 变频错相控制方法中的时序管理设计与思考
变频错相控制方法中的时序管理设计与思考
前言:这是最近的一些只言片语的思考,一些零散不成体系的想法。后面如果有新的想法,再继续更新。本人能力有限,如有错误恳请帮忙指正,谢谢。
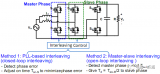
在比如LLC和CRM的两相交错控制中,我们需要同时变化频率又需要保证相位以设定角度工作。我们简单的以两相LLC交错90度的实现上来看,变化频率时,还需要保证角度正确,就需要事先知道频率变化后的周期长度,然后在去计算出滞后的时间,可见:
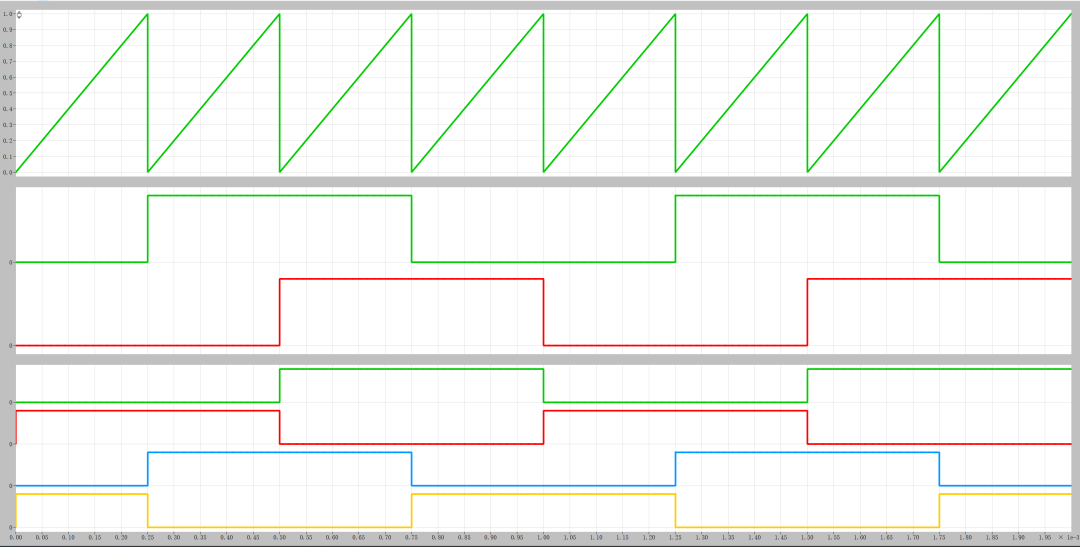
从上图来看,我们可以用时钟信号或者说是PWM RAMP的长度标志为开周期的25%,这样利用D触发器分频后,可以很容易得到滞后90°这个位置,然后用这个位置去开启B相,即可实现LLC的变频滞后90度的PWM输出。

在以这种方法的实现中,90度的位置基本上被固定,没用办法实现在滞后角度上的调整。同时PWM RAMP的频率x4后,在变化开关频率时,至少需要4个PWM RAMP才能稳定,理论上来说,动态时的频率和相位的误差会更大。
如果用两个PWM RAMP,使用PHASE A的90度时间点去启动PHASE B的计数。这样的动态响应应该会更好,这个方法也更容易在DSP中实现,可见:

使用两个PWM RAMP的0.5周期长度点做LLC的50%占空比点,用PHASE A的周期25%点做PHASE B的复位点,实现为:

其实LLC来说是要简单一些,因为作为频率控制变量可以事先在反馈中知道。CRM PFC中实现ZCD来做周期的复位信号时,就不同于LLC了。它无法使用事先的预知的周期终点来做相位管理,因为CRM的错相控制需要知道前一个开关周期长度,然后假设在相邻的两个周期的长度差异不大的情况,然后根据周期长度来计算出50%点的位置,再发出PHASE B的复位信号,可见:

