 Free RTOS的优先级翻转
Free RTOS的优先级翻转
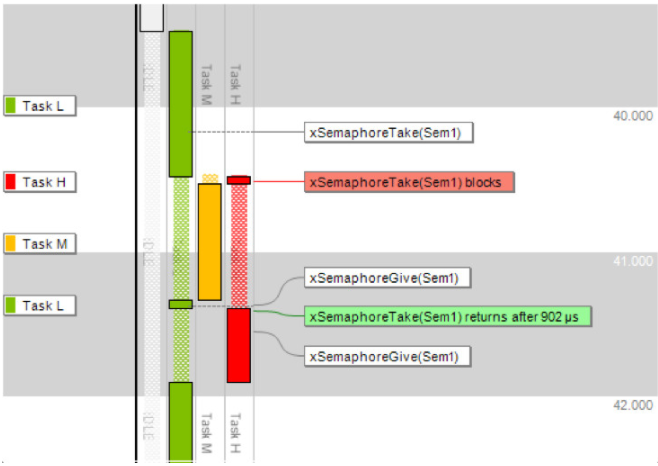
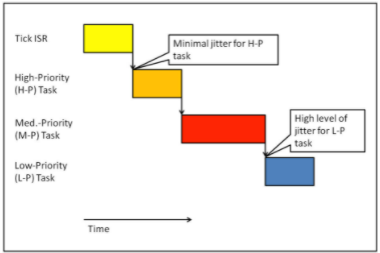
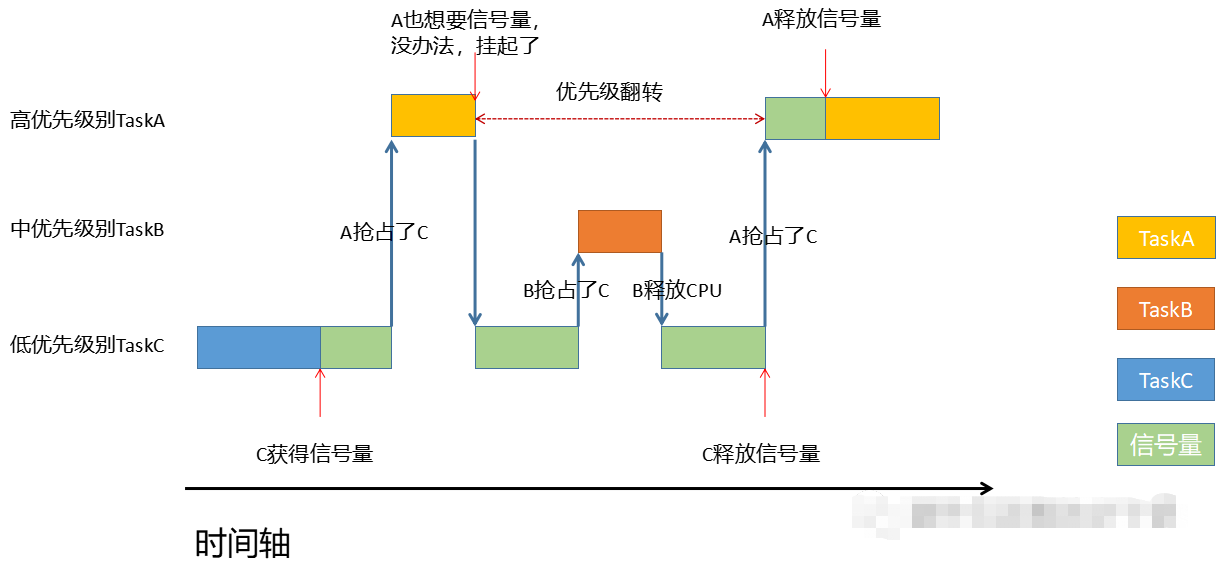
优先级翻转简介:就是高优先级的任务运行起来的效果好像成了低优先级,而低优先级比高优先级先运行;
举个栗子:假如有三个高、中、低优先级不同的任务,中优先级任务正常跑,假如高、低优先级任务它们两个都在等待同一个二值信号量,但是较低优先级的那个任务有点特别,就是它在获取到信号量后有很长一段很长的延迟(如delay_100s),再释放信号量,因为较低优先级任务没有释放信号量,这就导致高优先级的任务在这段时间是在死等,正常都是高优先级的任务会抢占低优先级任务,而这个刚好违背了常理导致出现优先级翻转;如何解决这个问题呢,请看下一篇推文!
