 入门必看机器视觉详解1
入门必看机器视觉详解1
机器视觉详解及入门必看
机器视觉系统具有高效率、高度自动化的特点,可以实现很高的分辨率精度和速度。机器视觉系统与被检测对象无接触,安全可靠。人工检测与机器视觉自动检测的主要区别有:
01.【系统组成】
一个典型的机器视觉系统包括以下部分:
1.照明
照明是影响机器视觉系统输入的重要因素,它直接影响输入数据的质量和应用效果。由于没有通用的机器视觉光源照明设备,所以针对每个特定的应用实例,要选择相应的照明装置,以达到最佳的效果。
光源可分为可见光和 不可见光 ,常见的几种可见光源有白炽灯、日光灯、水银灯和钠光灯。可见光的缺点是光能不稳定。所以如何使光能在一定的程度上保持稳定,是目前急需解决的问题;另一方面,环境光有可能影响图像的质量,所以可采用加防护屏的方法来减少环境光的影响。
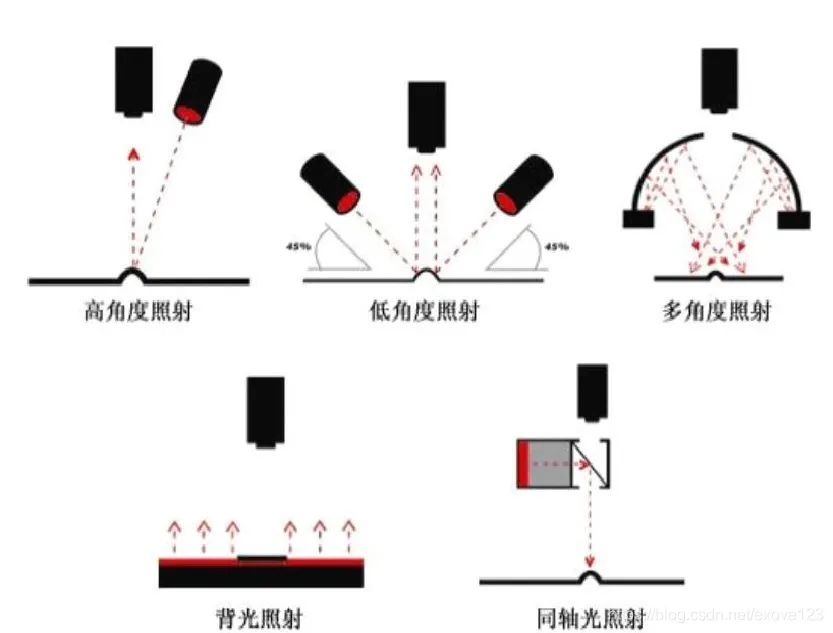
照明系统按照照射方法可分为:背向照明、前向照明、结构光和频闪光照明等。其中,背向光照明是被测物放在光源和摄像机之间,它的优点是能获得高对比度的图像;前向照明是光源和摄像机位于被测物的同侧,这种方式便于安装;结构光照明是将光栅或光源等投射到被测物上,根据它们产生的即便,调解出被测物体的三维信息。频闪光照明是将高频率的光脉冲照射到物体上,摄像机拍摄要求与光源同步。
02.镜头
工业镜头
FOV(Field Of vision)=所需分辨率亚像素相机尺寸/PRTM(零件测量公差)
选择镜头需要注意:
①焦距②目标高度③影像高度④放大倍数⑤影像至目标的距离⑥中心点/节点⑦畸变
03.相机
按照不同标准可分为:标准分辨率数字相机和模拟相机等。要根据不同的实际应用场合选不同的相机和高分辨率相机:线扫描CCD和面阵CCD、单色相机和彩色相机。
04.图像采集卡
图像采集卡只是完整的机器视觉系统的一个部件,但是它扮演一个非常重要的角色;图像采集卡直接决定了摄像头的接口:黑白、彩色、模拟、数字等。
比较典型的是PCI或AGP兼容的捕获卡,可以将图像迅速地传送到计算机存储器进行处理,有些采集卡有内置的多路开关。例如,可以连接8个不同的摄像机,然后告诉采集卡采用那一个相机抓拍到的信息。有些采集卡有内置的数字输入以触发采集卡进行捕捉,当采集卡抓拍图像时数字输出口就触发闸门。
05.视觉处理器
视觉处理器集采集卡与处理器与一体。以往计算机速度较慢时,采用视觉处理器加快视觉处理任务,现在由于采集卡可以快速传输图像到存储器,而且计算机也快多了,所以现在视觉处理器用的较少了。
【工业镜头】
1.工业镜头的接口:
C型:C型接口镜头与摄像机接触面至镜头焦平面(摄像机CCD光电感应处的位置)的距离为17.5mm
CS型:CS型接口距离为12.5mm,CS型镜头与CS型摄像机可以配合使用。C型镜头与CS型摄像机之间增加一个5mm的C/CS转接环可以配合使用,CS型镜头与C型摄像机无法配合使用。
F型:通用型接口,一般适用于焦距大于25mm的镜头。

【基本参数】
视场:即FOV,也叫视野范围,指观测物体的可视范围,也就是充满相机采集芯片的物体部分。
工作距离:即WD,指从镜头前部到受检测物体的距离,即清晰成像的表面距离。
分辨率:图像系统可以测到的受检验物体上的最小可分辨率特征尺寸,在多数情况下,视野越小,分辨率越好。
景深:即DOF,物体离最佳焦点较近或比较较远时,镜头保持所需分辨率的能力。
焦距(f):是光学系统中衡量光的聚集或发散的度量方式,指从透镜的光心到光聚焦之焦点的距离,也是照相机中,从镜片中心到底片或CCD等成像平面的距离。
焦距大小的影响情况:焦距越小,景深越大;焦距越小,畸变越大;焦距越小,渐晕现象越严重,使像差边缘的照度降低。
失真:又称为畸变,指被摄物平面内的主轴直线,经光学系统成像后变为曲线,则此光学系统的成像误差称为畸变,畸变像差只影响影像的几何形状,而不影响影像的清晰度。
光圈与F值:光圈是一个用来控制镜头通光量的装置,它通常是在镜头内,表达光圈大小我们是用F值,如f2,f4。
-
机器视觉
+关注
关注
162文章
4426浏览量
121000 -
人工检测
+关注
关注
0文章
9浏览量
10734 -
工业相机
+关注
关注
5文章
332浏览量
23902
发布评论请先 登录
相关推荐
限时免费领取\LabVIEW机器视觉基础篇—7天入门
Labview三节课之第一节:机器视觉入门
基于视觉的机器人SLAM入门实践
机器视觉与图像分析技术详解






 工商网监
工商网监
评论