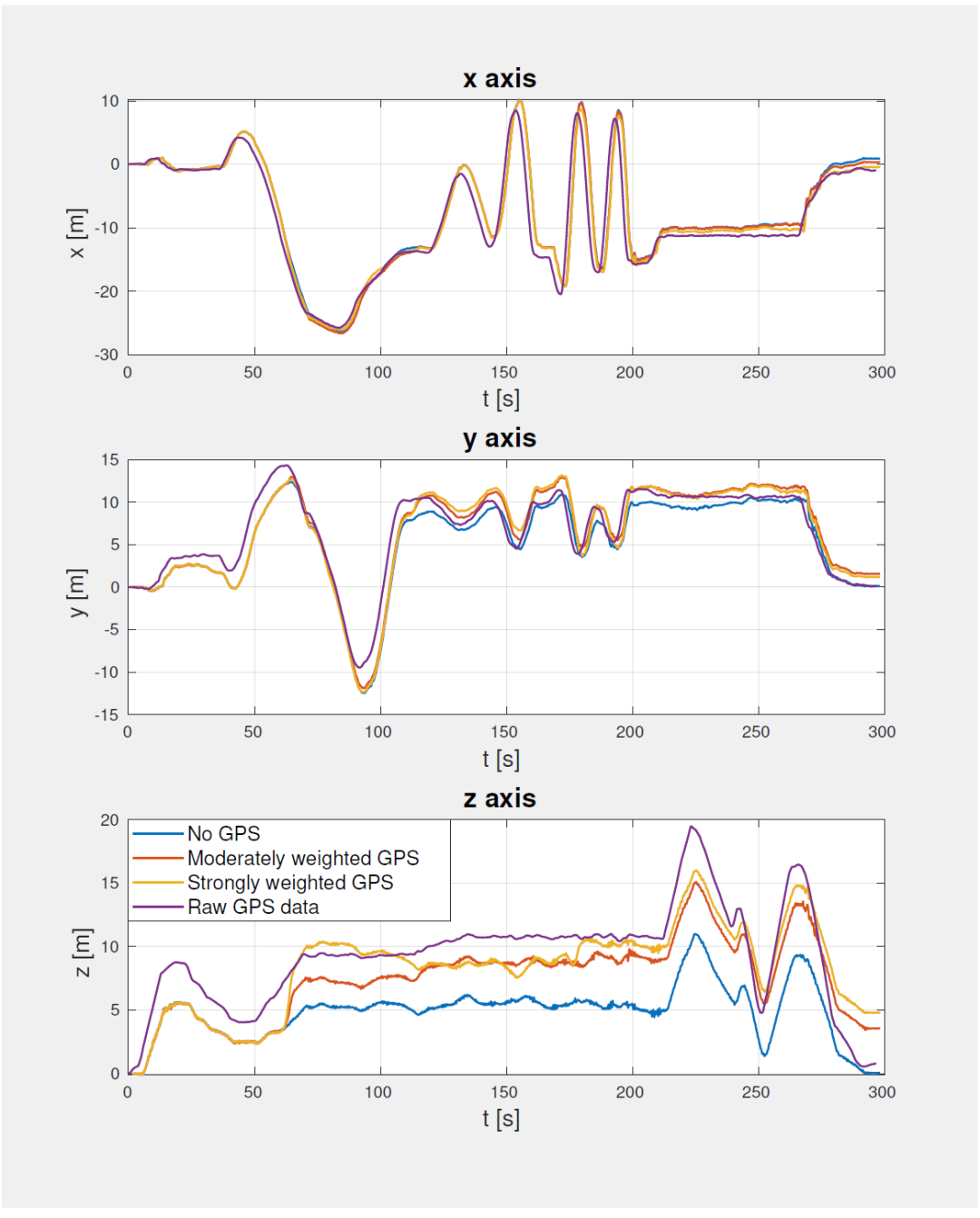
图2制图师针对不同 GPS 设置报告的无人机坐标比较 

安全闭环

 图1中的图表记录在围绕一栋小建筑物的圆形轨迹上。轨迹足够长,全局SLAM可以将一些闭环校正插入到姿势图中,并在优化中使用它们。这些在图1所示的z轴图上清晰可见,因为它们会在姿势估计中引入阶跃干扰。而引入的比例因子消除了这些台阶干扰,并确保了平滑的姿态估计。
图1中的图表记录在围绕一栋小建筑物的圆形轨迹上。轨迹足够长,全局SLAM可以将一些闭环校正插入到姿势图中,并在优化中使用它们。这些在图1所示的z轴图上清晰可见,因为它们会在姿势估计中引入阶跃干扰。而引入的比例因子消除了这些台阶干扰,并确保了平滑的姿态估计。
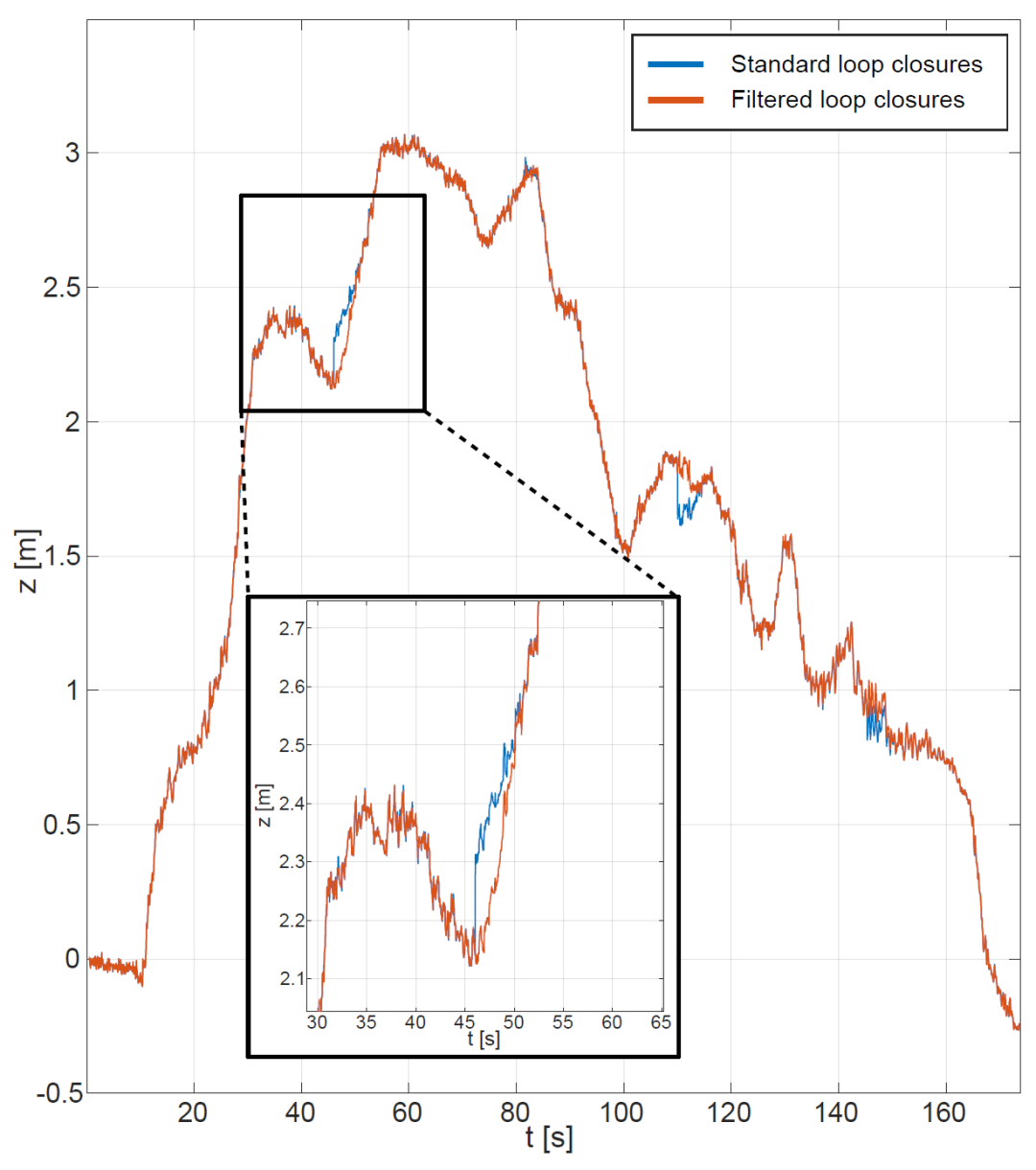
图3在循环闭合的情况下,将过滤后的姿势估计值与原始制图师的姿态估计值进行比较
在空中SLAM中使用全球定位系统
由于大多数无人机默认配备GPS传感器,因此我们尝试利用此传感器对SLAM轨迹进行地理参考。在我们的测试现场,GPS的标准偏差通常大于1.5米,因此事实证明,在轨迹优化中使用具有挑战性。Pixhawk过滤的位置信号具有明显的垂直漂移-起飞和着陆高度测量值之间存在80厘米的差异(实际上应该是相同的)。 我们尝试调整权重,该权重控制GPS测量如何影响姿势估计,以便对轨迹进行地理参考。