 煤矿巡检机器人—提高人工巡检的灵活性
煤矿巡检机器人—提高人工巡检的灵活性
矿山存在环境复杂、空间狭小和绝大部分是易燃、易爆、有毒、有腐蚀的危险品等环境因素。目前矿山的巡视和检修工作大部分都由人工完成,而矿山巡检机器人出现,它可以用于替代人工进行安全检查、监测以及采集矿山中的信息等操作,使得矿山巡检更加先进、安全地进行矿山巡检。

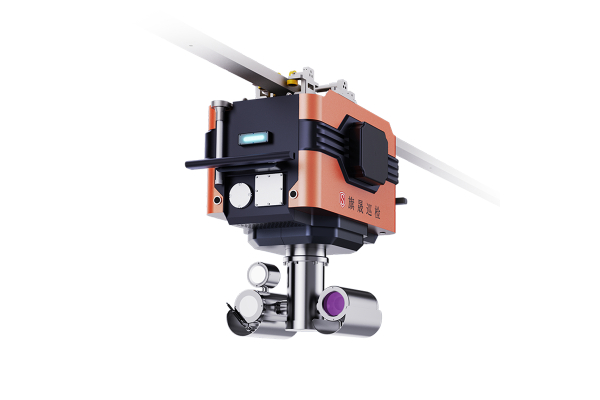
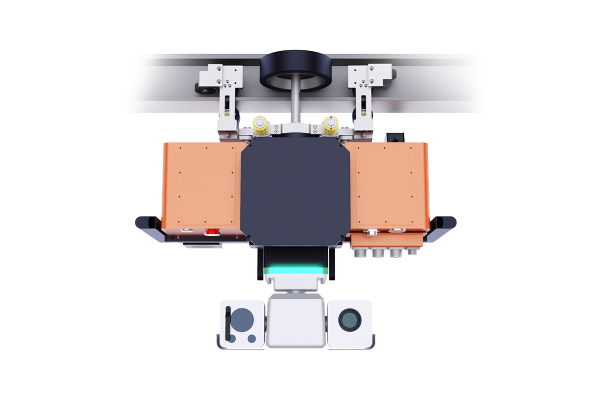
矿山巡检机器人目前主流的形式分为两种,分别是轨道式巡检机器人和轮式巡检机器人,轨道式巡检机器人主要是为狭长的线性场景打造的,诸如煤矿巷道、电厂输煤皮带巡检。替代工人来对皮带机的滚筒、托辊经常岀现损坏,输送带突发纵撕、坑道积水等巡检。
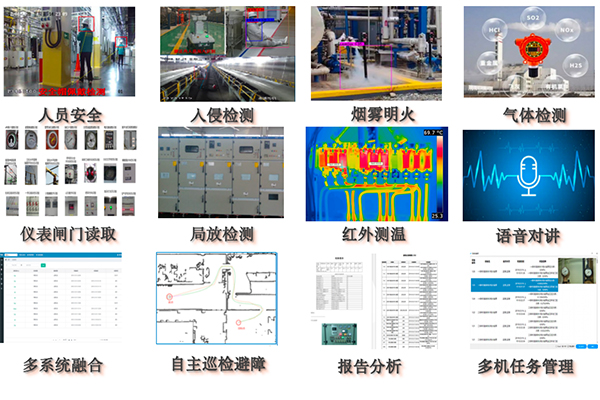
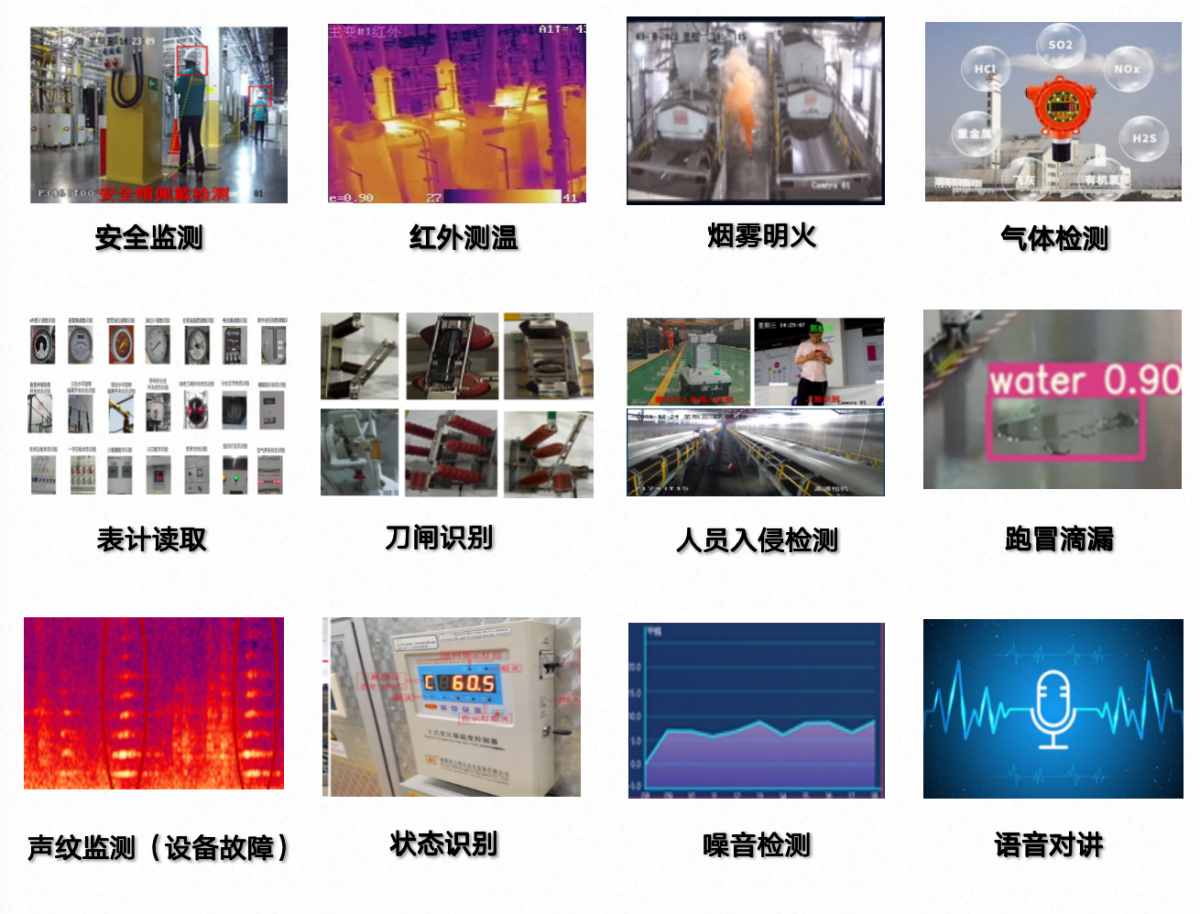
轮式巡检机器人主要应用于路面情况比较好的区域性场景,比如说在矿山的一些配电室上巡检。比如说如局部放电检测、红外温度检测、红外热成像等。对站内设备和环境进行全方位、全天候的监控,若发现数据有异常,实时报警提醒。
