 RPC如何在远程过程中调用?
RPC如何在远程过程中调用?
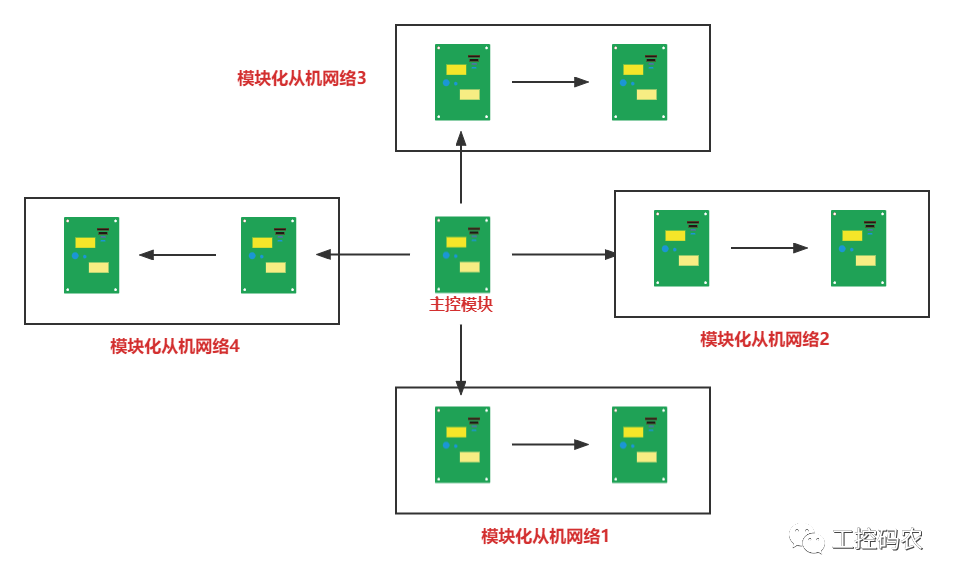
RPC(Remote Procedure Call Protocol)即远程过程调用,也就是调用的函数是在其它的控制板上运行的,不需要理会底层的通讯协议。现在大型设备通常有超过5块控制板,这些控制板通过485/CAN/以太网组成一个局域网。通讯协议可以使用Modbus或者自定义。。。
多模块组网,实现模块化,减少电气布线便于维护:
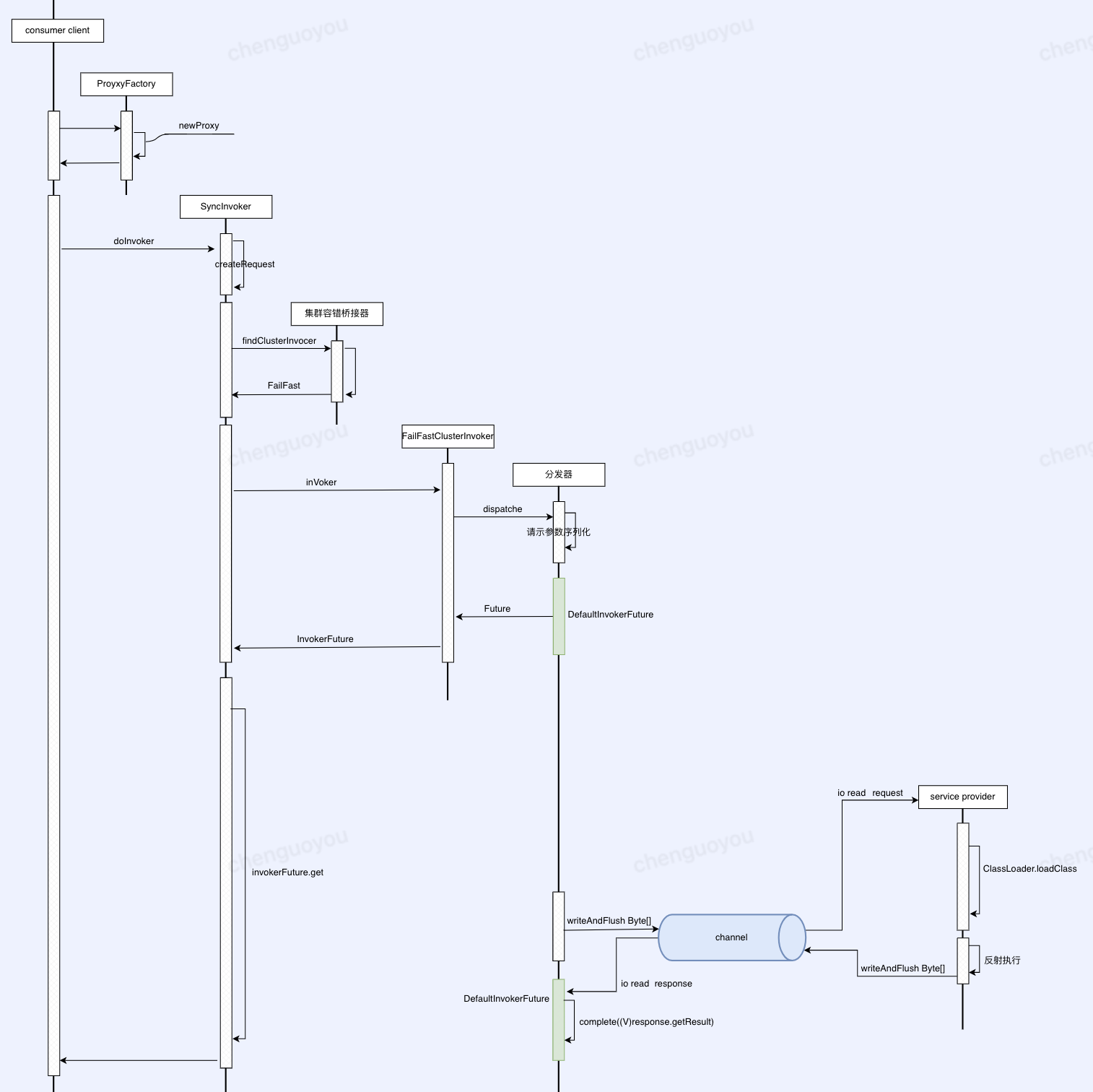
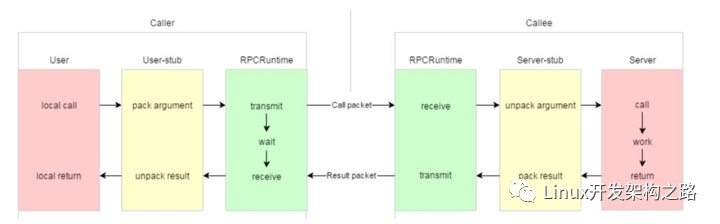
远程调用数据流:

