 怎样通过PLC来控制伺服系统
怎样通过PLC来控制伺服系统
“伺服”—词源于希腊语“奴隶”的意思。人们想把“伺服机构”当个得心应手的驯服工具,服从控制信号的要求而动作:在讯号来到之前,转子静止不动;讯号来到之后,转子立即转动;当讯号消失,转子能即时自行停转。由于它的“伺服”性能,因此而得名——伺服系统。
下面,让我们来看一下怎样通过PLC来控制伺服系统吧。
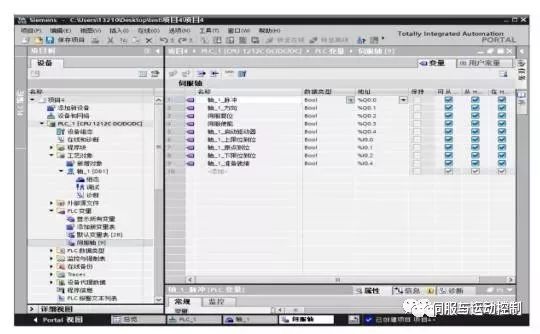
1. 变量添加
在PLC 变量新建一个变量表,用来存储伺服轴变量。
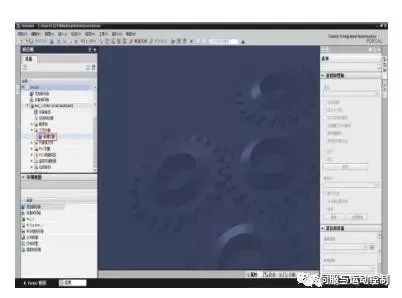
2 、工艺对象添加
在“工艺对象”目录下双击“新增对象”,选择运动控制中第一项定位轴。

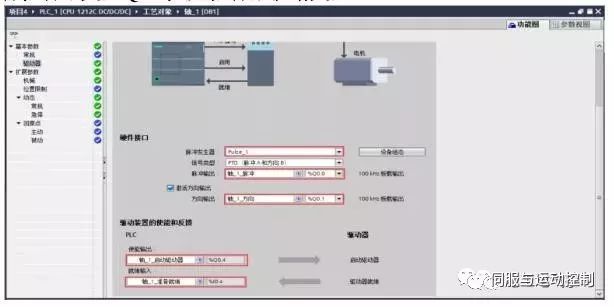
3、 基本参数
a. 驱动器:
添加脉冲发生器pulse_1 ,并关联脉冲输出变量Q0.0 、方向输出变量Q0.1 、启动驱动器变量Q0.3 以及驱动器就绪变量I0.4
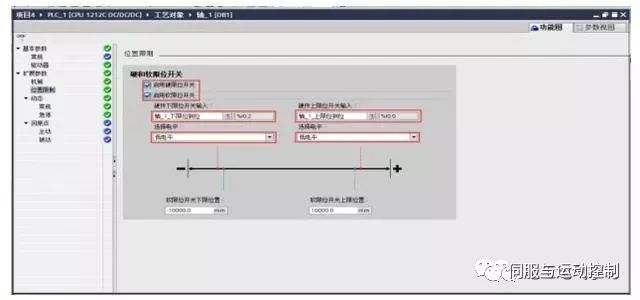
4 、 扩展参数
a. 机械:根据电机参数,设置电机每转的脉冲数、负载位移、旋转方向。