不幸的是,我们还没有设法完全消除不准确的GPS测量对姿态估计的负面影响,而不会在优化过程中极大地减轻它们的重量,延长获得位置和方向锁定所需的时间。图2显示了制图员在不使用 GPS 测量值和两种不同的 GPS 测量权重的情况下报告的姿态估计值。Pixhawk报告的GPS测量值(因此轨迹仅限于它们)不一致,因为报告的起飞和着陆高度不匹配。该图还显示了在第一个姿势图优化时报告的高度的剧烈变化。 较短的 SLAM 轨迹(例如图2中在没有GPS 测量的情况下处理的轨迹)可以被视为地面实况,尽管没有地理配准,因为不同的 LiDAR 点云要素(如墙壁和屋顶边缘)在地图中保持一致。这种一致性主要是由于发现的闭环约束,轨迹不同部分的激光扫描被正确交叉配准。
导航
提取制图师子地图,将其转换为点云并使用这些点云构建OctoMap,使我们的无人机能够在其环境中规划无碰撞路径。因此,在我们的系统中引入OctoMap使我们不仅可以使用制图师进行姿态反馈,还可以将其用作导航有用的环境信息来源。图4 显示了使用 Cartographer子地图云构建的OctoMap示例,其中还显示了无人机在导航过程中经过的路径。
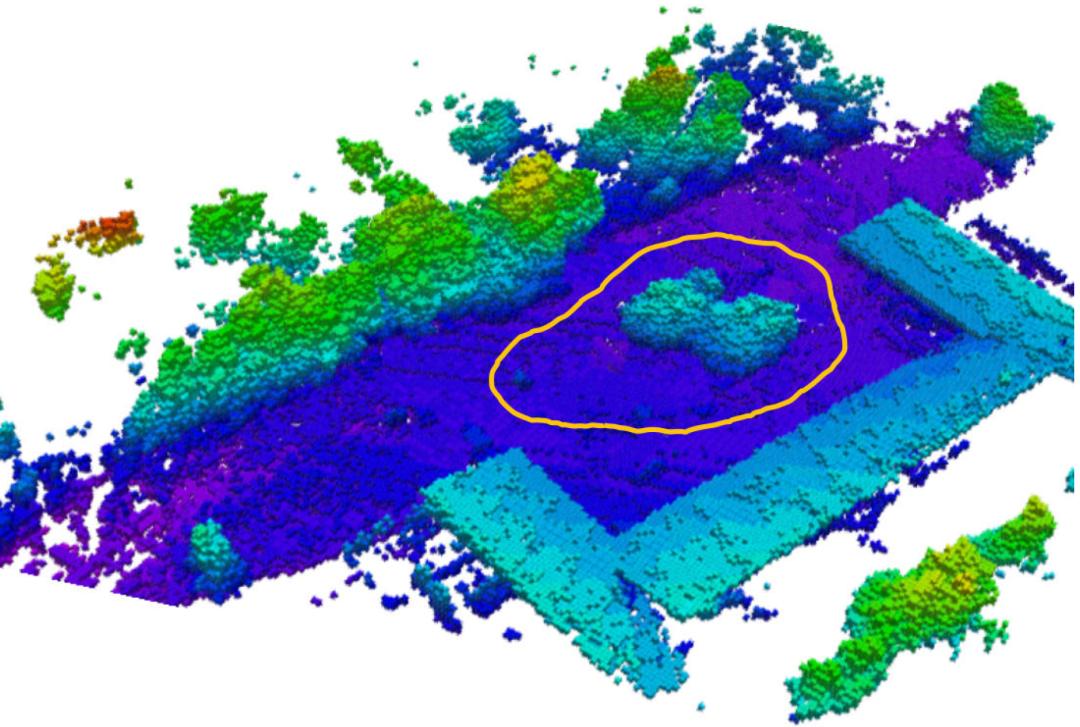
图4导航期间创建的八元图,其中包含无人机经过的路径 环路闭合的过滤和子地图云的提取是对制图器代码库的有益补充。前者使姿态估计更适合于控制系统反馈,因为它消除了在环路闭合事件期间引入的阶跃信号,而后者创造了使用子地图规划无人机执行的无碰撞路径的可能性。