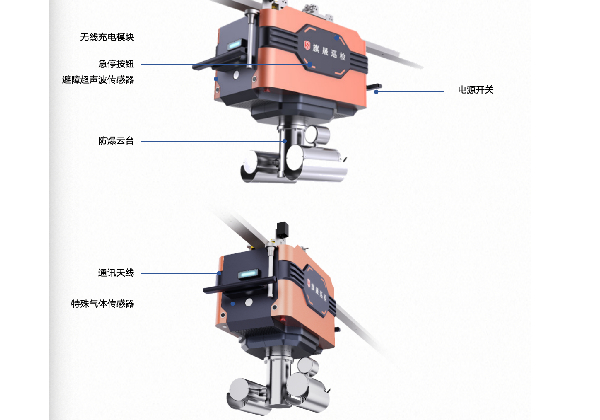
不论是轮式还是挂轨式的巡检机器人采用耐腐蚀表面涂装材料,耐腐蚀轮胎轮毂设计。确保能够在高温、高辐射环境下不受损害、保持本来面目。具备自主巡航、漏液检测、温湿度检测、有毒气体检测、自动充电等多项功能。采集到的数据可实时反馈到智能运维平台,将识别出的数据还可以传输到后台,后台做数据分析,帮助工作人员进行更加科学的分析数据,排查隐患。
总而言之,煤矿巡检机器人不仅具有人工巡检的灵活性和智能性,而且弥补了人工巡检的一些缺陷和不足。使得巡检方式简便化,巡检范围扩大化,极大提升了巡检工作的准确性和时效性。
审核编辑黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28414浏览量
207055 -
检测
+关注
关注
5文章
4487浏览量
91465
发布评论请先 登录
相关推荐
无人机自动巡检系统的巡检流程与人工巡检效率对比
公众智能监测推出了无人机自动巡检系统来自动巡检山地光伏电站,该系统利用无人机的灵活性和记载多模态传感器的高效感知能力,实现对山地光伏板的快速准确巡检,大大

