 KUKA:接通运动的碰撞识别
KUKA:接通运动的碰撞识别
碰撞识别概览
如果一个机器人与一个物件发生碰撞,则机器人控制器将提高轴扭矩,以便克服阻力。这时可能会损坏机器人、工具或其它零部件。
碰撞识别将减小此类损坏的风险。碰撞识别系统监控轴转矩。如果该转矩超过极限值,将出现以下反应:
•机器人以 STOP2停止。
•信息 确认轴 {轴编号}的碰撞识别
•机器人控制器调用程序 CollDetect_UserAction。
程序位于文件夹 R1Program中。默认情况下,它不含指令。在需要 时,用户可以在CollDetect_UserAction中编程其所需的反应。对此的前提条件是专家或更高级别的用户组。
碰撞识别的基本前提是:
• $IMPROVED_COLLMON ==TRUE
•负载数据正确。
TORQMON (旧的)
在早期 KSS版本中的程序中可能仍使用通过行指令 TORQMONSetLimits 编程的力矩监控。该监控基本上仍功能正常并且显示出其早期特性。
但是,前提条件是:$IMPROVED_COLLMON == FALSE。因此,当前版本的碰撞识别不可用。
基本上只能使用旧的力矩监控 (TORQMON) 或者当前的碰撞识别。不能一起使用这两个功能。
即使在 $IMPROVED_COLLMON == FALSE 时,也不(!)可再编程之前的行指令 TORQMON。
在碰撞之后继续运行
如果有信息 确认轴 {轴编号} 的碰撞识别,则在可以重新运行机器人之前, 必须对其进行确认。如果不再有 $STOPMESS,信号 $COLL_ALARM 重新变为FALSE。
程序运行下的继续运行:
如果在识别到的碰撞之后继续程序运行(通过启动或启动反向),则该识别立即重新激活。
手动运行下的继续运行:
如果要在识别到的碰撞之后手动运行,则自动中断识别 60 ms。
安全回退
在碰撞之后,作用力和力矩对机器人轴的作用很强,使识别功能可以持续地防止继续运行。用户必须手动退回机器人,即从碰撞位置移出。
有以下方法退回机器人:
•通过运行键(手动移动选项,选项 轨迹)反向运行
自动取消碰撞识别 1 秒。机器人延之前运行的轨迹返回。
•手动移动选项,选项 跨接碰撞识别
用户可以通过复选框跨接即停用碰撞识别。在通过复选框重新激活之前保持不激活状态。
接通通用碰撞识别
操作步骤:接通
1. 选择指令 》 移动参数 》 碰撞识别。
2. 在行指令中选择条目 UseDataSet。
3. 在 DataSet 栏内选择应用于碰撞识别的数据组。

4. 按下 指令 OK 确认。
操作步骤:关断
1. 选择指令 》 移动参数 》 碰撞识别。在行指令中选择 Off。

2. 按 指令 OK 键确认。
为了接通运动的碰撞识别功能,用户可在运动行指令中选择一个数据组。同时接通了通用和运动上的碰撞识别:
可能同时接通了通用碰撞识别和运动碰撞识别。运动上的设置将覆盖通用设置。
样条段:
在样条组内,默认情况下样条段继承该样条组的设置。但是,用户可以为每个段进行单独的设置。
操作步骤:
1. 如果在行指令中不显示栏 ColDetect,则可以通过 切换参数》 碰撞识别进行显示。
2. 在行指令的 ColDetect下选择数据组。
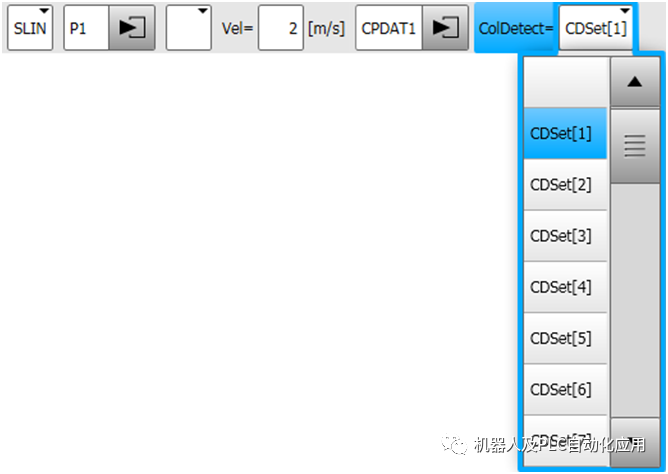
3. 用 指令 OK确认选择。
在编辑器中,该指令现在包含补充ColDetect[编号]。

