 如何仿真PID?
如何仿真PID?
上篇文章说到,PLCSIM Advanced很强,强大到可以仿真很多东西,那么这篇文章就来说说如何仿真PID。
使用方式请参见这一期文章
-
准备
1.1_需要使用到一个LSim仿真库,没有的同学请关注公众号并回复Lsim
-
下载LSim_LIB_V3_0_0,此版本是V14,更低版本可以下载V2_0_1版本。如图一。
图一
-
使用方式
2.1_打开博途,右侧点击库,然后打开库,找到对应的库,将其打开即可。如图二。
图二
2.2_在博途项目树,程序块中,点击添加新块,选择组织块,添加一个循环中断组织块。如图三。
图三
2.3_点击工艺对象,新增一个工艺对象,选择PID,创建一个PID_Compact。如图四。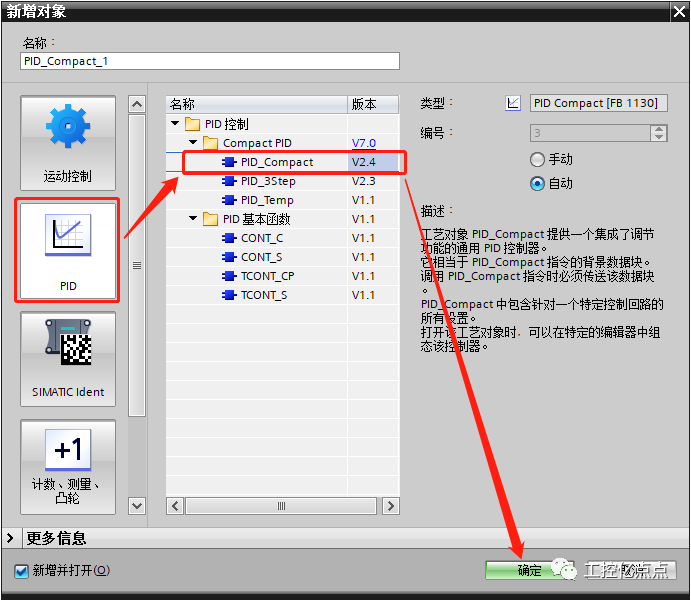
图四
2.4_参数配置,此处以温度为例,CPU重新启动后激活Mode选择为自动模式,如图五。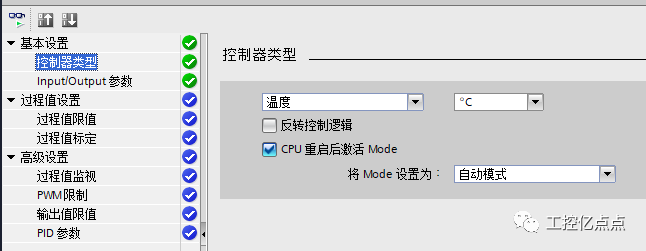
图五
2.5_Input/Output参数,需要更改为Input和Output。如图六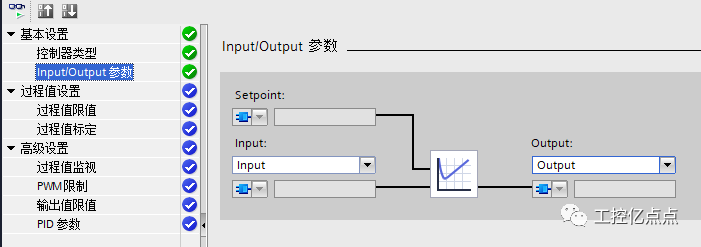
图六