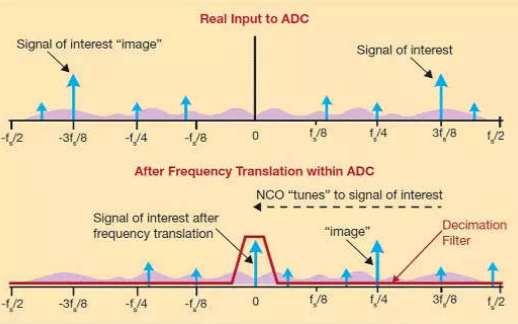
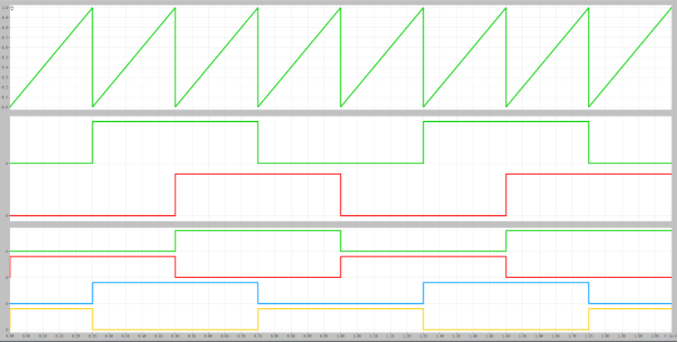
使用ZCD FLAG来做Trigger源来抓到PWM RAMP在ZCD信号进来时的幅值,然后使用高频LPF来过滤噪音后衰减0.5倍后,再比较后输出作为PHASE的时序同步信号。运行如图:

但是CRM控制中使用PHASE A 去同步PHASE B, 会因为交错CRM的电感器的偏差会存在进入CCM区域工作的问题 。为了解决进入CCM的工作模式,不可直接使用COPY PHASE A的周期来做,需用各个绕组的ZCD FLAG来做复位信号,但是这样又很难去同步相位。
下图是NCP1631的交错CRM的时序管理模块的示意图,下面简单的介绍一下ON的实现方法。更多的细节可以参见NCP1631的规格书哈。
当PHASE A的OFF时间增大后,必须要等到ZCD出现后才能开启新的PWM周期,这样做可以避免因为负载扰动时可能进入CCM的问题。当PHASE A的OFF时间增大时,PWM RAMP的A阶段会更多时间的放电(下降沿), 使PWM RAMP的下降到更低的电平 。因此当ZCD A FLAG重置PWM RAMP的计数方向时,当然也开启了新的PWM周期。那么PWM RAMP需要从新的低端电压(计数值)开始上升,那么显然上升到复位电压点B阶段的时间也会同步变长。PWM RAMP达到上升沿峰值后开始下降(C阶段)。 同时事先设置好使用PWM RAMP下降沿作为PHASE A和B的切换选择, 就是A阶段是控制PHASE A,C阶段控制PHASE B。 在C阶段时需等待PHASE B的ZCD FLAG出现,然后PHASE B的PWM 开启。PWM RAMP转为D阶段开始上升沿充电,然后达到峰值后转为下降沿的E阶段,等待PHASE A的ZCD FLAG。因此,PHASE B的周期长度也影响了C阶段PWM RAMP下降沿的低端峰值,从而也影响到了PHASE A周期开通点,要让PHASE A的PWM开启,必须也要经历D和E这个过程。

因此通过上述的方法,可以把PWM OFF的扰动重新影响到另外一个PHASE的PWM开启点上,强迫另一个周期的OFF时间也必须延长,以此来避免进入CCM的情况。虽然相位可能会偏离180度,但是可以保证不会进入CCM。
-
频率
+关注
关注
4文章
1497浏览量
59222 -
CRM
+关注
关注
1文章
145浏览量
21122 -
LLC
+关注
关注
36文章
567浏览量
76779
发布评论请先 登录
相关推荐
如何有效的管理FPGA设计中的时序问题
汽车线束设计中连接器的防错方法
变频错相控制方法中时序管理是怎样的设计与思考?







 工商网监
工商网监
评论