带 ColDetect 的指令,例如SLIN 单个运动
空栏
在带数据组的列表的顶部有一个空栏。如果选择该空栏,这表示:
• 此运动没有自己的碰撞识别设置。如果接通了通用碰撞识别,则它将继承其设置。
在样条段中,该列表不含空栏。
如果希望样条段没有自己的设置,则在必要时通过 切换参数 》 碰撞识别 隐藏 ColDetect 栏。但是,对于段“隐藏”已经是默认状态。
OFF
仅对于样条段,数据组列表含有 OFF 条目。OFF 将关闭该段的碰撞识别。
在编辑器中显示样条设置
SPLINE S1 VEL=2 m/s CPDAT2 Tool[1] Base[1] ColDetect[1]
SLIN P2
SLIN P3 ColDetect[2]
SLIN P4 ColDetect=OFF
ENDPLINE
设置 ColDetect[1] 适用于样条组。
SLIN P2 没有自己的设置。这表示它将继承样条组的设置,即ColDetect[1]。
ColDetect[2] 适用于 SLIN P3。
为 SLIN P4 关闭了碰撞识别。
显示当前值/窗口 碰撞识别 - 视图
在主菜单中选择配置 》 碰撞识别 》 视图。
碰撞识别 - 视图 窗口打开。

序号说明
1轴编号
2每个轴当前极限。这是程序运行的极限还是手动运行的极限,取决于机器人移动的方式。 该值越小,识别越灵敏。“0”表示该轴的识别未激活。此外,在学习模式下,学习模式偏差显示为灰色。
3• 数字:当前峰值 • 黑色垂直线条:配置的激活极限 • 灰色垂直线条:有效极限 只有在学习模式和手动运行模式下,有效极限与配置的激活极限有所不同。 学习模式:极限由学习模式偏差决定。 手动运行:极限通过手动移动选项窗口中的 标准值偏量确定。 • 彩色条:相对于极限的峰值绿色:峰值位于极限以下 红色:峰值达到或超过极限。已识别到碰撞。
4显示适用于当前运动的数据组。 手动运行模式下还会显示点动信息。BCO 运行始终和手动运行数据一起执行。所以,也会在 BCO 运行期间以及直接在 BCO 运行后显示点动。
5显示最后一次峰值完成重置的时间点。
序号说明
6• 灰色:当前运动时碰撞识别未激活。 • 绿色:当前运动时碰撞识别已激活。
7• 红色:控制系统识别到碰撞。 • 灰色:无碰撞。 如果碰撞识别未激活,则 LED 灯始终显示为灰色。
8• 绿色:该学习模式已激活。 • 灰色:该学习模式未激活。 如果碰撞识别未激活,则 LED 灯始终显示为灰色。
9切换至 碰撞识别 - 数据组视图 窗口。
10切换至 碰撞识别 - 数据组学习视图 窗口。
行指令 SaveMax
出于兼容性原因,KSS 中仍有行指令 SaveMax:所以,包含 SaveMax 的早期KSS 版本的程序仍可继续使用。
针对新程序,强烈建议不要通过 SaveMax 填充数据组,而是通过学习模式或通过窗口 碰撞识别 - 数据组配置!
SaveMax 主要可能导致显示错误,尤其是在碰撞识别 - 视图窗口中。
调用
1. 指令》移动参数》 碰撞识别
2. 在行指令中选择条目 SaveMax。

行指令 SetDefault, SetLimits
出于兼容性原因,KSS 中仍有行指令 SetDefault 或 SetLimits:所以, 包括这些行指令的早期 KSS 版本的程序仍可继续使用。
针对新程序,强烈推荐使用行指令 UseDataSet!
SetDefault和 SetLimits 主要可能导致显示错误,尤其是在碰撞识别 - 视图窗口中。
调用
•指令》移动参数》 碰撞识别
•在行指令中选择条目 SetDefault或 SetLimits。
行指令 SetDefault
将 $custom.dat 中的默认值用于碰撞识别。

行指令 SetLimits
为每个轴指定所需的碰撞识别灵敏度。默认:50 %

审核编辑 :李倩
-
控制器
+关注
关注
112文章
16396浏览量
178482 -
机器人
+关注
关注
211文章
28494浏览量
207448
原文标题:KUKA : 接通运动的碰撞识别
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
射频识别系统中的防碰撞算法设计
水银开关式碰撞传感器的识别
滚轴式碰撞传感器的识别
偏心锤式碰撞传感器的识别
滚球式碰撞传感器的识别
KUKA库卡机器人伺服驱动器相关型号举例
CAD中怎么进行碰撞检测?CAD碰撞检测教程
基于多比特识别的射频识别防碰撞算法
基于多比特识别的射频识别标签防碰撞算法
多维编码逐维识别RFID防碰撞算法
人脸识别碰撞智慧机场 新科技不断擦出火花
一文详解KUKA机器人的碰撞识别

KUKA的碰撞识别(KSS版)






 工商网监
工商网监
评论