 基于AUTOSAR规范的操作系统知识
基于AUTOSAR规范的操作系统知识
汽车电子控制器中目前基本遵循AUTOSAR规范,而其中操作系统作为BSW的重头戏,始终让学习AUTOSAR的同学望而生畏,进而望而却步。所以,今天整理下基于AUTOSAR规范的操作系统知识,方便大家学习,以供参考。
0 为什么需要OS?
现在嵌入式系统纷繁复杂,这点毋庸置疑,但是为什么需要操作系统呢?有没有仔细思考过。其实在早期的嵌入式系统中,是没有操作系统概念的。相信做嵌入式开发的同学都能理解,在main()函数中,写个while循环,再加个定时器,按照分时间片的方式,定时执行代码,就可以完成简单的调度。
但是,现在不一样了,系统越来越复杂了,以前那种简单粗暴的调度已经无法满足要求。说到系统复杂,主要原因有如下几点:
- 任务多样化;
- 周期复杂化;
- 分层调用嵌套;
- 多核系统引入;
举个例子。比如,我们有个三核系统,其中core0负责应用功能ASW,core1负责基础功能BSW,core2负责系统监控、功能安全和诊断等。如何在功能运行时,满足其正常任务的调度,同时系统代码指令和监控等也同步呢?在main()函数里,我们通过循环语句加定时器再试试看,估计要“难于上青天”了吧。
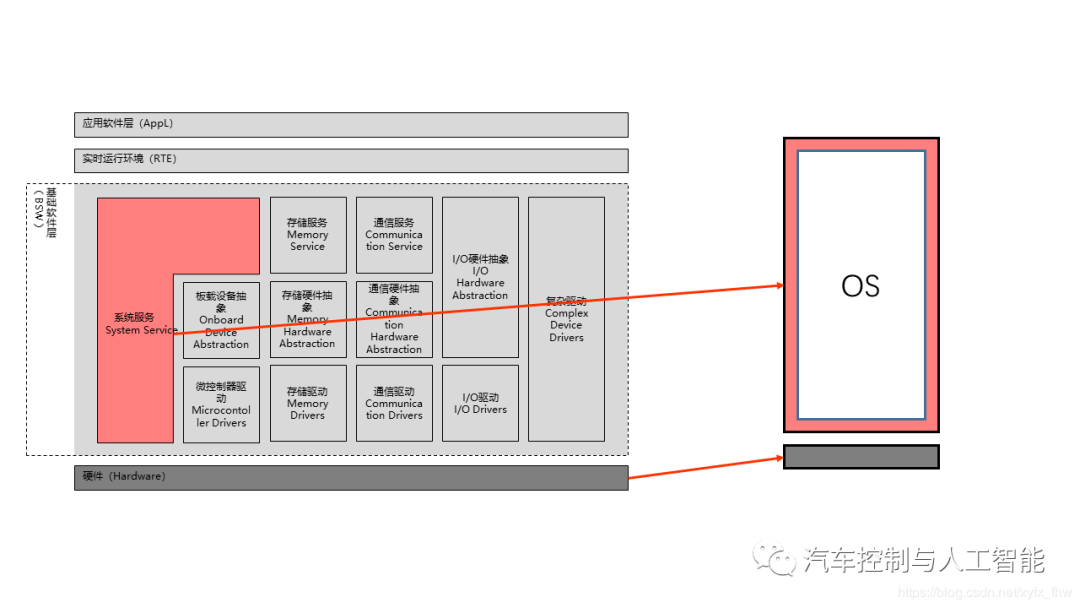
所以,就需要一个叫做操作系统的东西出现。它管理任务和事件的调度、不同任务之间的数据流,并提供监视和错误处理功能。操作系统为实时应用提供所有基本服务,包括中断处理、调度、系统时间和时钟同步、本地消息处理,以及错误检测机制。
1 AUTOSAR OS特点
操作系统可以根据它们的特征被分成不同的组,比如静态配置和动态管理。要对AUTOSAR操作系统(下文简称AUTOSAR OS)进行分类,以下是其基本特征:
- 静态配置
- 推断系统的实时性能
- 提供基于优先级的调度策略
- 运行时提供保护功能(内存、定时等)
- 无需外部资源,可嵌入低端控制器
所以,Autosar OS 和常见的OS(如linux系统OS)具有以下的区别:
- 在运行时不会动态创建新任务;
- 属于预编译配置变体,必须在编译之前定义所有任务;
- 操作系统没有动态内存管理,也没有用于手动控制任务的shell。
在AUTOSAR OS提出之前,在汽车电子领域其操作系统已经经历了两个阶段,即non-OSEK OS和OSEK OS。
当然,现在处于的第三个阶段Autosar OS,是与OSEK兼容的操作系统,但是具有多个扩展性能。例如可扩展功能:调度表,OS applications,内存保护和时序保护。OSEK OS 特别提供了以下特性支持AUTOSAR:
- 基于优先级调度
- 处理中断的功能
- 中断高于任务的优先级
- 防止错误使用OS 服务的保护措施
- StartOS和StartupHook 启动接口
- ShutdownOS和ShutdownHook 关闭接口
具体的OS的可扩展级别分四级:
| SC1 | OSEK OS +计划时间表 |
|---|---|
| SC2 | SC1 +时序保护 |
| SC3 | SC1 +内存保护 |
| SC4 | SC1+SC2+SC3 |
2 AUTOSAR OS的对象
Autosar OS提供基于优先级的调度策略,具有可抢占属性和同步的机制,通过事件和资源的属性来实现。AutosarOS提供以下对象进行多任务执行的管理,如 Alarms,Applications,Application modes,Counters,Events,ISRs,Register Sets,Resources,Schedule tables,Spinlocks,Tasks。 这些对象及其配置是AUTOSAR OS的重点内容,后续我们会分别详细解释,这里简单介绍。
Alarms :警报器,就像我们的上课铃声,到时间就会响。操作系统用它来做一些定时的事,比如激活一个任务Task。
