 激光雷达的正确使用方法 2
激光雷达的正确使用方法 2
2)选择合适的安装位置与数量
目前,激光雷达上装的具体位置存在很大的差异,比如车顶上方、车前灯两侧、车尾等。那具体装在哪个位置合适以及装多少颗?如何做设备的后期维护?这些问题都是要考量的。
第一,一定程度上保证整体美观度。 美观的整体外形设计与产品自身的造型是首要的考虑因素。
激光雷达前装量产的首要条件,一定是要保证车辆的外观设计。某L4自动驾驶企业产品经理凭借其多年在主机厂的从业经验说道:“主机厂地位很强势,对造型的要求也很高,激光雷达安装的位置是由设计部和研发部协商的结果。”
除了保证车辆的整体外观设计外,由于每款激光雷达产品的造型不同,致使可供安装的位置也有不同。这位产品经理继续说道:“每家激光雷达厂商的产品形状、大小都是不同的,比如速腾的M1安装在前挡风玻璃上方会更好。但如果前挡风玻璃上方没有相应的域控制器的话,那这个位置也不允许安装,或许会安放在车前灯下方两侧。”
从现存的激光雷达上装情况来看,安装在车顶上方的激光雷达,其形状普遍具备长而扁的特征,这类形状更适合安装在车前挡上方,比如Luminar Iris这款产品体积足够小,更易于集成在车前挡上方。安装在车前灯两侧或者保险杠中部的激光雷达,体积相对较大(尤其是高度较高),比如大疆的HAP,若是安装在车前挡上方,容易破坏车辆整体的美观度,所以更适合安装在车前灯两侧。
表:部分激光雷达的代表车型和安装位置
| 激光雷达产品 | 代表车型(安装位置) | |
|---|---|---|
| Luminar(Iris) | 上汽R7(车前挡上方) | |
| 大疆(HAP) | 小鹏P5(车前灯两侧下方各1个) | |
| 图达通(猎鹰) | 蔚来ET7(车前挡上方) | |
| 华为(96线中长距) | 极狐阿尔法(保险杠的中部以及两侧各1个) | |
| 速腾聚创(M1) | 小鹏G9(车前灯两侧下方各1个) | |
| 资料来源:公开信息整理 |
第二,不同位置实现不同功能。 从功能的角度来说,安装在车前挡上方位置可以兼做感知和定位,而车前灯下方两侧的位置则更适合感知功能。
智加科技中国首席科学家崔迪潇解释道:“装在什么位置,具体是看做什么功能。如果是要做感知,放在车前灯下方两侧位置更合适。如果是做定位,放在车前挡最上面会更好。
放在最上面的激光雷达会看得更高更远,但这是一个相对的概念,取决于算法的需求。例如感知算法通常更关注路面上的动态交通参与者,某些定位算法更关注路面之外的建筑物,两类算法的要求可以通过激光的不同安装来分别满足。”
探维科技品牌总监张立辰继续补充道:“激光雷达安装在车前灯下方的位置,主要功能是补充或辅助性避障,但下方的位置存在无法避免的盲区问题。而上方的位置可以是感知功能也可以是定位功能,但定位功能需要360°的信息,单颗半固态激光雷达必然不能实现定位功能。”
结合两位专家的观点,笔者认为,激光雷达放在下方的话,两颗激光雷达覆盖的感知范围也较大,其感知功能相对较强,可以更适合多变、复杂的城区场景;而放在上方的话,普遍是单颗激光雷达,市场上的普遍水平视场角在120°,可覆盖的感知范围必然不会比下方广,但上方的激光雷达产品主要是1550nm的远距离产品(比如Luminar的Iris或者图达通的猎鹰),视线能看得更远,更适合高速场景。
第三,场景需求决定安装数量。 安装激光雷达的数量取决于需要满足的感知范围和场景功能。
越来越多的车辆开始上装激光雷达,有些车辆甚至多达4颗,那一辆自动驾驶车辆上到底需要安装多少颗激光雷达?对此,智加科技中国首席科学家崔迪潇解释道:“因为激光雷达自身的原理特性,所以导致了它无法做到所有的功能。那么单个激光雷达在使用过程中无法实现多个功能,只有通过多个激光雷达才可以把自动驾驶车辆需要的功能全部覆盖。这也就是为什么高阶的自动驾驶功能需要装这么多的激光雷达,甚至有些堆了四个激光雷达。”
