 机器人技术与系统国家重点实验室刘英想教授团队在压电机械手研究方面取得新进展
机器人技术与系统国家重点实验室刘英想教授团队在压电机械手研究方面取得新进展
近日,机器人技术与系统国家重点实验室刘英想教授团队在压电机械手研究方面取得新进展,开发出由压电陶瓷驱动的新型4指压电机械手,相关成果以《面向宏微跨尺度操控的压电机械手》(Piezo robotic hand for motion manipulation from micro to macro)为题发表在《自然通讯》(NatureCommunications)上。压电机械手独特的宏微运动操控能力有望解决诸多先进技术领域面临的跨尺度精细操控难题。
机械手可代替或辅助人手实现灵巧操控,在机器人辅助操控领域有着举足轻重的地位,其功能与性能直接影响系统的服务水平。现有机械手种类繁多,在结构特征、换能原理和传动方式方面不尽相同,由于换能原理和运动传递策略的限制,其在动作精度、电磁兼容性和结构紧凑性等方面存在诸多局限。如何寻找新换能原理的驱动模式,设计更高效、更精密的传动机构,甚至完全摒弃传动机构,成为研制机械手的新焦点和新挑战。
该项研究工作开发出运用压电陶瓷构造的4指机械手。该机械手采用4指阵列均布构型,其手指为4分区环形压电陶瓷集成一体化结构,凭借逆压电效应实现电能至机械能转换,从而将压电陶瓷的多维微观变形转换为手指的多维运动。
团队运用4指协同操控思想规划了10余种典型功能化操控手势,借助动静摩擦交替操控方法实现平板型、圆柱型、球型等物体的多维跨尺度操控;详细研究了压电机械手的迟滞(《3.95%)、分辨力(15纳米)、响应时间(0.5毫秒)、固有频率(4.1千赫兹)等特性,以及操控平板物体的运动特性;通过实验验证了压电机械手对各类物体的高适应性、多自由度、跨尺度操控能力。一系列应用探索试验成功展示了压电机械手在构建多自由度操控设备和集成机械臂末端执行器等方面的应用潜力。该项工作以无传动高刚性功能陶瓷集成一体化构型为核心,展示了运用压电陶瓷微观变形实现宏微跨尺度运动操控的可行性,相关多维运动生成方法和功能手势协同操控思想为机械手研制提供了新思路。
我校为论文唯一通讯单位。机电学院博士研究生张仕静、刘英想教授、邓杰副教授为论文共同第一作者。刘英想教授为论文唯一通讯作者。机电学院博士研究生高祥、李京、王玮亦、荀铭鑫、马雪峰、常庆兵,机电学院刘军考教授、陈维山教授、赵杰教授为论文共同作者。
该研究获得国家自然科学基金、哈工大医工理交叉基金的资助。此外,该4指压电机械手曾获第四届中国研究生机器人创新设计大赛特等奖。
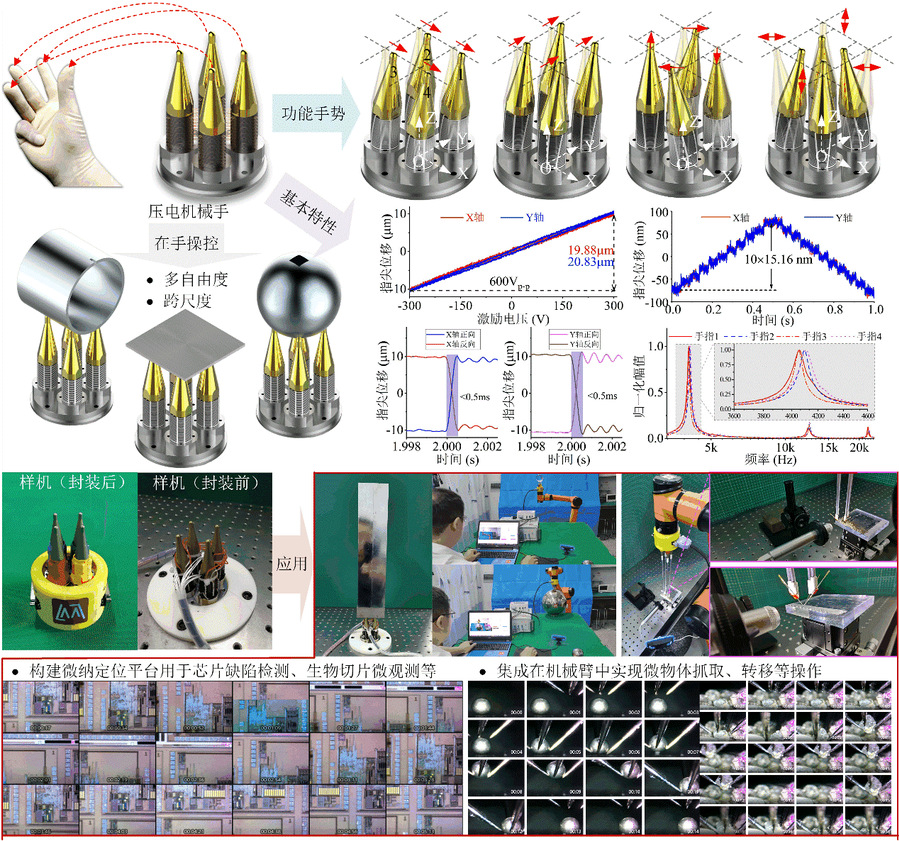
压电机械手的结构、手势、特性、样机与应用示意图
论文链接:
https://www.nature.com/articles/s41467-023-36243-3
审核编辑 :李倩
-
电磁兼容性
+关注
关注
6文章
425浏览量
33706 -
机器人技术
+关注
关注
18文章
193浏览量
31631
原文标题:机器人技术与系统国家重点实验室刘英想教授团队在压电机械手研究方面取得新进展
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
开启全新AI时代 智能嵌入式系统快速发展——“第六届国产嵌入式操作系统技术与产业发展论坛”圆满结束
封装天线技术的发展动向与新进展
设计一种可用于大学和学校教授机器人技术的机器人
有机场效应晶体管研究取得重要进展

中科院半导体研究所在柔性人工视觉感知和存储系统领域中取得新进展
红外物理国家重点实验室在非平衡电子态操控领域取得突破






 工商网监
工商网监
评论