 STM32入门学习笔记之MPU6050传感器解析实验3
STM32入门学习笔记之MPU6050传感器解析实验3
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|
| SMPLRT_DIV[7:0] |
采样频率=陀螺仪输出频率/(1+SMPLRT_DIV)
(6) 配置寄存器 (地址:0x1A)
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|
| - | - | EXT_SYNC_SET[2:0] | DLPF_CFG[2:0] |
Bit 5~Bit 3:该段内的值确定采样的值将代替传感器数据寄存器中的最低有效位
0:输入禁用
1:TEMP_OUT_L寄存器第0位
2:GYRO_XOUT_L寄存器第0位
3:GYRO_YOUT_L寄存器第0位
4:GYRO_ZOUT_L寄存器第0位
5:ACCEL_XOUT_L寄存器第0位
6:ACCEL _YOUT_L寄存器第0位
7:ACCEL _ZOUT_L寄存器第0位
Bit 2~Bit 0:低通滤波器设置
| 值 | 加速度传感器(Fs=1kHz) | 角速度传感器 |
|---|---|---|
| 带宽(Hz) | 延迟(ms) | 带宽(Hz) |
| 000 | 260 | 0 |
| 001 | 184 | 2.0 |
| 010 | 94 | 3.0 |
| 011 | 44 | 4.9 |
| 100 | 21 | 8.5 |
| 101 | 10 | 13.8 |
| 110 | 5 | 19.0 |
| 111 | 保留 | 保留 |
(7) 电源管理寄存器2 (地址:0x6C)
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|
| LP_WAKE_CTRL[1:0] | STBY_XA | STBY_YA | STBY_ZA | STBY_XG | STBY_YG | XTBY_ZG |
Bit 7~Bit 6:低功耗模式下的唤醒频率
0:1.25Hz
1:5Hz
2:20Hz
3:40Hz
Bit 5:X轴加速度待机模式
0:禁用
1:启用
Bit 4:Y轴加速度待机模式
0:禁用
1:启用
Bit 3:Z轴加速度待机模式
0:禁用
1:启用
Bit 2:X轴陀螺仪待机模式
0:禁用
1:启用
Bit 1:Y轴陀螺仪待机模式
0:禁用
1:启用
Bit 0:Z轴陀螺仪待机模式
0:禁用
1:启用
19.3.2 源代码
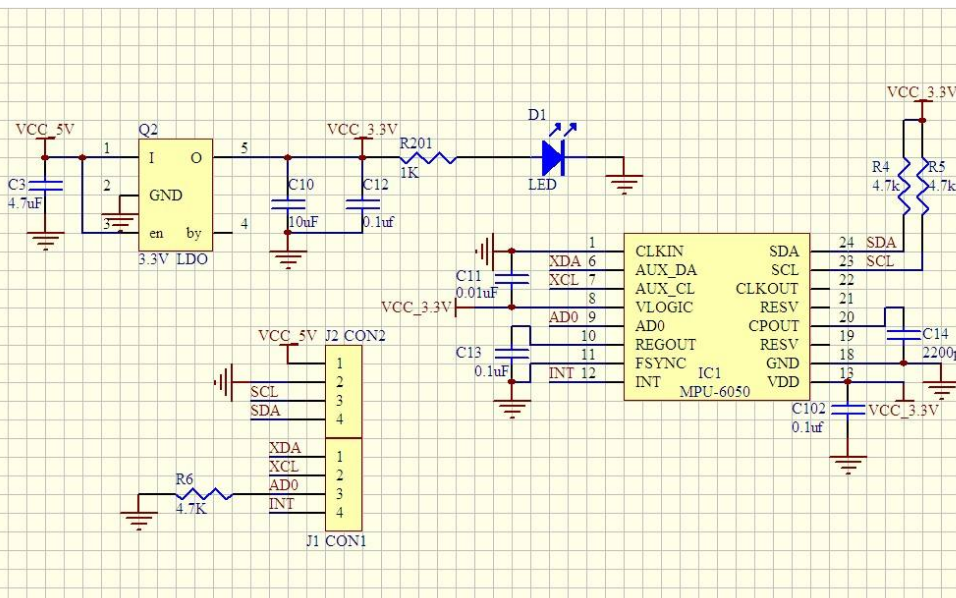
(1)创建mpu6050.h文件,输入以下代码。
/*********************************************************************************************************
MUP6050 驱 动 文 件
*********************************************************************************************************/
#ifndef _MPU6050_H_
#define _MPU6050_H_
#include "sys.h"
/*********************************************************************************************************
硬 件 端 口 定 义
*********************************************************************************************************/
#define MPU_IIC_SCL PBout( 10) //SCL
#define MPU_IIC_SDA PBout( 11 ) //SDA
#define MPU_READ_SDA PBin( 11 ) //输入SDA
#define MPU_AD0_CTRL PAout( 15 ) //控制AD0电平,从而控制MPU地址
/*********************************************************************************************************
数 据 结 构 定 义
*********************************************************************************************************/
//如果AD0脚(9脚)接地,IIC地址为0X68(不包含最低位)
//如果接V3.3,则IIC地址为0X69(不包含最低位)
#define MPU_ADDR 0X68
#define MPU_ACCEL_OFFS_REG 0X06 //accel_offs寄存器,可读取版本号,寄存器手册未提到
#define MPU_PROD_ID_REG 0X0C //prod id寄存器,在寄存器手册未提到
#define MPU_SELF_TESTX_REG 0X0D //自检寄存器X
#define MPU_SELF_TESTY_REG 0X0E //自检寄存器Y