从这一点上,笔者也在思考:是不是装的越多越好?而在这种趋势下,会不会引起激光雷达数量的军备竞赛?均胜电子副总裁郭继舜解释道:“在成本允许的前提下,安装激光雷达必然能够提升系统稳定性和自动驾驶的安全性,至于装多少颗,主要取决于需要增加的具体功能。至于军备竞赛的说法,现阶段远远还没有来临。哪怕军备竞赛真的到来,规模化也会带来成本的下降。”
总的来说,一款激光雷达无论装在车前后四角还是车顶,单颗激光雷达都无法满足车辆安全行驶的要求。出于这点考虑,市场上大部分中短距离激光雷达都是安装2个及以上,以求获得更广的视野范围,并且主要是前向方向。
对此,某L4自动驾驶公司资深从业者解释道:“大家都在做前装量产,所以才尽可能抛弃机械式激光雷达,而做一些内嵌式的激光雷达。但是内嵌式的激光雷达水平视场角必然不会达到360°,比如大疆的HAP和速腾的M1,水平视场角都为120°,相对机械式的激光雷达来说,它们的视场角很小,所以使得车辆需要装多个激光雷达。”
第四,做好后期维护。 从后期的维护角度来说,安装在不同位置实现清洗、防撞、热管理等功能的难易度不同。
安装在上方,好处是易清洗、防撞,但不易做热管理。装在车灯下方的位置的话,最大的缺点是容易被撞,一旦被撞设备几乎无法维修,而更换的成本会很高。也有一些车企选择装在车灯附近的进气格栅内,总体来看,这是最不理想的位置,容易被撞,还不容易清洗。
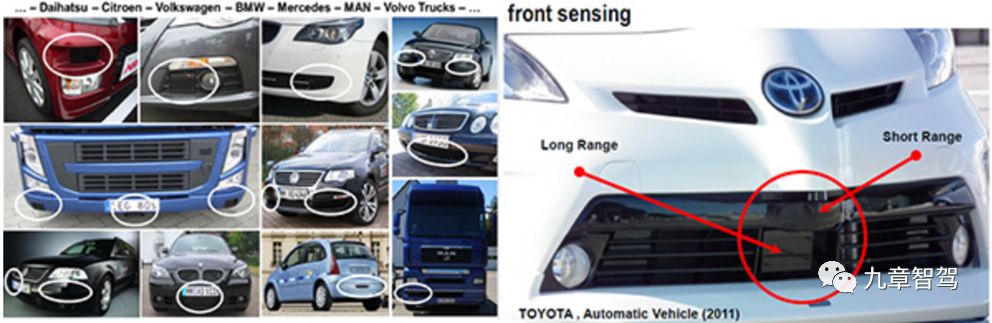
图:部分车型中进气格栅的安装位置
(图片来源:公开信息)
3)优化工作时间、降低功耗,提升设备耐久性
上文中也提到了激光雷达的耐久性问题比较突出,但可以从优化工作时间与降低功耗两个角度,提升激光雷达的耐久性,减少维修和更换的成本。
首先,对于乘用车来说,可以在非工作时间内让设备“休息”,提升设备的耐久性。
某自动驾驶初创企业产品经理说道:“商用车的激光雷达使用寿命相对乘用车来说会更短,因为工作时长的原因,激光雷达需要始终保持运行状态。但乘用车并不需要24小时全天候的工作,可以有效地降低激光雷达使用时间,在某个不需要激光雷达场景的条件下,可以适当的关闭激光雷达,通过电源管理的方式,实现使用时间的优化。”
其次,从软硬件两个角度,降低激光雷达的功耗问题。
从硬件的角度来看,探维科技品牌总监张立辰告诉《九章智驾》:“后装市场的话,通过改善外壳材质、颜色、体积、或加装排热风扇的方式,改善功耗问题;前装市场的话,主要依靠主机厂或者tier 1去设计激光雷达产品的体积和安装位置,从而改善功耗问题。”
从软件的角度来看,某传感器行业专家提道:“可以通过优化芯片架构、优化算法的方式降低功耗。”
优化工作时间和降低功耗是提升激光雷达耐久性的最基础的方式,除此以外,热管理功能也会是提升功耗的一种方式,但热管理主要是针对极端环境而言,并不是一个共性问题。
4)提高不同场景下的数据采集效率
提高激光雷达的数据采集效率,减少重复区域内的数据采集工作,关注更有价值的数据。
某自动驾驶初创企业产品经理说道:“如果车辆一直在某一个相同区域内行驶,数据的重复度会比较高,无用的数据就会过多,最终只能得到重复累加的数据。相对于此,更应该搜集算法遇到问题时候的数据,比如在这前后十分钟或者五分钟的数据,这类稀缺的数据是对算法训练最有价值的数据。”
笔者认为能做到高效的数据采集,首先是场景的选择,比如高速场景下采用ROI功能,动态调整激光雷达的角分辨率,将感知区域集中在车辆前方,增加前方重点区域的点云密度;其次是激光雷达自身算法的优化,通过不断地数据积累,过滤掉工况下的重复信息。
5) 配合短距激光雷达会更好
笔者发现当前市场上新推出了多款短距激光雷达,从市场上现已公布的一些产品数据来看,短距激光雷达覆盖了各种不同的扫描技术路线,包括MMT、Flash、机械式,主要的特点是测距相对较短,一般为50米范围以内。
这不禁让笔者产生了一个思考,为何需要短距激光雷达?在如此短的距离内,短距激光雷达的主要优势是什么?
