 如何从外部优化降压稳压器ICS的频率响应
如何从外部优化降压稳压器ICS的频率响应
本应用笔记描述了外部补偿的工作原理,并提供了利用上述器件实现补偿的方法。通过外部补偿,通过添加带有反馈电路的简单RC网络,调整降压开关稳压器的频率响应,以增加或减少系统的带宽。
介绍
ADI公司的大多数开关稳压器允许用户调整内部控制环路。这通常是通过改变PGM(编程)组件从有限的可能配置中选择替代配置来实现的。但是,如果用户需要更大的灵活性,则实施外部补偿。本应用笔记提供了降压开关稳压器外部补偿的指南,这些稳压器使用CMC来优化其频率响应,即增加或减少系统带宽。
理论概述
为什么需要控制回路调整?
为什么需要调整控制回路有几个原因。主要是需要进行调整来解决不稳定的循环。不稳定的环路会降低设备的性能。这可能包括输出电压的不合理振荡或开关波形的过度抖动。
或者,用户可能需要调整控制环路以增加器件的带宽,从而提高瞬态性能。如果用户希望降低输出电容以减少BOM,但仍保持稳定的环路,则可能需要进行调整。
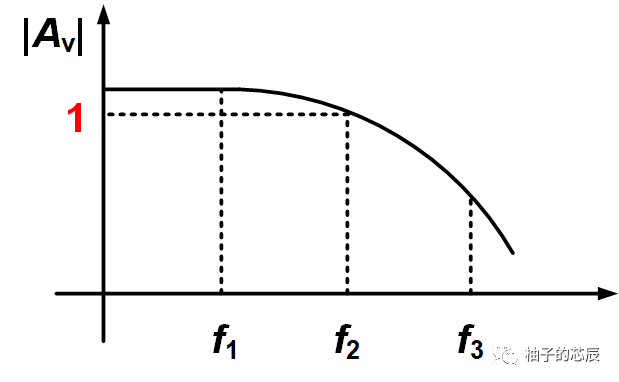
图1显示了使用CMC的典型降压转换器的近似增益幅度响应。
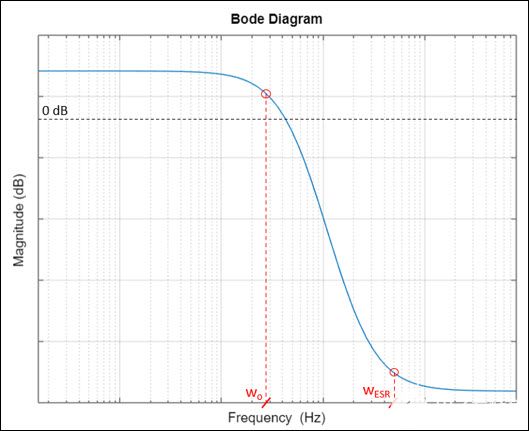
图1.典型降压转换器增益幅度响应(CMC)。
如图1所示,典型的CMC降压转换器频率响应包括一个固有极点和ωO和 ω红沉降率分别。极点ωO是“输出负载极点”。其位置与施加的负载电流成正比。而零 ω红沉降率由输出电容器的等效串联电阻 (ESR) 产生。通常,该零点要么被器件内部补偿中的极点抵消,要么被推到足够高的频率,使其影响可以忽略不计。
通常,CMC系统使用II类补偿(PI)进行内部补偿,这改善了稳态误差,并提供了交越频率的灵活性。 图2显示了具有II型补偿(近交越)的典型CMC的幅度响应。
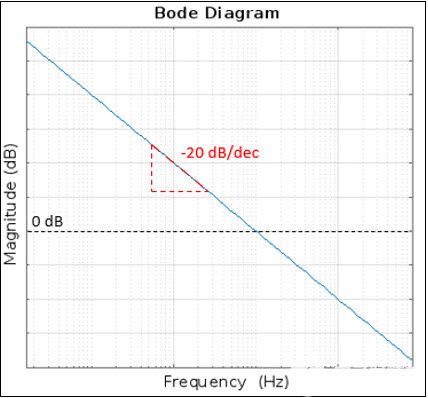
图2.典型降压转换器增益幅度响应(CMC),具有II类补偿。
具有II类补偿的典型降压转换器增益幅度响应(CMC)
固有极点和零点以及内部补偿可能无法提供用户所需的频率响应。在这种情况下,用户可以首先调整IC的内部控制回路,利用特定器件提供的可编程性。如果这不符合用户的要求,则需要外部补偿。这是通过在反馈电阻上并联添加RC(串联的电阻器和电容器)来实现超前或滞后补偿的形式实现的。
铅补偿
引线补偿的目的是在频率f处引入零点和极点Z和 fP分别,其中 fZ< fP.以下是引入铅补偿的可能动机:
更高的带宽(从而减少上升时间和建立时间)
更快的瞬态响应
提高稳定性(通过增加相位裕量)
引线补偿的一个可能的缺点是它可能会增加高频噪声。为了防止这种情况,以更高的频率放置一个极点。
图3显示了引线补偿对幅度和相位的影响。在此示例中,fZ= 10Hz 和 fP= 10kHz 使用。
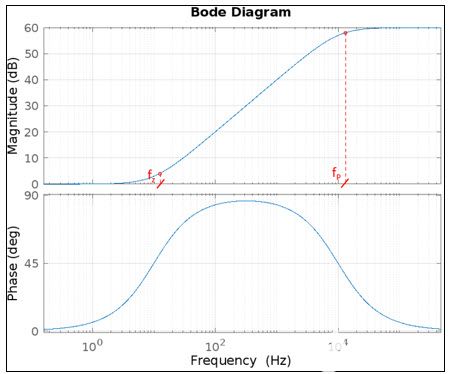
图3.导联补偿频率响应。
滞后补偿
滞后补偿的目的是在频率f处引入极点和零点P和 fZ分别,其中 fP< fZ(<
图4显示了滞后补偿对幅度和相位的影响。在此示例中,fP= 10Hz 和 fZ= 10kHz 使用。
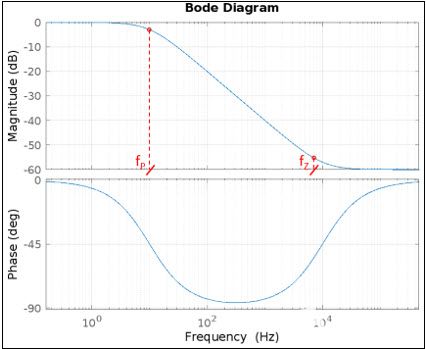
图4.滞后补偿频率响应。
CMC 降压转换器的控制环路带宽 (BW)
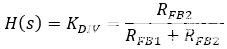
对于负载点降压转换器(MAX20710、MAX20812等),控制环路带宽与反馈分压器比成正比,下式计算:
等式 1
其中
是从 VOUT 到 VSENSE 的反馈分频器
COUT是输出电容
G为可编程环路增益(从IC数据手册获得)
对于给定的“G”和“COUT”(根据电路要求固定),带宽减少到:

