 使用ADIS16209倾角仪进行倾斜测量的精度和可重复性
使用ADIS16209倾角仪进行倾斜测量的精度和可重复性
Ian Beavers
从理论上讲,这种技术可以通过使用多个传感器创建平均效应来帮助提高测斜仪测量的精度性能。潜在好处的原因是可以平均多个传感器之间的不相关误差源和随机噪声。这降低了聚合传感器数据的整体本底噪声,并允许目标聚合信号相对于噪声的功率更大。虽然MEMS设计团队推出了世界一流的传感器,但系统工程师将继续寻找最后一块增量性能。但是,警告是有序的,因为这不是绝对的情况,并且必须考虑系统设计的某些领域。
两个测斜仪传感器的输出可以使用微控制器内的后端数字处理进行求和和平均。测斜仪的主要标题规格是传感器倾斜到水平面的相对精度。通过组合信号输出,噪声密度降低,类似于2×过采样条件。同样,将四个测斜仪的信号输出组合并对其进行平均可以产生 4× 的改进方案。在理想情况下,使用四个平行倾角仪理论上可以将0.1°的精度降低到0.025°。
测斜仪之间微妙的内部非线性失配将表现出独特的传递曲线。虽然某些非线性由于架构而相似,但其他非线性由于部件之间的差异而有所不同。这些将表现为整体噪声源以及一般随机传感器噪声。我们可以将这些归为一类,称为噪声。一般来说,噪声主要与彼此不相关。使用多传感器系统方法的主要好处是平均这种白色随机噪声。相反,当相位和频率相关的不需要的信号相加时,它们的幅度将相加,对并行传感器方法没有任何好处。
当两个不相关的信号(如白噪声)相加时,它们在数学上组合为和方根(RSS)。这导致幅度增加一倍

对于两个相等的振幅。
如果Vnoise_rms = 一个传感器输入端的噪声,则两个通道上的平均噪声为:

通过添加相同相关信号的两个相同实例并求平均值,功率将几乎相同(2×相同信号的加法除以2),随机噪声将降低信号功率的一半。这会使整体平均信噪比(SNR)的3 dB信号功率理想增加。任何相互排斥的非线性或噪声仅受其中一个并行传感器的影响,而另一个传感器不会呈现给另一个传感器,这将降低部分全部优势。
然而,并行传感器系统设计有几个细节可能会阻止精度降低2×或4×的全部好处。首先,测斜仪需要受到设备比较轴上相同信号的同等影响。印刷电路板上的空间差异可能会通过每个测斜仪产生不同的观察结果。由于系统级影响,例如PCB厚度变化和焊接量公差,可能存在独特的偏移。其次,传感器之间的平行轴对齐应匹配。整个电路板装配中的标准方差将具有需要考虑的放置和θ公差。最后,零件间轴对准误差和非线性不匹配也会影响最佳设计和装配。该指标确定 x 轴和 y 轴彼此 90° 的垂直程度。传感器的数据表概述了这些规格。

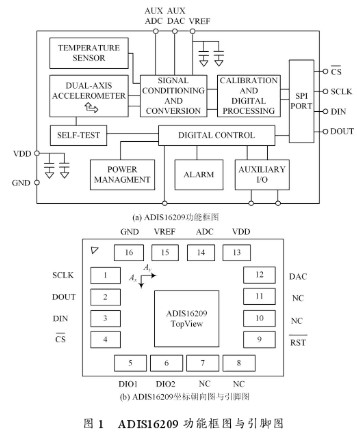
图1.对于ADIS16209等双轴倾角计,x轴和y轴对准的相对放置角精度将影响多传感器并行平均系统的全部优势。对于三轴加速度计系统,平行设备相对于 x/y 平面的平坦度或倾斜度将影响多个传感器之间的 z 轴对齐。
在系统调试时,任何已知的装配差异都应进行水平校准,以实现最大的并行效益。例如,测得的偏移偏置误差可以归零,并在测斜仪上调整零点以参考已知位置。ADIS16209提供自动零点选项,作为克服这些失调因素的方法。
审核编辑:郭婷
-
传感器
+关注
关注
2553文章
51511浏览量
757255 -
pcb
+关注
关注
4329文章
23188浏览量
400549 -
mems
+关注
关注
129文章
3968浏览量
191220
发布评论请先 登录
相关推荐
ADI高精度易使用的倾斜传感器ADIS16209
ADI公司高精度易使用的倾斜传感器
ADI超小型高精度双轴倾斜计传感器
ADIS16209的功能特性与实现倾角测量系统的设计
ADIS16209 高精度、双轴数字倾角计和加速度计
EVADIIS16209 ADIS16209/PCB分线板






 工商网监
工商网监
评论