目前最好避免在制图师的这种特定配置中使用M8P GPS传感器,因为它对姿势估计质量有不利影响。所描述的GPS对准方法之前已成功测试并用于地面车辆(赫斯基AGV)的控制回路,以及基于制造商Novatel制造的惯性导航系统的专有商业勘测级LiDAR数据采集系统。
审核编辑 :李倩
-
传感器
+关注
关注
2550文章
51008浏览量
752972 -
无人机
+关注
关注
228文章
10417浏览量
180066 -
SLAM
+关注
关注
23文章
423浏览量
31815
原文标题:将制图师3D图形SLAM堆栈用于无人机导航
文章出处:【微信号:雨飞工作室,微信公众号:雨飞工作室】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
SKYLAB详解无人机GPS模块的作用及无人机gps模块选型
制作 2D 导航无人机比你想象的更容易
文博会 合肥造植保无人机亮相
SLAM技术目前主要应用在哪些领域
3D制图软件中怎么设计凸轮?3D设计凸轮教程
超声波传感可用于无人机应用的原因
解析3D打印无人机的三大最佳应用领域
Nano-Racing无人机:3D打印机身让装配更简单
高速飞行的无人机用SLAM怎样导航
全球最大的FDM 3D打印无人机
英国工程师发明无人机使用3D打印沥青修复道路
当3D打印应用在无人机有何不同?
基于3D设计和打印的单转子无人机方案





 工商网监
工商网监
评论