用个小实验看看具体效果
#include "stm32f10x.h"
#include
#include "FreeRTOS.h"
#include "task.h"
#include "semphr.h"
//毫秒级的延时
void Delay_Ms(u16 time)
{
u16 i=0;
while(time--)
{
i=12000; //自己定义
while(i--) ;
}
}
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE); //开启时钟
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0; //选择你要设置的IO口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; //设置推挽输出模式
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //设置传输速率
GPIO_Init(GPIOC,&GPIO_InitStructure); //初始化GPIO
GPIO_SetBits(GPIOC,GPIO_Pin_0); //将LED端口拉高,熄灭LED
}
void KEY_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOE,ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0; //选择你要设置的IO口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPD;//下拉输入
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //设置传输速率
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化GPIO */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3|GPIO_Pin_2|GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU; //上拉输入
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOE,&GPIO_InitStructure);
}
void USART_init(uint32_t bound)
{
GPIO_InitTypeDef GPIO_InitStruct; //定义GPIO结构体变量
USART_InitTypeDef USART_InitStruct; //定义串口结构体变量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_USART1,ENABLE); //使能GPIOC的时钟
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9; //配置TX引脚
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; //配置PA9为复用推挽输出
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; //配置PA9速率
GPIO_Init(GPIOA,&GPIO_InitStruct); //GPIO初始化函数
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_10; //配置RX引脚
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING; //配置PA10为浮空输入
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; //配置PA10速率
GPIO_Init(GPIOA,&GPIO_InitStruct); //GPIO初始化函数
USART_InitStruct.USART_Mode=USART_Mode_Tx|USART_Mode_Rx; //发送接收模式
USART_InitStruct.USART_Parity=USART_Parity_No; //无奇偶校验
USART_InitStruct.USART_BaudRate=bound; //波特率
USART_InitStruct.USART_StopBits=USART_StopBits_1; //停止位1位
USART_InitStruct.USART_WordLength=USART_WordLength_8b; //字长8位
USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //无硬件数据流控制
USART_Init(USART1,&USART_InitStruct); //串口初始化函数
USART_Cmd(USART1,ENABLE); //使能USART1
}
int fputc(int ch,FILE *f) //printf重定向函数
{
USART_SendData(USART1,(uint8_t)ch); //发送一字节数据
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET); //等待发送完成
return ch;
}
#define START_TASK_PRIO 5 //任务优先级
#define START_STK_SIZE 128 //任务堆栈大小
TaskHandle_t StartTask_Handler; //任务句柄
void Start_Task(void *pvParameters);//任务函数
#define Low_TASK_PRIO 2 //任务优先级