表:部分短距激光雷达产品信息整理
| 性能参数 | 激光雷达供应商/产品名 |
|---|---|
| Cepton-Nova | XenomatiX-短距 |
| 激光光源 | 905nm |
| 扫描方式 | MMT |
| 探测距离 | 30米@10%反射率 |
| FOV | 120°*90° |
| 角分辨率 | 0.3°*0.3° |
| 点云密度 | — |
| 功率 | <3.5W |
| 点频 | — |
| 资料来源:公开信息整理 |

图:QT128探测动态运动的乒乓球
(图片来源:https://mp.weixin.qq.com/s/ciV0BqYNgKahEfdXtQjHeA)
智加科技中国首席科学家崔迪潇介绍说:“短距激光雷达的使用与场景有一定相关性,主要是用于相对低速的环境下。要实现高阶的自动驾驶功能,就必须依靠更多种类的激光雷达。
有些场景下可能只有两层冗余,这必然不能满足高阶自动驾驶的冗余需求,所以才会有了短距激光雷达。从功能上来说,短距激光雷达有效覆盖范围只有50米,所以它对定位不一定有用,只有补盲作用。”
除了激光雷达主要的探距功能外,短距激光雷达主要是起到了补盲雷达的作用,通常安装在车头、车前后四角、左右两侧等位置。
但如果只是补盲的话,为何不直接采用摄像头或者毫米波雷达?
某自动驾驶资深从业者解释道:“短距激光雷达功率相对较小,成本也会较低。比如在泊车环境下,单目摄像头的深度信息相对较弱,但通过短距的激光雷达可以补充这些深度信息,能帮助车辆获取与障碍物的距离信息,这是它的重要功能之一。”
综合来看,短距激光雷达具备低成本、低功率、宽视场角等特征。相比于长距激光雷达而言,短距激光雷达需要解决的并不是更远处的场景,而是近处的场景,比如在城区环境下,车辆往往只处于低速环境下,并不需要特别关心150米甚至200米以外的环境信息。
相比于其他传感器,短距激光雷达对于近处的补盲效果会更好,既弥补了毫米波对于金属的不够敏感,也弥补了视觉对于光照的影响,同时短距雷达的位置,一般也会覆盖摄像头的感知范围,可以实现多传感器的融合异构方案。
结语:
激光雷达前装量产后,使用过程中暴露出的问题也慢慢浮出水面。第一,统一的车规级标准是激光雷达亟须解决的首要问题;第二,在一些特定场景下,如雨雾雪等气候环境下或者重复性较高的场景下,激光雷达的使用效果会大打折扣;第三,激光雷达在使用层面,产品的耐久性和可靠性问题也很突出,无法覆盖产品承诺的生命周期;第四,激光雷达厂商的售后服务体系也尚未成熟,现有的售后服务水平很难满足行业后期的大规模量产;第五,未来的环境安全问题也值得重视,尤其是在激光相互对射的串扰与人眼安全两方面。
此外,笔者以一个使用者的角度总结了正确使用激光雷达的方法:第一,是需要选择合适的产品和激光雷达厂商,包括产品是否符合车规要求、激光雷达厂商是否具备完善的售后服务等;
第二,选择合适的安装位置与数量,包括安装在不同位置主要的影响因素、安装数量与场景和需要实现的功能之间的联系等;
第三,通过优化工作时间、降低功耗,从而提升产品耐久性,增加产品的生命周期;第四,通过动态调整角分辨率的方式,实现ROI功能,提高某些场景下的数据采集效率,比如高速场景下,可以重点关注车前方的行驶区域;第五,可以尝试安装短距激光雷达,其具备低成本、低功率、宽视场角等特征,同时可为车辆提供补盲的作用。
激光雷达使用过程中存在的问题可能不止上述5点,随着渗透率的逐步提升,相关问题也会慢慢呈现出来。但笔者相信,国内自动驾驶行业正在加快发展步伐,而激光雷达已成为高阶自动驾驶车辆必不可少的关键传感器之一。
参考文献
【1】深度|智能驾驶:激光雷达成为L3/L4焦点,自动驾驶显现千亿新蓝海
https://mp.weixin.qq.com/s/9RdwCG3qf9hE3X5wiiy_QA
【2】golang+webgl实践激光雷达(一)激光扫描仪基础知识
https://www.cnblogs.com/laofenmao/p/12052290.html
【3】激光雷达波长:905nm VS1550nm
https://www.cmpe360.com/p/120214
【4】激光对人眼的损伤分析,李强 何炳阳
-
激光雷达
+关注
关注
970文章
4142浏览量
191528 -
自动驾驶
+关注
关注
788文章
14117浏览量
168761 -
大疆
+关注
关注
30文章
909浏览量
82929
发布评论请先 登录
相关推荐
空间激光雷达最小接收光功率的计算
激光雷达分类以及应用
常见激光雷达种类
激光雷达面临的机遇与挑战
消费级激光雷达的起航
固态设计激光雷达
激光雷达除了可以激光测距外,还可以怎么应用?
机器人和激光雷达都不可或缺
TOF激光雷达
激光雷达知多少:从技术上讲讲未来前景
由iphone12说说激光雷达 FMCW激光雷达 精选资料分享
激光雷达的正确使用方法 1





 工商网监
工商网监
评论