 STM32定时器的几种用法
STM32定时器的几种用法
stm32的定时器的几种用法
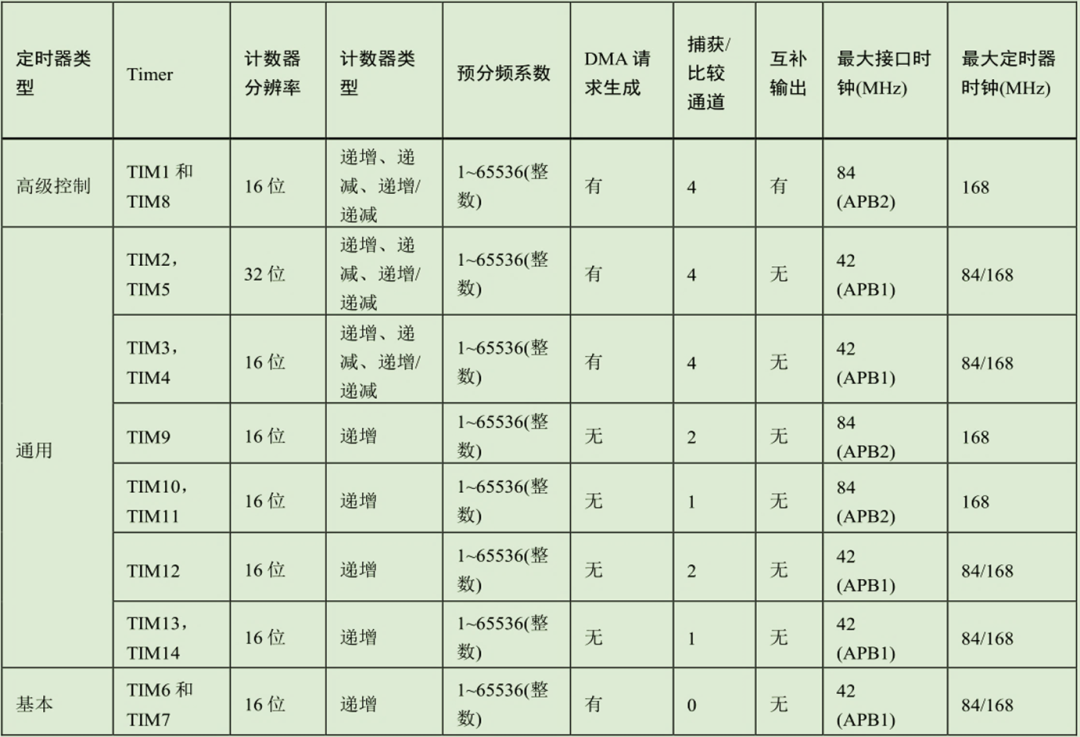
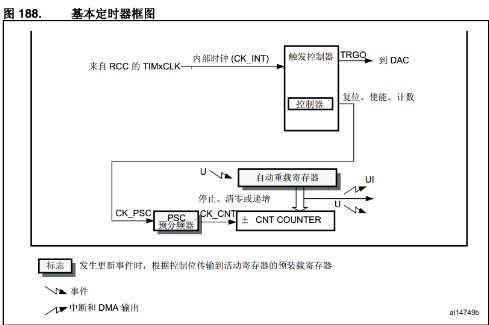
一、常用的定时功能
(1)基本、通用、高级定时器都有最基本的定时功能,定时功能用到的函数如下:
HAL_TIM_Base_Init 初始化定时,包括分频、 预装值等。
HAL_TIM_ConfigClockSource 选择定时器的时钟源
HAL_TIM_Base_Start_IT 开始定时器
HAL_TIM_PeriodElapsedCallback 超时后的回调函数
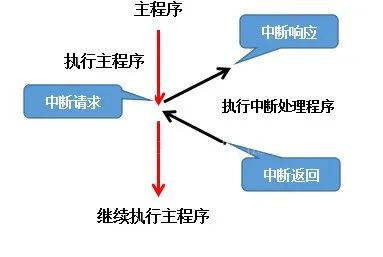
(2)Cubemx的配置,不管什么定时器,都是这个配置,注意开启中断,计算好最终的定时器时钟

