 协作机器人-功率和力限制
协作机器人-功率和力限制
PFL 代表 功率和力限制。PFL是机器人协同工作并成为协作机器人(协作机器人)的方式之一。PFL的本质是,即使机器人和人类接触,人类也应该不受伤害。当然,仅仅购买一个合适的机器人是不够的——如果机器人拿着皮下注射针头戳你的眼睛,那么再多的 PFL 也无法拯救你。因此,为PFL设计的机器人是协作PFL应用的必要条件,但不是充分条件。
让我们“备份总线”,回到开头。安全的首要任务是消除危险(固有安全的设计措施),或者如果无法做到这一点,请使用安全功能(保护)。如果安全功能不能充分降低风险,那么最后一个选项是“警告和通知”。标准中有以下图形的更全面版本(例如参见RIA TR R15.306-2016),但通常依靠人们阅读警告或佩戴特殊安全装备或跟踪设备处于层次结构的底端。
对于专为协作应用设计的机器人(我们称之为协作机器人),以尝试消除协作机器人通常具有的危险
漂亮的圆角,没有锋利的边缘或点
臂(机械手)和臂连接设计用于消除夹点
带衬垫的柔软外壳
可变形部件
机器人运动部件的质量最小化
不幸的是,虽然这些通常是有帮助的,但它们还不够,这就是PFL的用武之地,这就是它变得有趣的地方。通常的功能安全是避免伤害,例如手指被压碎或手臂骨折甚至死亡。那么机器人在造成伤害之前能有多难受。每天被打100次,但只是轻微的打击,这是可以接受的吗?100 次微小的撞击等同于一次非常好的推动吗?ISO TS 15066对此提供了一些指导,以帮助机器人安全标准ISO 10218:2011中已有的指导,并使用疼痛作为阈值而不是伤害。我当然想避免伤害,但我也不热衷于疼痛,所以就个人而言,我很高兴标准使用疼痛而不仅仅是伤害作为衡量标准。
然后,ISO TS 15066 给出了不同身体位置的限制,总共约 30 个。尽管上面图片显示了什么,但我相信志愿者被蒙住眼睛,有耳塞,所以他们不知道什么时候会有撞击。
两种类型的冲击被认为是瞬态的(无夹紧 - 发生在自由空气中)和准静态(夹紧)以及两者的限制。使用瞬态一词是因为所涉及的力达到峰值,然后在不涉及陷阱时迅速回落到零,对于准静态情况,力和压力将上升,然后当身体部位被夹紧时通常保持在那个高水平,直到你解放你的手。
最大许可准静态接触标准中的限制示例包括
上臂和肘关节 – 三角肌 150N 和肱骨 220N。
前臂肌肉 – 150N
手和手指一般为140N
小腿,包括胫骨中部 – 130N
该标准在与头部接触时似乎有些矛盾,说必须防止它,但仍然给出限制。如果无论力如何都可以与眼睛接触,则很难反对使用安全护目镜或类似物。然而,我确实在YouTube上看到了视频,这些视频似乎以协作机器人在桌子上以PFL模式工作,人们坐在他们旁边。对我来说,与操作员负责人的接触看起来完全不受阻碍。
我看过其他文章,说人头最弱的骨头是鼻骨,骨折力为342N,并引用337N作为颈部甲状腺和环状软骨的断裂力。
与PFL相关的安全功能的典型要求是PL d CAT 3,即使我讨厌看到强制要求类别。
与我在之前的博客中讨论的SSM相比,使用PFL的协作机器人通常移动得慢得多,这是因为功率和力与速度具有平方定律关系(速度加倍会使力翻两番)。因此,降低速度是限制撞击过程中功率和力的关键方法。该速度的测量和限制本身就是一项安全功能,必须达到或超过PFL模式要求的SIL或PL。机器人可以在没有人靠近时自由使用SSM(速度和分离监控 - 请参阅我最近关于该主题的博客),然后在有人靠近时切换到PFL模式。这样的组合可以提供最大的生产力。但是,请注意,有时仅将机器人放在笼子中可能会更有效率。