Applications :从字面意思理解,它是一个应用,准确地说,它应该是一个分区。它部署到某个Core上,主要的作用就是管理放到其中的对象。为什么要这个东西呢?举个不恰当的例子。MCU像一个国家,核就是它的省,那么Applications就可以理解成省管辖下的地级市。比如,某一天一个地级市里发现了大量新冠病毒感染者,为了防止扩散,将该市封闭处理,以免扩张到其他市区。想想看,当这个市里出现疫情时,是封闭整个省好呢,还是仅封闭该市好呢?显然是后者。芯片里的划区也是非常合理的。AUTOSAR OS 分区分为可信的和非可信的。
Application modes :用的极少,这里不展开介绍;
Counters :把Counter比作心脏比较合适,对于芯片来说,它就是晶振。在操作系统它的作用就是计时或者计数,一般Counter与芯片的Timer结合起来,Counter的精度决定了操作系统能计时的准确度。
Events: 事件。在嵌入式操作系统中,事件一般是和任务绑定一起来实现调度功能的,当然也可以由Alarms来触发。比如,我通过设定某个任务在10ms进程执行,10ms的任务就和该事件一起来实现。
ISRs: interrupt service routine,就是我们讲的中断。中断的概念对于嵌入式开发的同学而言,应该都比较熟悉。在AUTOSAR OS中中断有两种类型,Autosar OS中将中断分为Cat1 和Cat2,即所谓的1类中断和2类中断,所谓的2类中断其实就是完全被OS接管的中断,这类中断的上下文切换,堆栈管理全部由OS管理;而1类中断则不被OS接管,因此它的上下文由自己管理。另外Autosar Os中要求Cat1的中断的最低优先级高于Cat2的最高优先级,也就是说Cat1的中断优先级更高。所以Cat1的中断一般用于时间要求更紧急的场合。要知道,中断有比任何任务都高的优先级,即中断可以抢占任务。
Register Sets: 几乎没有使用,暂时不介绍。
**Resources:**资源。嵌入式系统内部的资源是用来强制任务分组运行的,在分组内部,是没有抢占一说的,即共享资源。当然,中断就不能使用内部分组资源了。共享什么资源呢?比如栈的共用,为了降低系统的负荷,我们可以让同分组的任务共用分配的栈资源,你用完我用,像和谐社会一般。
**Schedule tables:**调度表,可以将其理解为包含了很多调度点的表,Autosar Os中一般这么用调度表,比如有 1ms,2ms,5ms 三个周期需要调度的任务,那么会根据公约数,生成一个表,这个表在1ms 处调度1ms任务,2ms处调度1ms和2ms任务,4ms处调度1ms和2ms任务,5ms处调度1ms和5ms任务,10ms处调度1ms,2ms,5ms任务,然后按照这样的关系循环,这就是所谓的调度表。目前有部分主流的Autosar开发商使用这种方式进行任务的调度。当然,Schedule Table有自己的状态机,Schedule Table调度方式最大的好处在于保持调度的同步性。
Spinlocks: 没有项目使用,暂不介绍。
**Tasks:**任务应该也比较熟悉,Autosar Os有些自己的性质,简单介绍下。
Task 类型:
所谓的扩展task,就是多了一个Waiting状态,因此它一般就是等待一个Event的到来。
此外Task的调度分为抢占式和协作式,对于可抢占的Task,OS会根据Task的优先级进行排序调度,优先级高的可以抢占优先级低的。在AUTOSAT OS中数字越大优先级越高。
当然,操作系统还有内存保护,时序保护和错误机制等内容,今天概览性地介绍这些,后续有机会再分别详细阐述。
-
控制器
+关注
关注
113文章
16543浏览量
180179 -
汽车电子
+关注
关注
3029文章
8059浏览量
168223 -
AUTOSAR
+关注
关注
10文章
365浏览量
21903 -
BSW
+关注
关注
0文章
15浏览量
3539
发布评论请先 登录
相关推荐
实时操作系统和分时操作系统的区别
如何开发符合AUTOSAR规范的电机控制器软件
嵌入式操作系统FreeRTOS的相关资料分享
介绍一种适配RT-Thread内核的autosar操作系统
操作系统教程_孙钟秀

操作系统原理_孙钟秀
全球及我国汽车操作系统发展现状分析
关于操作系统知识详细解读

汽车操作系统和中间件的关系

AUTOSAR OS操作系统功能特性
普华车用操作系统与黑芝麻智能武当C1200家族芯片完成适配






 工商网监
工商网监
评论