这些控制板的硬件基本都一样(电机,传感器。。),底层驱动程序也一样,只是上层的业务逻辑的差别,在驱动层封装一层rpc,能进一步简化业务逻辑开发,使得控制从机的电机 动作和本机的函数接口一样.
动作 传感器映射
映射是把本地动作编号 传感器编号映射到从机模块的动作编号和传感器编号,这个是在上电初始化时完成.
enum
{
HOST=0,//本机编号
SLAVE1,
SLAVE2,
};
l->MapRemoteAction(201,SLAVE1,1); //动作201映射到从机1的1号动作
l->MapRemoteAction(301,SLAVE2,1); //动作301映射到从机2的1号动作
l->MapRemoteSensor(X201,SLAVE1,X01);//把传感器X201映射到从机的X01
SLAVE1,SLAVE2是从机模块编号,通常是电路板上的拨码开关决定的.RPC组包时会把这些模块编号放在头部.
业务代码:
start(App):
l->WaitAction(201,STEP2,STEP_ERROR); //执行从机1动作201,动作正确完成就跳到step2,错误step_error
step2:
if(l->IsSenorOn(X201)) //从机1号传感器感应
{
l->WaitAction(301,STEP_OK,STEP_ERROR); //执行从机2的动作
}
else
{
l->SetActionOk();
}
step_ok:
l->SetActionOk();
step_error:
l->SetSubError();
end
上面的业务代码是没有任何通讯相关的流程,只是一些简单的函数调用和本地函数调用一模样
RPC层
RPC层主要完成数据组包,实时数据通讯,从机的动作 电机运动都是耗时过程,需要一定的时间才能完成,那么主机端的rpc层就需要不断查询从机的状态.App调用从机的动作时就同步等待从机的状态变化后继续向下执行.软件实现上需要单独一个线程或者类似于switch-case实时处理rpc的工作流程.