RIA R15.806中给出了功率受限协作应用的验证方法(我不确定这是否与ISO PAS 5672相同)。需要1N的最小分辨率和1KHz的带宽。YouTube上有视频,似乎显示机器人超过了这些限制。
最后警告 – 无论机器人/协作机器人内置的功能如何,应用程序都决定了一切。如果机器人拿着刀或杂耍炸药PFL不足以拯救你,你需要一种不同形式的安全(也许是不同的工作场所)。
AGV/AMR/IMR和其他移动机器人的标准没有这样的限制,但如果它们能与人碰撞,那么应用相同的限制似乎是合乎逻辑的,也许专注于小腿和小腿。
EN 16005涵盖自动门与ISO 10218 / ISO TS 15066中的限制相似,如果相对边缘之间的间隙为<400mm,则限制为200N,如果间隙为>1400mm,则限制为500N。
ISO 13482个人护理机器人标准也谈到了限制,这表明要求延伸到工业机器人之外。
我还看到了新标准的草案,ISO / DIS 21260,标题为“机械安全 - 移动机械或机械与人员运动部件之间物理接触的机械安全数据”,该标准遵循ISO 13849-1或IEC 62061限制接触条件的传感器和控制系统。该标准在附录C中还包含一个家用AGV的很好的例子。
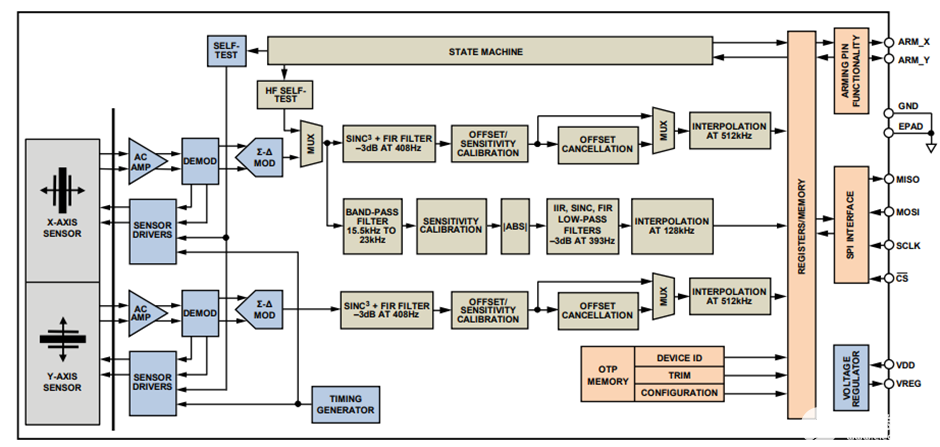
图4 - X轴上具有声通道的ADXL195加速度计
我了解了加速度计的功能安全性,一个明显的问题是加速度计是否在这一领域有用。那么问题就变成了,你能知道你撞到某物的力度有多大(你减速的强度有多大),甚至只是你是否及时撞到了某物以停止并可能倒车。这种汽车目标部件还可以在减速开始之前测量保险杠中任何变形的噪音(在汽车中可能效果更好)。如果我没记错的话,响应时间是 2 毫秒,安全气囊展开需要在 30 毫秒内完成。对于以5公里<行驶的mobot来说,30ms是大量的时间,2ms代表2.7mm的向前运动。有趣的是,像这样的传感器以与汽车前部成45度角安装在汽车中。因此,全正面碰撞应导致 X 轴积极响应,Y轴负响应,但数量相同。通过这种方式,您可以分辨出撞击发生的方向并展开安全气囊。对于一个mobot,我想你会停止移动或倒车。对于非常高的机器人,我相信如果碰撞发生在地面附近的激光扫描仪未检测到的架空架子上,这也应该有效。
ISO 5672的最新草案给出了一些可能发生意外影响的很好的例子,包括:
当有人认为机器人试图捡起的物体未对齐时,他们会把手伸到机器人抓手下面。然后,它们的手可以在夹具和桌子之间或夹持器本身内被压碎。
有人躲进去捡起机器人掉落的东西,当机器人移动时被机器人击中背部
有人在移动机器人翻车之前冲进去捡东西
所有这些似乎都是完全合理的,事实上,人性使它们难以避免,因此需要安全功能。
审核编辑:郭婷
-
传感器
+关注
关注
2551文章
51097浏览量
753508 -
机器人
+关注
关注
211文章
28418浏览量
207074 -
加速度计
+关注
关注
6文章
702浏览量
45897
发布评论请先 登录
相关推荐
MiR推出MC600移动协作机器人
协作机器人TM25S:高效人机协作改变传统作业方式

协作机器人要实现0.03mm路径精度有多难
优傲机器人升级高负载协作机器人,助力客户生产效率飞跃
海默机器人荣膺第十届恰佩克奖,展现协作机器人创新力量

海默机器人荣获“中国协作机器人创新产品奖”:创新引领,智造未来
「码」力十足,大族协作机器人更适合码垛应用
PCB行业:用协作机器人,就选大族机器人
富唯智能机器人集成了协作机器人、移动机器人和视觉引导技术
协作机器人和工业机器人对比
什么是协作机器人?为什么使用协作机器人?





 工商网监
工商网监
评论