#define MPU_SELF_TESTZ_REG 0X0F //自检寄存器Z
#define MPU_SELF_TESTA_REG 0X10 //自检寄存器A
#define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器
#define MPU_CFG_REG 0X1A //配置寄存器
#define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器
#define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器
#define MPU_MOTION_DET_REG 0X1F //运动检测阀值设置寄存器
#define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器
#define MPU_I2CMST_CTRL_REG 0X24 //IIC主机控制寄存器
#define MPU_I2CSLV0_ADDR_REG 0X25 //IIC从机0器件地址寄存器
#define MPU_I2CSLV0_REG 0X26 //IIC从机0数据地址寄存器
#define MPU_I2CSLV0_CTRL_REG 0X27 //IIC从机0控制寄存器
#define MPU_I2CSLV1_ADDR_REG 0X28 //IIC从机1器件地址寄存器
#define MPU_I2CSLV1_REG 0X29 //IIC从机1数据地址寄存器
#define MPU_I2CSLV1_CTRL_REG 0X2A //IIC从机1控制寄存器
#define MPU_I2CSLV2_ADDR_REG 0X2B //IIC从机2器件地址寄存器
#define MPU_I2CSLV2_REG 0X2C //IIC从机2数据地址寄存器
#define MPU_I2CSLV2_CTRL_REG 0X2D //IIC从机2控制寄存器
#define MPU_I2CSLV3_ADDR_REG 0X2E //IIC从机3器件地址寄存器
#define MPU_I2CSLV3_REG 0X2F //IIC从机3数据地址寄存器
#define MPU_I2CSLV3_CTRL_REG 0X30 //IIC从机3控制寄存器
#define MPU_I2CSLV4_ADDR_REG 0X31 //IIC从机4器件地址寄存器
#define MPU_I2CSLV4_REG 0X32 //IIC从机4数据地址寄存器
#define MPU_I2CSLV4_DO_REG 0X33 //IIC从机4写数据寄存器
#define MPU_I2CSLV4_CTRL_REG 0X34 //IIC从机4控制寄存器
#define MPU_I2CSLV4_DI_REG 0X35 //IIC从机4读数据寄存器
#define MPU_I2CMST_STA_REG 0X36 //IIC主机状态寄存器
#define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器
#define MPU_INT_EN_REG 0X38 //中断使能寄存器
#define MPU_INT_STA_REG 0X3A //中断状态寄存器
#define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器
#define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器
#define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器
#define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器
#define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器
#define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器
#define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器
#define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器
#define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器
#define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器
#define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器
#define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器
#define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器
#define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器
#define MPU_I2CSLV0_DO_REG 0X63 //IIC从机0数据寄存器