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
RPC
+关注
关注
0文章
111浏览量
11725 -
函数
+关注
关注
3文章
4364浏览量
63805 -
通讯协议
+关注
关注
10文章
283浏览量
20652
发布评论请先 登录
相关推荐
TSMaster RPC 基础入门:编程指导和使用说明
介绍RPC模块前,我们先浅聊一下RPC的相关说明,以及在什么样的情况下需要了解本文。1.RPC说明远程过程调用(RPC,RemoteProc

如何手搓一个自定义的RPC 远程过程调用框架
1、RPC(远程过程调用概述) 远程过程调用(RPC, Remote Procedure Call)是一种通过网络从远程计算机程序上请求服务
【学习打卡】OpenHarmony的RPC连接介绍
。远程过程调用 (RPC)是一种用于构建基于客户端-服务器的分布式应用程序的强大技术。它基于对传统本地过程调用的扩展,因此被调用过程不必与
发表于 07-28 18:13
什么是RPC
什么是RPC 英文原义:Remote Procedure Call Protocol
中文释义:(RFC-1831)远过程调用协议
注 解:一种通过
发表于 02-23 11:48
•940次阅读
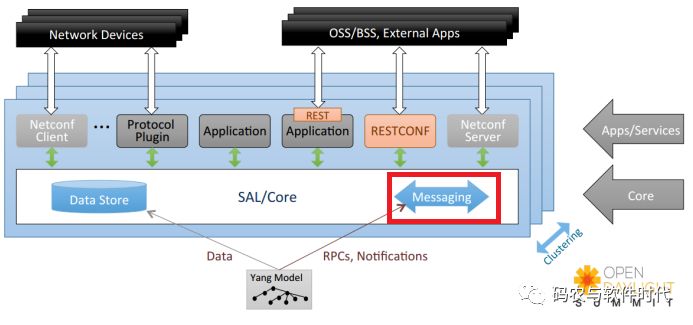
OpenDaylight中的RPC & Notification是什么
我们将介绍RPC和Notification,并从进程内外的通信开始,着重介绍远程过程调用和发布-订阅机制,然后分析MD-SAL的通信交互过程。
RPC接口与HTTP接口哪一个更好?
HTTP接口和RPC接口都是生产上常用的接口,顾名思义,HTTP接口使用基于HTTP协议的URL传参调用,而RPC接口则基于远程过程调用。
发表于 06-13 09:18
•1567次阅读

基于Client/Server架构的HTTP接口和RPC接口
HTTP接口和RPC接口都是生产上常用的接口,顾名思义,HTTP接口使用基于HTTP协议的URL传参调用,而RPC接口则基于远程过程调用。
发表于 06-13 09:18
•899次阅读

RPC接口和HTTP接口的区别与联系
基于远程过程调用。 RPC(即Remote Procedure Call,远程过程调用)和HTTP(HyperText Transfer Protocol,超文本传输协议),两者前者是一种方法,后者则是一种

什么是远程过程调用
开发环境:Ubuntu VS Code 编译器:g++ 编程语言:C++ 框架源码下载:GitHub 认识RPC RPC的全称是远程过程调用(Remote Procedure Call
Dubbo源码浅析(一)—RPC框架与Dubbo
一、什么是RPC 1.1 RPC概念 RPC,Remote Procedure Call 即远程过程调用,与之相对的是本地服务调用,即LPC
RPC的基本原理和主要特点
RPC(Remote Procedure Call,远程过程调用)机制是一种常用的通信机制。实际上就是要像调用本地的函数一样去调远程函数。






 工商网监
工商网监
评论