#define Low_STK_SIZE 50 //任务堆栈大小
TaskHandle_t LowTask_Handler; //任务句柄
void Low_Task(void *p_arg); //任务函数
#define Med_TASK_PRIO 3 //任务优先级
#define Med_STK_SIZE 50 //任务堆栈大小
TaskHandle_t MedTask_Handler; //任务句柄
void Med_Task(void *p_arg); //任务函数
#define High_TASK_PRIO 4 //任务优先级
#define High_STK_SIZE 50 //任务堆栈大小
TaskHandle_t HighTask_Handler; //任务句柄
void High_Task(void *p_arg); //任务函数
SemaphoreHandle_t Binary_Handle =NULL; //二值信号量句柄
int main( void )
{
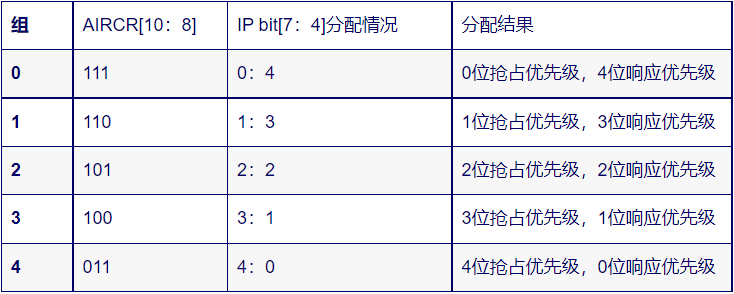
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组 4
LED_Init(); //初始化 LED
KEY_Init();
USART_init(9600);
//创建开始任务
xTaskCreate(
(TaskFunction_t )Start_Task, //任务函数
(const char* )"Start_Task", //任务名称
(uint16_t )START_STK_SIZE, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )START_TASK_PRIO, //任务优先级
(TaskHandle_t* )&StartTask_Handler //任务句柄
);
vTaskStartScheduler(); //开启调度
}
//开始任务函数
void Start_Task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区
/* 创建Test_Queue */
Binary_Handle = xSemaphoreCreateBinary();
if(Binary_Handle != NULL)
{
xSemaphoreGive(Binary_Handle);//释放信号量
}
//创建 Low 任务
xTaskCreate(
(TaskFunction_t )Low_Task,
(const char* )"Low_Task",
(uint16_t )Low_STK_SIZE,
(void* )NULL,
(UBaseType_t )Low_TASK_PRIO,
(TaskHandle_t* )&LowTask_Handler
);
//创建 Med 任务
xTaskCreate(
(TaskFunction_t )Med_Task,
(const char* )"Med_Task",
(uint16_t )Med_STK_SIZE,
(void* )NULL,
(UBaseType_t )Med_TASK_PRIO,
(TaskHandle_t* )&MedTask_Handler
);
//创建 High 任务
xTaskCreate(
(TaskFunction_t )High_Task,
(const char* )"High_Task",
(uint16_t )High_STK_SIZE,
(void* )NULL,
(UBaseType_t )High_TASK_PRIO,
(TaskHandle_t* )&HighTask_Handler
);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
void Low_Task(void *pvParameters)
{
int count = 0;
while(1)
{
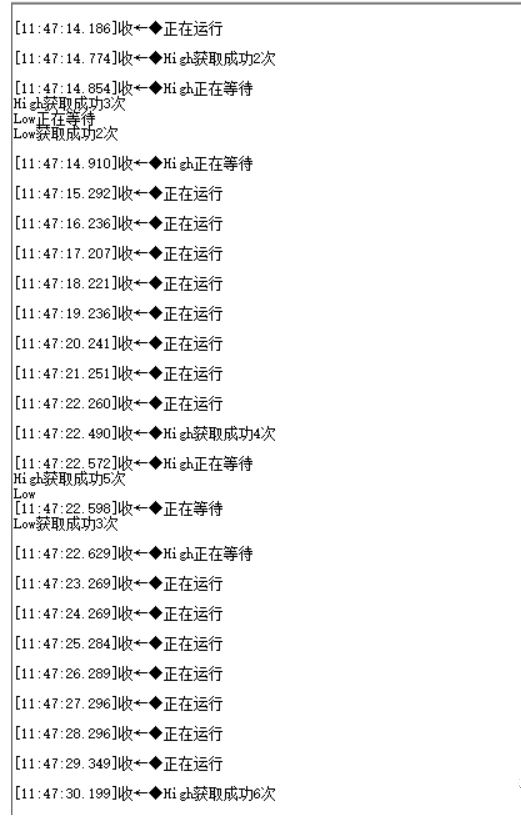
printf("Low正在等待n");
xSemaphoreTake(Binary_Handle,portMAX_DELAY);
printf("Low获取成功%d次n",++count);
Delay_Ms(5000);
xSemaphoreGive(Binary_Handle);//释放信号量
vTaskDelay(50);
}
}
void Med_Task(void *pvParameters)
{
//BaseType_t xReturn = NULL;
while(1)
{
printf("正在运行n");
vTaskDelay(1000);
}
}
void High_Task(void *pvParameters)
{
int count = 0;
while(1)
{
printf("High正在等待n");
xSemaphoreTake(Binary_Handle,portMAX_DELAY);
printf("High获取成功%d次n",++count);
xSemaphoreGive(Binary_Handle);//释放信号量
vTaskDelay(50);
}
}
实验效果
--END--
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
FreeRTOS
+关注
关注
12文章
484浏览量
62139 -
任务
+关注
关注
1文章
20浏览量
8535
发布评论请先 登录
相关推荐
RTOS应用中的优先级反转问题
在嵌入式系统中,如果使用基于优先级调度算法的RTOS,系统中可能发生优先级反转现象。优先级反转用来描述系统中高优先级任务由于等待低
发表于 12-14 11:00
•1202次阅读
UCOS优先级翻转知多少?