2.6_其余参数可以根据自己需要自行更改。此处只更改两个设置 -
PID块调用
从左侧工艺指令中找到PID,打开Compact PID,找到PID_Compact块,拖到循环中断中,单个实例选择刚才创建的PID_Compact_1实例。如图七
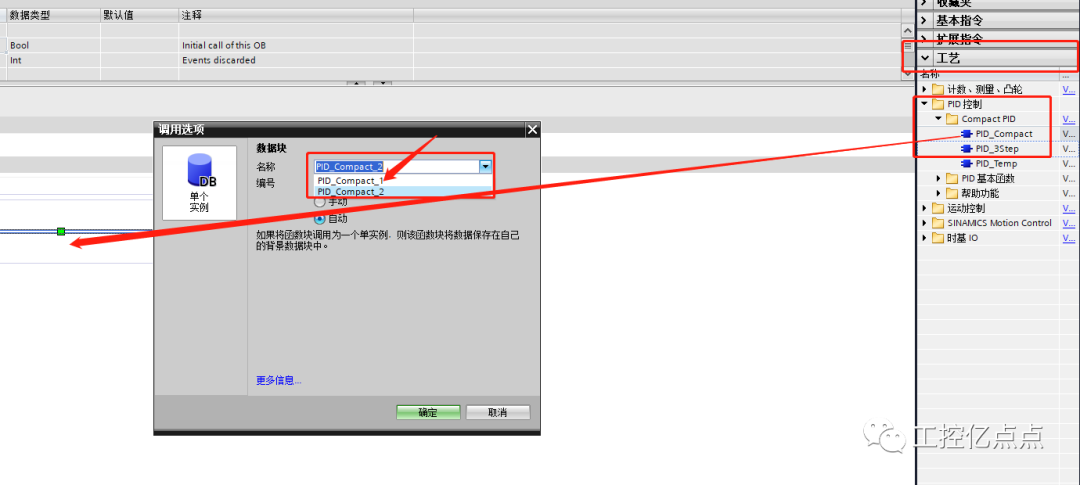
图七
-
仿真块调用。将LSim_PT1拖入循环程序中,并创建实例。如图八
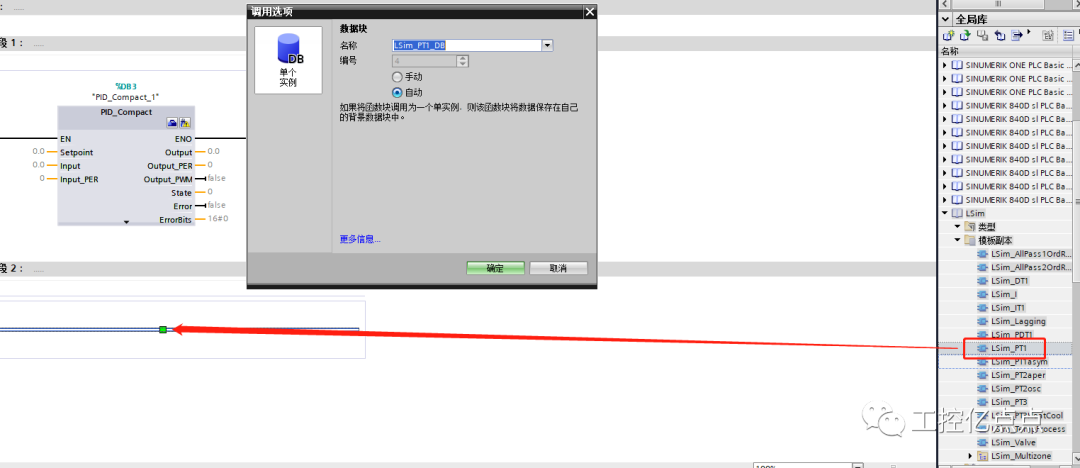
图八
-
PID和仿真块参数填写。将PID_Compact_1的输出参数Output填写到LSim_PT1的输入参数Input。将LSim的输出参数Output填写到PID_Compact_1的输入参数Input中。如图九。
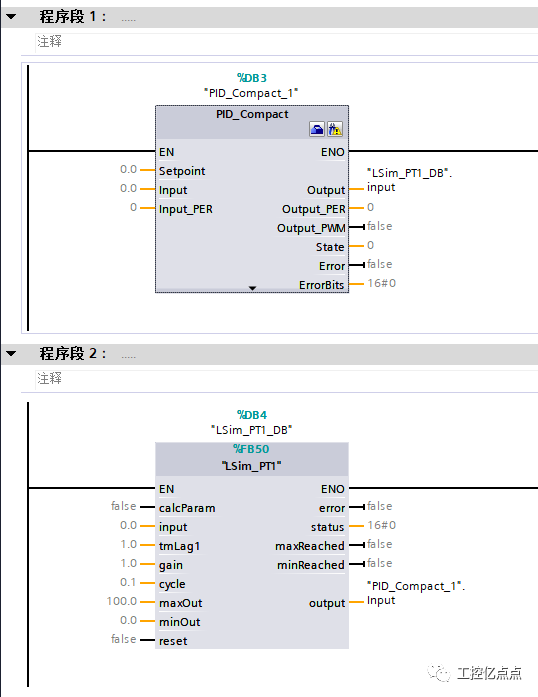
图九
-
下载仿真测试。将程序下载进PLC中并运行PLC
-
打开工艺对象,选择调试,并打开调试界面并监控。如图十
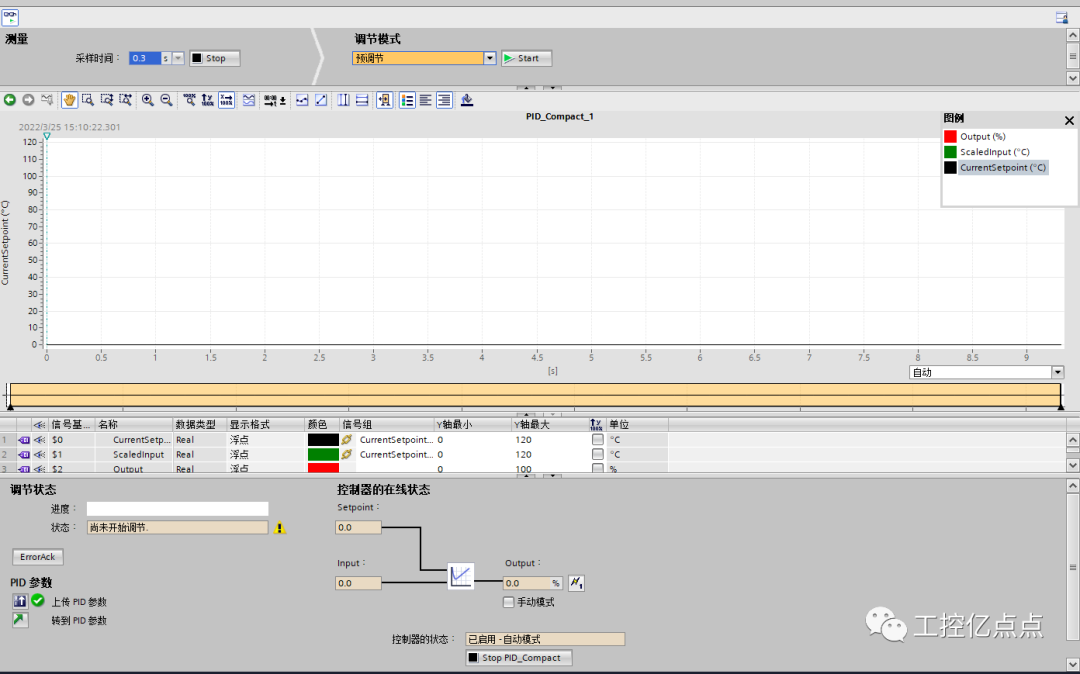
图十
-
打开PID_Compact_1的背景数据库,在Setpiont中设定一个数值。如图十一。