等式 2
因此,通过改变反馈比同时保持其直流比恒定(以保持所需的基准电压),用户可以增加或减少带宽。
* COUT的计算包括其在额定输出电压下的降额
* 这种外部补偿方法适用于所有带宽与反馈比成正比的IC(如下式2)
电路实现
超前和滞后补偿是通过在开关稳压器IC外部的反馈电阻并联添加RC网络(串联的电阻和电容器)来实现的。对于引线补偿(如图5a所示),在顶部反馈电阻(R认知障碍).对于滞后补偿(如图5b所示),在底部反馈电阻(R认知障碍).
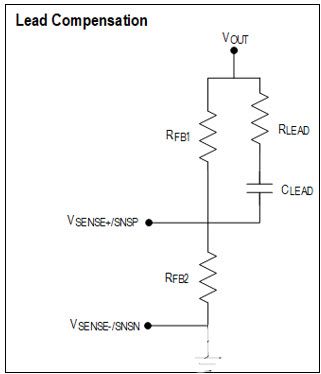
图 5a.引线补偿电路图。
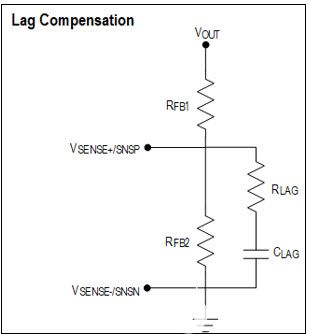
图 5b.滞后补偿电路图。
补偿对环路增益的影响 - T(s)
对于降压稳压器,典型环路增益T(s)如图6所示。
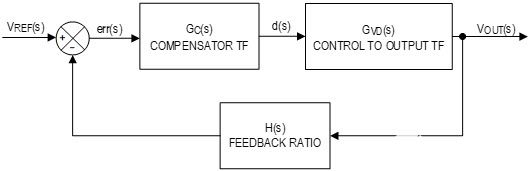
图6.闭环降压稳压器框图
环路增益 T(s) 写为:
T(s) = GC(s) × GVC(s) × H(S)
哪里
从公式2
其中,
GC(s) 是内部补偿器 TF
GVC(s) 控制降压开关稳压器的输出TF
铅补偿:
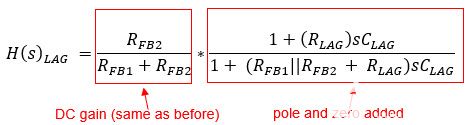
包括铅补偿后,术语H(s)将修改为以下内容:
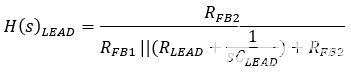
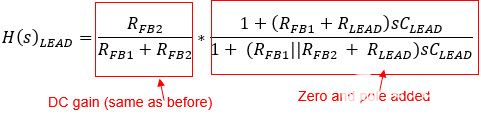
等式 3
R的串联组合铅和 C铅在 F 处添加一个零点和极点Z和 fP给出者:

结果 1
并且观察到 FZ
因此,更新的环路增益T(s)LEAD为:

等式 4
下一节将进一步详细分析公式4。
滞后补偿:
与铅一样,包括滞后补偿,术语H(s)被修改为:
等式 5
R的串联组合滞后和 C滞后在 F 处添加一个零点和极点Z和 fP给出者:

结果 2
并且观察到P< fZ
因此,通过滞后补偿,环路增益为:

等式 6
等式3和等式5证实,H(s)=KDIV(即,根据公式2与BW成正比),根据极点零对的位置进行修改。增加的极点-零点对根据频率和R的值提供一定的增益/衰减铅/滞后和 C铅/滞后.这用于增加或减少当前 BW。
因此,在反馈电阻两端增加串联RC网络会改变系统环路增益,最终改变转换器的有效带宽。为了分析新增加的极点和零点的影响,分别考虑超前和滞后补偿。此外,极点-零点对提供的增益取决于频率,因此使用波特图的频域方法来分析获得的结果。
带导联补偿的环路增益分析
导联补偿的主要目标是在环路增益T(s)下获得带宽的最大改善。本节提供元件选择的设计方法(R铅和 C铅),目的是获得给定系统的最大带宽。
图7所示为典型的补偿电流模式控制系统。包括引线补偿(外部)时,以下是响应(显示图7a所示系统交叉点附近的典型响应):
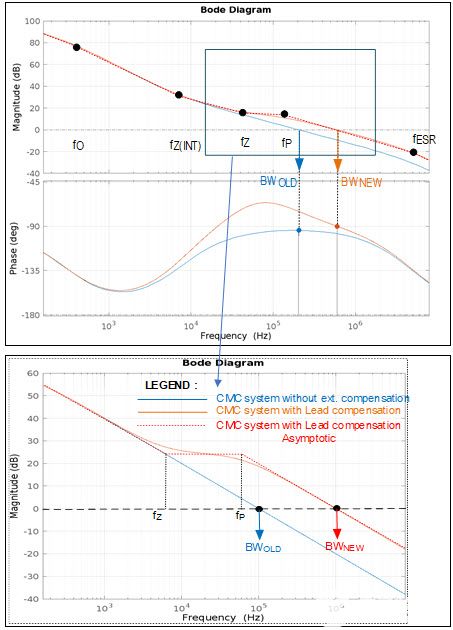
图7.铅补偿系统的频率响应在典型CMC系统上的叠加。
图 7a.图 7 的放大版本。
观察到新添加的零点和极点在fZ和 fP使具有引线补偿的系统具有从F开始的额外增益Z,这有效地导致带宽得到改善,因为补偿系统在带宽处越过0dB线新增功能.
从图 4 所示的图中,通过几何图形得出结论:
Log(ƒp) - Log(ƒz) = Log(BWNEW) - Log(BWOLD)
这意味着,
BWNEW = BWOLD × (ƒp / ƒZ) 等式 7
这里
BWNEW - 表示具有导联补偿的新交越频率
BWOLD - 表示交越频率,无需外部补偿
公式7是一个重要结论,因为它将带宽改进与极零对频率之比直接联系起来。该公式用于推导出RLEAD和CLEAD的值,它们提供了最大的带宽改进。
此外,从公式7可以清楚地看出,对于最大带宽,极零点频率比应该是最大值。
在数学上(将结果 1 代入公式 7 的 LHS),比率简化为:
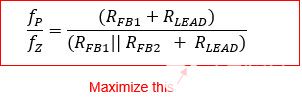
等式 8
通过分析,观察到公式8的最大值是在以下情况下获得的:
R铅<<·认知障碍||R认知障碍
由于R的推荐值认知障碍/ 1认知障碍在1kΩ至5kΩ之间,用户可以选择R铅为任何值 <5Ω。
因此,对于给定的反馈电阻值,BW新增功能根据公式 7a 计算:

公式7a是计算最大带宽的有用工具新增功能这是在给定的反馈电阻值(即给定电压)下实现的。
通过仔细选择 R 最大化 BW铅、C 的值铅决定 f 的位置Z和 fP.极点零点对的位置也会影响带宽和相位裕量改进。
为了获得最佳情况,将极点零点位置从低频(低至100Hz)扫描到可能的最高频率(由BW确定)老) 通过保持 R铅恒定和变化的C铅价值。
在这里,最高频率是提供最小 C 值的频率铅,当 fZ= BW老.选择高于此频率不会为系统提供导联线补偿。要避免这种情况,请选择 C铅大于以下值:
将极点零点对放置在最高频率附近(BWOLD之前)并不能提供带宽的最大改善,因为与渐近图相比,幅度图(实际图)的交叉时间要早得多。但这种方法为系统提供了相位裕量的最大增量。
将极点零点对放置在较低频率(< 1kHz)下可大幅降低系统的PM,但也提供了带宽的最大改进。
因此,极零点对的最佳位置是带宽最大,PM降低最小的地方。这介于高频和低频之间。
因此,为了在略微降低PM的情况下最大限度地改善带宽,使用公式9来计算C的值铅.该结果是通过将fP放置在BW的1/10获得的老如下图所示:
这意味着,CLEAD的计算公式为:

等式 9
例如,如果系统的要求不仅仅是最大带宽,而是提高带宽和PM的功率,那么C铅减少以调整所需的最佳情况。降低 C铅减少了带宽的改进,但增加了系统的PM。
以下是 C 的范围铅:
为了改善体重和粉末反射,但不能改善最大体重:

对于最大带宽(PM 没有改善):