对于新手来说,优先级翻转看起来有点点困难?其实,你可能缺少一个有趣的故事故事主人公:LPT(Low PrioTask),MPT(Middle PrioTask),HPT(High PrioTask
发表于 04-24 03:25
干货 | RTOS应用中的优先级反转问题
在嵌入式系统中,如果使用基于优先级调度算法的RTOS,系统中可能发生优先级反转现象。优先级反转用来描述系统中高优先级任务由于等待低
发表于 03-09 15:00
如何正确设置中断优先级
优先级范围从0x00~0xFF), 是绝大多数微控制器制造商只是使用其中的一部分优先级NXP 1062 使用了其中的高4bits,所以中断优先级在0-15,共16个在Cortex-M内核中,一个中断的
发表于 12-16 07:08
uC/OS-II中优先级翻转问题
本文着重分析优先级翻转问题的产生和影响,以及在uC/OS-II中的解决方案,在嵌入式系统的应用中,实时性是一个重要的指标,而优先级翻转是影响系统实时性的重要问题
发表于 01-06 16:53
•2378次阅读

2.FreeRTOS中断优先级和任务优先级
FreeRTOS中断优先级和任务优先级架构:Cortex-M3版本:FreeRTOS V9.0.0前言:最开始,我并没有搞清楚什么是中断优先级和任务优先级,但看了部分资料后发现这两个并
发表于 12-04 20:21
•9次下载

STM32F103芯片中断优先级以及FreeRTOS优先级设置
STM32F103只用了4个位来表达优先级,因此最多支持16级的可编程优先级(0~15),15为最低优先级。
发表于 01-25 18:59
•1次下载
具有固定优先级调度程序RTOS的优先级倒置
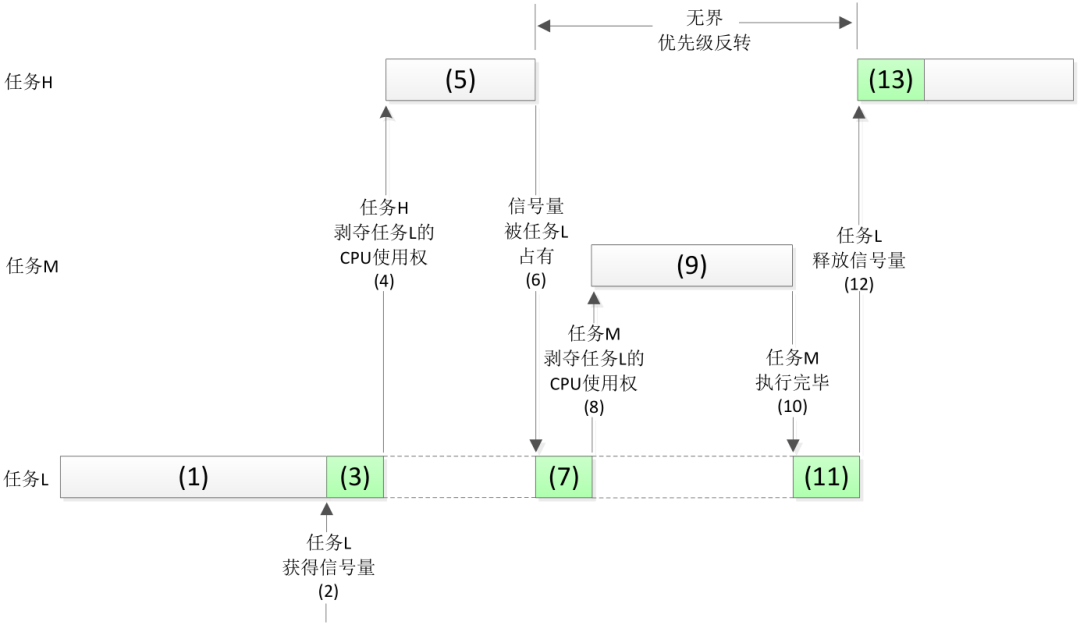
优先级继承并不能真正治愈优先级倒置,它只是在某些情况下将其影响最小化。硬实时应用程序仍应仔细设计,以便一开始就不会发生优先级反转。
什么是优先级反转
假设现在有三个任务TaskA(优先级高)、TaskB(优先级中)、TaskC(优先级低),一个信号量(Semaphore),此信号量用于任务之间争夺某个资源。在某一时刻,高优先级的Ta
I2C子系统优先级翻转与优先级继承
优先级翻转与优先级继承 优先级翻转在可剥夺内核中是非常常见的,例子如下(H:High、M:Middle、L:Low) 任务 H 和任务 M





 工商网监
工商网监
评论