(3)代码片段
1 void MX_TIM12_Init(void)
2 {
3 TIM_ClockConfigTypeDef sClockSourceConfig = {0};
4
5 htim12.Instance = TIM12;
6 htim12.Init.Prescaler = 199;
7 htim12.Init.CounterMode = TIM_COUNTERMODE_UP;
8 htim12.Init.Period = 999;
9 htim12.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
10 htim12.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
11 if (HAL_TIM_Base_Init(&htim12) != HAL_OK)
12 {
13 Error_Handler();
14 }
15 sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
16 if (HAL_TIM_ConfigClockSource(&htim12, &sClockSourceConfig) != HAL_OK)
17 {
18 Error_Handler();
19 }
20
21 }
22
23 int main(void)
24 {
33 HAL_Init();
34
35 /* USER CODE BEGIN Init */
36
37 /* USER CODE END Init */
38
39 /* Configure the system clock */
40 SystemClock_Config();
47 MX_GPIO_Init();
48 MX_TIM12_Init();
49 /* USER CODE BEGIN 2 */
50 HAL_TIM_Base_Start_IT(&htim12);
51 /* USER CODE END 2 */
52
53 /* Infinite loop */
54 /* USER CODE BEGIN WHILE */
55 while (1)
56 {
57 /* USER CODE END WHILE */
58 HAL_GPIO_TogglePin(GPIOF,GPIO_PIN_13);
59 HAL_Delay(1000);
60 /* USER CODE BEGIN 3 */
61 }
62 /* USER CODE END 3 */
63 }
64
65 void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
66 {
67 if(htim->Instance == TIM12)
68 {
69 static uint16_t cnt = 0;
70 if(++cnt >= 1000)
71 {
72 cnt = 0;
73 HAL_GPIO_TogglePin(GPIOH,GPIO_PIN_9);
74 }
75 }
76
77 }
二、使用通用定时器或者高级定时器来生产PWM波形
(1)使用通用定时器生成1路PWM
a.使用到的定时器API
HAL_TIM_PWM_Init
HAL_TIM_PWM_ConfigChannel
HAL_TIM_PWM_Start
__HAL_TIM_SET_COMPARE
b.Cubemx的配置

选择内部始终,Channel 1 为PWM生成。
根据配置信息,可知:
定义定时器预分频,定时器实际时钟频率为:200MHz/(GENERAL_TIMx_PRESCALER+1)
实际时钟频率为:20MHz
定义定时器周期,当定时器开始计数到GENERAL_TIMx_PERIOD值是更新定时器并生成对应事件和中断
定时器产生中断频率为:20MHz/(999+1)=20KHz,即50us定时周期
GENERAL_TIM_CH1_PULSE/GENERAL_TIM_PERIOD*100%
所以,以上配置生成的PWM的频率为20KHz,占空比为50%。
c. 代码实现
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM2_Init();
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_1);
while (1)
{
}
}
void MX_TIM2_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = 9;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 999;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 500;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_MspPostInit(&htim2);
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
STM32
+关注
关注
2270文章
10890浏览量
355636 -
定时
+关注
关注
1文章
122浏览量
25415 -
定时器
+关注
关注
23文章
3246浏览量
114693 -
代码
+关注
关注
30文章
4774浏览量
68504 -
回调函数
+关注
关注
0文章
87浏览量
11553
发布评论请先 登录
相关推荐
STM32有哪几种定时器 STM32高级定时器有哪些功能
SysTick定时器的功能比较单一,主要是供给系统使用的,系统默认设置为1ms触发一次中断。而用户想要使用自己的定时器,STM32提供的用户定时器不但数量多且功能更加强大。

定时器有如下几种功能用法
实现简述:定时器有如下几种功能用法:1>定时。使用内部时钟源2>PWM调制输出。使用内部时钟源3>脉冲宽度(频率)测量。使用内部时钟源,外部边沿触发4>脉冲数计数。使用外部
发表于 08-18 06:29
stm32定时器中断程序
STM32的定时器是个强大的模块,定时器使用的频率也是很高的,定时器可以做一些基本的定时,还可以做PWM输出或者输入捕获功能。 以下是进行
发表于 10-12 16:59
•1.3w次阅读
定时器的用法以及pwm的调速
今天我们来讲一下定时器的用法以及PWM的调速我们最初接触的51单片机有两组定时器(计数器),因为既可以定时,又可以计数,因此叫做
发表于 11-24 21:06
•5次下载

STM32定时器学习---基本定时器
STM32F1系列的产品,除了互联网产品外,工作8个,3种定时器,其中一种就是基本定时器。那么STM32单片机的基本定时器如何操作以及编程呢
发表于 12-02 14:06
•28次下载
STM32定时器的几种输出模式
最近有接触到通过可控硅的方式来控制交流风机或者电烙铁功率,STM32的定时器输出比较模式,刚好可以满足这种需求,借此机会总结一下定时器的几种输出模式。

STM32定时器的分类及中断原理
本文主要介绍常规定时器中的TIM3,实现定时器中断的功能。STM32定时器的分类在其中一篇文章中已经介绍过,本文主要内容主要介绍定时器的基础





 工商网监
工商网监
评论