b. 位置限制:
启用软硬限位开关,(软限位可不勾选)并关联硬件上下限位开关输入,都选择低电平触发。
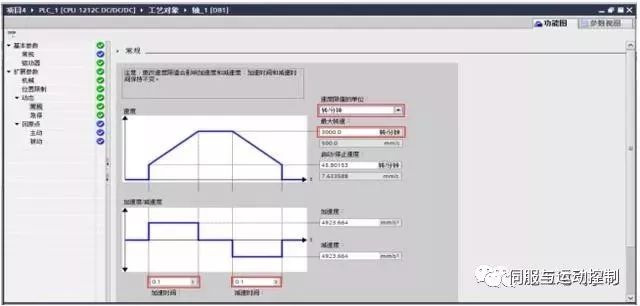
c. 动态- 常规:
根据编程习惯,选择速度限值单位(mm/s),设置最大转速(500mm/s),设置加速减速时间(0.1s)。
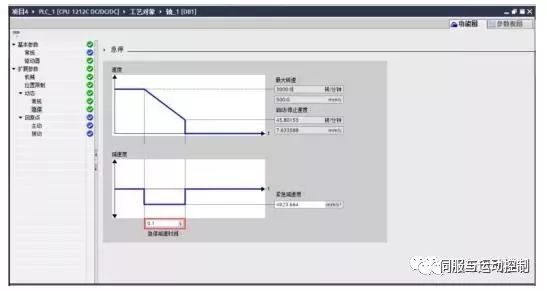
d. 动态- 急停
设置急停减速时间。
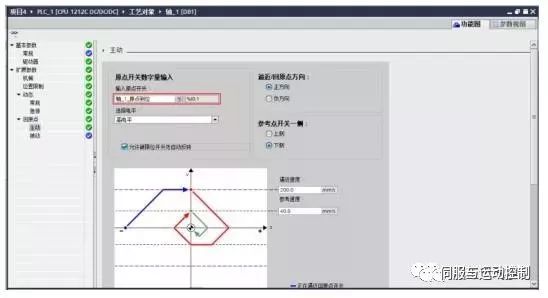
e. 回原点- 主动
关联输入原点开关信号,逼近原点方向选负方向,选择高电平触发。逼近速度20就好
5 、 运动控制指令
MC_Power 命令
MC_Reset 命令
MC_Home 命令 Mode = 3
MC_Halt 命令
MC_MoveAbsolute 命令
MC_MoveRelative 命令
MC_MoveVelocity 命令
MC_MoveJog 命令
以下为部分指令讲解:
a. MC_Power :启用、禁用轴
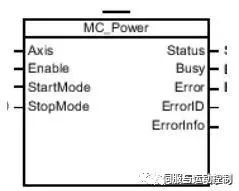
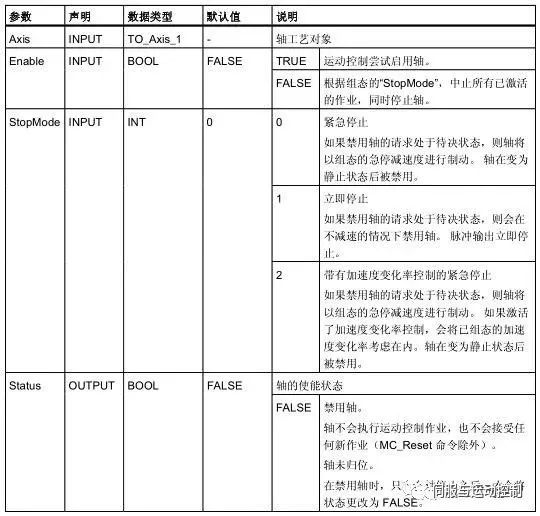

“MC_Power”运动控制指令可启用或禁用轴。
必须在定位轴工艺对象已正确组态。没有待决的启用/禁止错误。的前提下才能够运行。
运动控制命令无法中止“MC_Power”的执行。
禁用轴(输入参数“Enable”= FALSE)之后,将根据所选“StopMode”中止相关工艺对象的所有运动控制命令。
b. MC_Reset :确认故障,重新启动工艺对象