Ex2-C6防爆挂轨巡检机器人:化工安全巡检的得力助手
出错,管理难度大。而化工厂巡检机器人的出现,为解决这些问题带来了希望。让我们一同探索化工厂巡检机器人如何为化工企业安全生产保驾护航。 一、化工巡检

挂轨巡检机器人在发电厂与煤矿皮带机场景的应用
科技有限公司推出的B3-111-A挂轨巡检机器人,以其高效、精准、安全的特性,为发电厂和煤矿的皮带机巡检带来了革命性的变革。 二、B3-111-A 挂轨

巡检机器人有哪些功能和应用场景
随着科技的飞速发展,巡检机器人作为智能化、自动化的重要代表,已经在多个领域展现出其独特的优势。从工业生产到特殊环境监测,巡检机器人以其高效、准确和安全的特性,逐渐取代了传统的

巡检机器人的分类和种类有哪些
在科技日新月异的今天,巡检机器人已经成为自动化巡检领域的得力助手,它们凭借着高效、精准和全天候的工作能力,逐渐在各个领域崭露头角。从轨道巡检到轮式巡逻,从防爆检测到管道巡查,

巡检机器人有哪些功能和作用
在科技如此发达的时代,巡检机器人犹如一位不知疲倦的守护者,悄然走进了我们的生活。它们具备着令人惊叹的功能和作用,成为了保障安全、提高效率的重要力量。那么,巡检
轨道式机房巡检机器人
的先锋,让我们一起走近轨道式机房巡检机器人。 挂轨机房巡检机器人具备自主巡航、漏液检测、温湿度检测、有毒气体检测、自动充电等多项功能。采集到的数据可实时反馈到智能运维平台,管理人员可及
防爆轮式巡检机器人作用和优势?
在当今的工业领域,安全生产始终是至关重要的议题。而在一些具有爆炸风险的环境中,如石油、化工、燃气等行业,传统的人工巡检方式面临着诸多挑战。然而,随着科技的飞速发展,防爆轮式巡检机器人应

电石炉巡检机器人应用场景和功能
电石炉的工作环境通常极为恶劣,例如高温、高粉尘、高噪音等,人工巡检存在着诸多局限,如无法实时监测设备状态、容易出现人为疏忽和误判等。面对这些行业痛点,电石炉巡检机器人应运而生。电石炉
园区巡检机器人:释放园区管理新活力
存在着效率低、覆盖范围有限、安全隐患高等问题,给园区管理者带来了巨大挑战。面对这一痛点,园区巡检机器人应运而生,助力解决园区存在的问题。 园区巡检机器人轮式

皮带巡检机器人功能和优势
统计汇总耗时耗力,信息滞后严重,人员容易疲劳等问题。而皮带巡检机器人能很好协助人工解决这一问题。那么我们来说说皮带巡检机器人。 皮带
巡检机器人有哪些功能和作用?
在当今的科技时代,各行各业都在不断寻求创新和高效的解决方案。在这个背景下,巡检机器人应运而生,成为了众多领域的新兴力量。那么,巡检机器人有哪些功能和作用呢?
变电站智能巡检机器人的应用领域?
监控的难度。并且,人工巡检难以做到全面性,极易留下安全隐患。而变电站智能巡检机器人的出现则极大地改变了这一现状。那么接下来讲讲变电站巡检

机房巡检机器人功能和作用
不能得到保证。因此,机房巡检机器人的问世,极为妥善地解决了机房的安全稳定运行问题,同时提升了机房巡检效率,极大程度地降低了设备缺陷所带来的隐患,助力更多企业削减了成本开支。 机房巡检





 工商网监
工商网监
评论