 小米足式机器人专利曝光:前后双弹簧设计
小米足式机器人专利曝光:前后双弹簧设计
近日,北京小米移动软件有限公司“足式机器人的小腿结构和足式机器人”专利获授权。
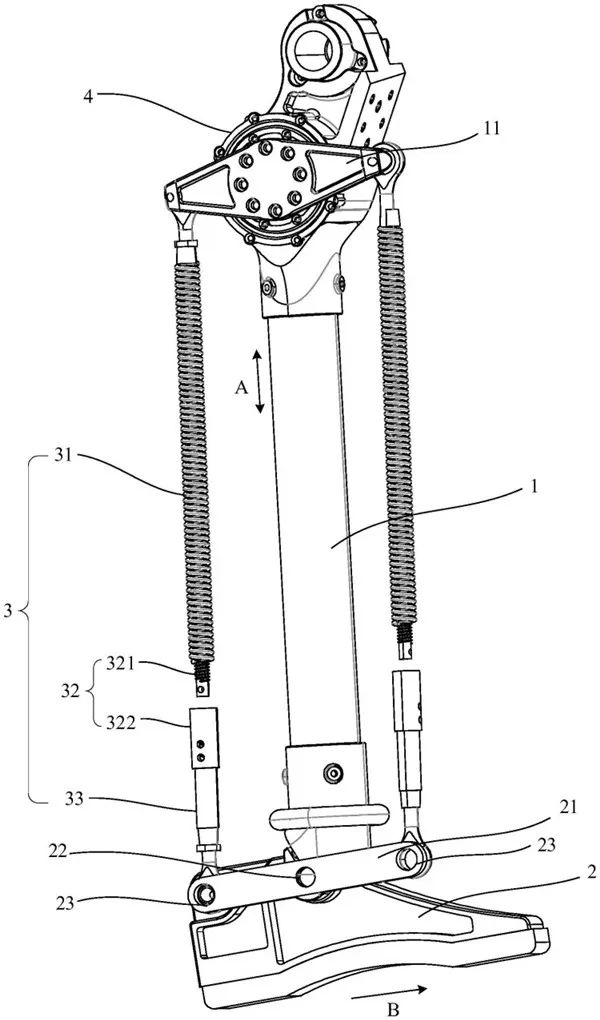
企查查专利摘要显示,该专利属于足式机器人技术领域,该足式机器人的小腿结构包括:腿部杆、足部和弹性连接机构,所述腿部杆的第一端与所述足部的第一位置可枢转地相连,所述弹性连接机构位于所述腿部杆的侧方,所述弹性连接机构与所述腿部杆的第二端相连,且与所述足部的第二位置相连。
通过在腿部杆的侧方设置弹性连接机构,弹性连接机构与腿部杆相连,且与足部相连,在足式机器人运动的过程中,弹性连接机构可以有效地吸收足部处产生的震动,提高机器人运动的稳定性,并减小震动对机器人造成的冲击,避免震动对机器人造成损坏。
去年8月,小米就曾发布了首款人形机器人“铁大(CyberOne)”,身高177厘米,体重52公斤,是一款全尺寸人形仿生机器人。官方表示,铁大背后的智能、机械能力,全部由小米机器人实验室全栈自研完成,相比之前的机械狗,它的研发难度更高。
官方同时表示铁大具有高情商、可感知人类情绪,视觉敏税、可对真实世界三维虛拟重建,“小脑”发达、可实现双足运动姿态平衡,四肢强健、动力峰值扭矩300Nm等领先能力。

审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28745浏览量
208904 -
仿生机器人
+关注
关注
1文章
70浏览量
15325
原文标题:小米足式机器人专利曝光:前后双弹簧设计
文章出处:【微信号:tjrobot,微信公众号:天津机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
广东新支柱产业“拼图”:深圳这四家人形机器人企业受关注
年 1 月 4 日,位于广东省深圳市,是一家专注于通用机器人研发制造的企业,聚焦于足式机器人的前沿研究,拥有感知、规划与控制、基础架构、硬件等多方面核心技术,推出了包括人形
发表于 02-14 00:03
•378次阅读
四足机器人的结构、控制及运动控制
四足机器人凭借其独特的地面接触方式和对复杂地形的出色适应能力,已成为自动化与机器人工程技术研究的焦点。近年来,在结构设计、运动规划和平衡控制等关键方面,四足

四足巡检机器人特点和作用是什么
,工作人员因空间限制难以躲避,伤亡风险极高。而四足巡检机器人以其独特魅力闯入人们视野。它巧妙模仿动物身体结构,拥有四条灵活的“腿”,在很多场景替代了人工巡检。 一、四足巡检机器人的特点

广汽轮足人形机器人,保安外卖家教样样来
不久前,广汽集团对外发布了自主研发的第三代具身智能人形机器人GoMate。这款全尺寸轮足人形机器人全身拥有38个自由度,在四轮足状态下高度约1.4米,两轮
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主机器人
发表于 01-04 19:22
开源项目!OpenCat—— 一个全能的平价四足机器人
OpenCat—— 面向 STEM(科学、技术、工程、数学)领域的平价四足机器人。一款可编程且机动性极强的机器猫,适用于 STEM(科学、技术、工程、数学)教育以及人工智能强化服务领域。
观看
发表于 12-16 11:44
在NVIDIA Isaac Lab中训练四足机器人运动
由于涉及复杂的动力学,为四足机器人制定有效的运动策略是机器人领域面临的重大挑战。在现实世界中训练四足机器人上下楼梯可能会损坏设备和环境,因此

Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
小米机器人公司获亦庄国投增资,专注仿生机器人技术创新
电子发烧友网报道(文/李弯弯)近日消息,北京小米机器人技术有限公司发生工商变更,新增亦庄国投旗下北京屹唐创欣创业投资中心(有限合伙)为股东,同时公司注册资本由5000万元增至约5555.56万元
小米机器人入驻小米汽车工厂,已研发铁大、铁蛋等机器人
6月5日消息,北京亦庄公众号发布文章,透露小米机器人技术有限公司(下文称小米机器人)近日在北京经济技术开发区(亦庄)举行了盛大的乔迁仪式。现场,小米
为什么四足机器人设计常借鉴狗的外形特征?
刘表示,机器狗是机器人的一部分,被称为“四足动物”,意思很明显是“四条腿”。四足机器人之所以多数被设计为狗,而不是马或兔子,是因为其特有的膝
发表于 04-10 14:30
•584次阅读
银牛微电子3D视觉感知方案赋能小米CyberDog系列仿生四足机器人
2024年3月21日,合肥银牛微电子宣布小米CyberDog系列仿生四足机器人的AI多模态融合感知决策系统正式采用银牛的双目立体视觉产品解决方案。





 工商网监
工商网监
评论