#define MPU_I2CSLV1_DO_REG 0X64 //IIC从机1数据寄存器
#define MPU_I2CSLV2_DO_REG 0X65 //IIC从机2数据寄存器
#define MPU_I2CSLV3_DO_REG 0X66 //IIC从机3数据寄存器
#define MPU_I2CMST_DELAY_REG 0X67 //IIC主机延时管理寄存器
#define MPU_SIGPATH_RST_REG 0X68 //信号通道复位寄存器
#define MPU_MDETECT_CTRL_REG 0X69 //运动检测控制寄存器
#define MPU_USER_CTRL_REG 0X6A //用户控制寄存器
#define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1
#define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2
#define MPU_FIFO_CNTH_REG 0X72 //FIFO计数寄存器高八位
#define MPU_FIFO_CNTL_REG 0X73 //FIFO计数寄存器低八位
#define MPU_FIFO_RW_REG 0X74 //FIFO读写寄存器
#define MPU_DEVICE_ID_REG 0X75 //器件ID寄存器
/*********************************************************************************************************
函 数 列 表
*********************************************************************************************************/
void MPU_IIC_Init( void ) ; //初始化IIC
u8 MPU_Init( void ) ; //初始化MPU6050
u8 MPU_Read_Len( u8 addr, u8 reg, u8 len, u8 *buf ) ; //IIC连续读
u8 MPU_Write_Len( u8 addr, u8 reg, u8 len, u8 *buf ) ; //IIC连续写
short MPU_Get_Temperature( void ) ; //获取温度
u8 MPU_Get_Gyroscope( short *gx, short *gy, short *gz ) ; //获取陀螺仪值
u8 MPU_Get_Accelerometer( short *ax, short *ay, short *az ) ; //获取加速度值
#endif
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2560文章
52099浏览量
761124 -
处理器
+关注
关注
68文章
19671浏览量
232628 -
MPU6050
+关注
关注
39文章
309浏览量
72371
发布评论请先 登录
相关推荐
基于stm32的mpu6050传感器实验 精选资料推荐
@TOCMPU6050+STM32学习笔记学习了差不多两天的mpu6050,参考了很多篇博客还有看一些资料,今晚终于把这个东西在我的串口显示
发表于 08-17 09:23
MPU6050六轴传感器简析
,总会有忘记的,所以来写这本书的随手笔记,记录重点、易忘点。该博客可以当做字典,也可以当做笔记。目前内容:MPU6050六轴传感器 一、什么是MPU
发表于 02-10 07:15
mpu6050六轴传感器模块驱动程序源代码分享
本文为大家分享了mpu6050六轴传感器模块驱动程序源代码,STM32F1读取MPU6050的加速度和角度传感器数据的初始化步骤,以及
发表于 12-11 14:26
•3.8w次阅读

使用STM32单片机读取MPU6050传感器数据的程序免费下载
本文档的主要内容详细介绍的是使用STM32单片机读取MPU6050传感器数据的程序免费下载。
发表于 07-26 17:35
•64次下载

基于stm32的mpu6050传感器实验
@TOCMPU6050+STM32学习笔记学习了差不多两天的mpu6050,参考了很多篇博客还有看一些资料,今晚终于把这个东西在我的串口显示
发表于 12-06 11:36
•9次下载

STM32入门学习笔记之MPU6050传感器解析实验1
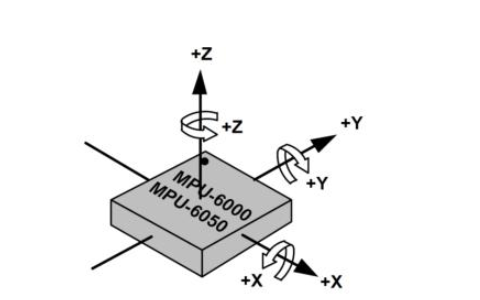
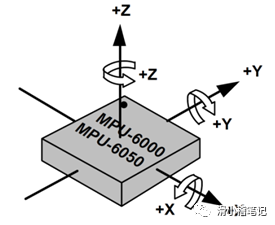
MPU6050是InvenSense公司推出的一款6轴运动处理芯片,内置3轴陀螺仪及3轴速度传感器,内置两组I2C接口,其中一组用于通信,另一组则用于连接外部磁力
STM32入门学习笔记之MPU6050传感器解析实验2
MPU6050是InvenSense公司推出的一款6轴运动处理芯片,内置3轴陀螺仪及3轴速度传感器,内置两组I2C接口,其中一组用于通信,另一组则用于连接外部磁力
STM32入门学习笔记之MPU6050传感器解析实验4
MPU6050是InvenSense公司推出的一款6轴运动处理芯片,内置3轴陀螺仪及3轴速度传感器,内置两组I2C接口,其中一组用于通信,另一组则用于连接外部磁力





 工商网监
工商网监
评论