运动控制指令“MC_Reset”可用于确认“伴随轴停止出现的运行错误”和“组态错误”。
在 RUN 模式下完成下载后,可将轴组态下载到工作存储器。
任何其它运动控制命令均无法中止 MC_Reset 命令。
新的 MC_Reset 命令不会中止任何其它激活的运动控制命令。
c. MC_Home :使轴归位,设置参考点
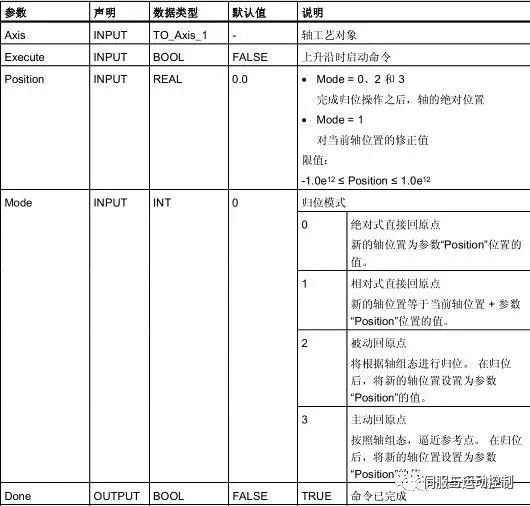
使用“MC_Home”运动控制指令可将轴坐标与实际物理驱动器位置匹配。轴的绝对定位需要回原点。可执行以下类型的回原点:
主动回原点(Mode = 3)自动执行回原点步骤。
被动回原点(Mode = 2)被动回原点期间,运动控制指令“MC_Home”不会执行任何回原点运动。用户需通过其它运动控制指令,执行这一步骤中所需的行进移动。检测到回原点开关时,轴即回原点。
直接绝对回原点(Mode = 0)将当前的轴位置设置为参数“Position”的值。
直接相对回原点(Mode = 1)将当前轴位置的偏移值设置为参数“Position”的值。
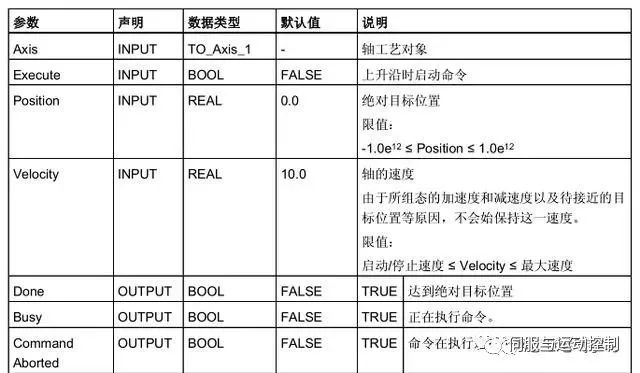
d. MC_Halt :停止轴
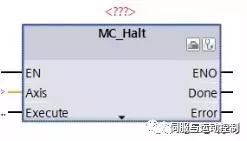

通过运动控制指令“MC_Halt”,可停止所有运动并以组态的减速度停止轴。未定义停止位置。
e. MC_MoveAbsolute :轴的绝对定位

运动控制指令“MC_MoveAbsolute”启动轴定位运动,以将轴移动到某个绝对位置。
要求轴已启用并已回原点。
f. MC_MoveJog :在点动模式下移动轴
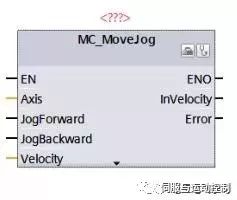
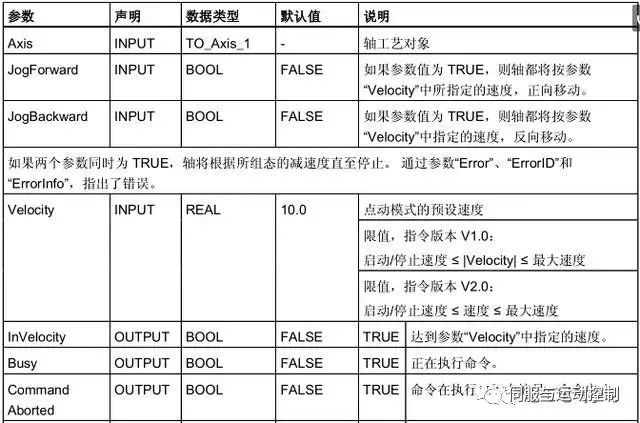
通过运动控制指令“MC_MoveJog”,在点动模式下以指定的速度连续移动轴。例如,可以使用该运动控制指令进行测试和调试。
-
plc
+关注
关注
5011文章
13286浏览量
463239 -
伺服系统
+关注
关注
14文章
572浏览量
39211
原文标题:西门子PLC如何控制伺服电机
文章出处:【微信号:旺材伺服与运动控制,微信公众号:旺材伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐







 工商网监
工商网监
评论