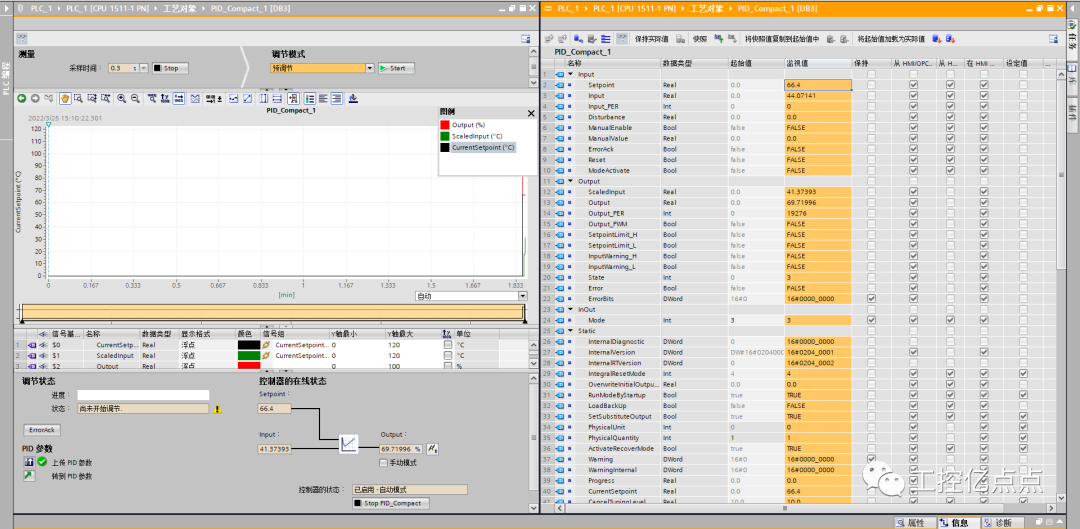
图十一
-
此时,可以针对这个PID进行预调节,如图十二。












图十二
11. 如果调节完成,则会显示系统已调节如图十三

图十三
12. 预调节有条件,过程值过于接近设定值,则无法进行预调节,具体要求可参见F1帮助,在此不做详细叙说。
13. 接下来则可以进行精确调节,精确调节时间较长,可能需要稍微等待一会。如图十四

图十四
14. 调节完毕,一样显示系统已调节。但是要做一步"上传PID参数"。如图十五

图十五
15. 上传完成之后,按钮左边变成绿色。如图十六

图十六
16. 此时PID参数已经整定完成,并以整定的PID参数来运行这个PID。
小结:PID参数也可以放到HMI上做整定,官方也有这个详细说明,此处不再做详细说明去实现这个做法。包括自整定,都可以放到上位机上去做。
-
PID
+关注
关注
37文章
1479浏览量
86872 -
参数
+关注
关注
11文章
1865浏览量
32751 -
HMI
+关注
关注
9文章
620浏览量
49454
发布评论请先 登录
相关推荐
哪位大神会boost电路pid仿真?我有个小问题不太懂






 工商网监
工商网监
评论