引线补偿硬件测试和结果
上述理论利用MAX20710和MAX20812评估板进行测试。多个 C外数值用于验证理论和实践结果的一致性。此处显示了其中一个结果。
为了进行测试,将串联R-C网络与RFB1并联添加,用于使用上述公式计算的导线补偿和串联元件的值。用于实验的组分具有1%(R铅和 C铅).
进行的测试使用公式9计算C铅.该测试的主要目的是在PM降低最小的情况下获得最大的BW。
MAX20710评估板得到C结果外= 1600μF
以下是用于测试的值,它还包括 fZ和 fP使用所用组件获得的值。
| RFB1 and RFB2 | VOUT | RLEAD (Ω) | CLEAD (Calculated) | CLEAD (Used in Ckt) | fZ (kHz) | fP (kHz) |
| 1.87kΩ 和 3.48kΩ | 1V | 0 | 19.5nF | 18.3nF | 4.67 | 7.21 |
| - | 带宽(千赫) | 下午 (°) |
| 空载 | ||
| 无偿 | 67.436 | 58.876 |
| 铅补偿 | 98.408 | 49.769 |
| 满载 | ||
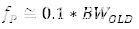
| 无偿 | 69.285 | 58.037 |
| 铅补偿 | 112.604 | 50.257 |
根据公式7a,可实现的最大改进为103.673kHz。
从表2的结果可以看出,改善与BW的计算值完全匹配新增功能即 BW老按极点到零频率比缩放。
如前所述,尽管这种方法提供了带宽的最大改善,但系统的PM略有降低(~8°),这主要是由于系统在较高BW下的较低相位。这是通过稍微减小 C 的值来调整的铅.
降低 C铅值可能会略微降低带宽,但会改善PM,因为引线补偿提供了一些相位提升。
因此,公式9为最大带宽改进提供了最佳结果。这始终是执行首次通过结果的领先补偿的良好起点。
注意:最大带宽改进根据 R 的值推迟认知障碍和 R认知障碍,即不同 V 的不同改进外.
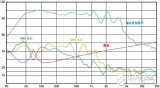
如图8a和图8b所示,以下是满载= 10A情况下环路增益的波特图(值如表2所示)。
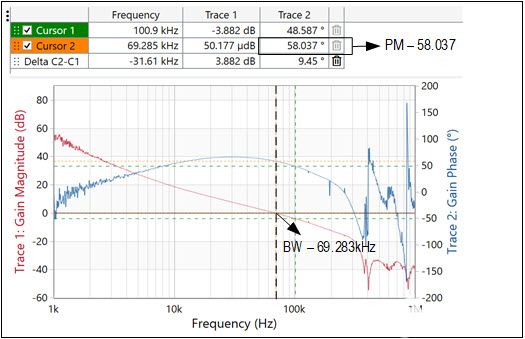
图 8a.显示未补偿的 s/m。
图 8b. 显示铅补偿 s/m。
BW(频域)的增加直接转化为系统瞬态响应(时域)的改进,即随着带宽的增加,系统对干扰的响应更快。
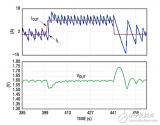
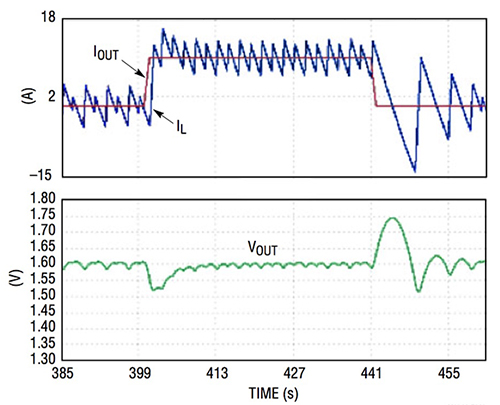
使用2A至10A的脉冲负载和8A/μs斜坡测试响应,结果如图9a和图9b所示。
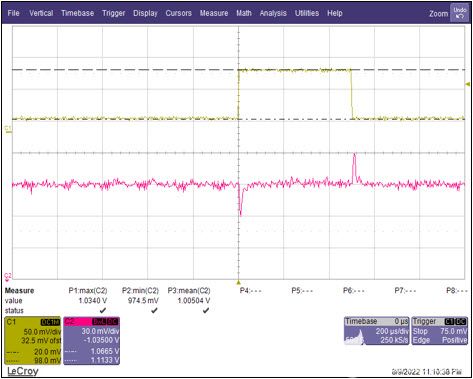
图 9a.使用 C 显示未补偿的 s/m外= 1600μF。
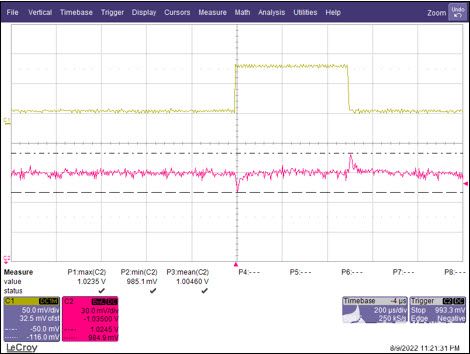
图 9b. 显示带 C 的铅补偿 s/m外= 1600μF。
| 过头 | |
| V中的未补偿过冲出峰(毫伏) | 28.8 |
| V级导线补偿过冲出峰(毫伏) | 17.7 |
| Δ V出峰- 过冲减少(mV) | 11.1 |
| 负脉冲信号 | |
| V中的无补偿下冲出峰(毫伏) | 30 |
| V级铅补偿下冲出峰(毫伏) | 21.9 |
| Δ V出峰- 下冲减少(mV) | 8.1 |
观察到瞬态期间的下冲和过冲在带宽改善后降低了~8mv至10mV。因此,这是通过最后一刻调整来满足规格的好方法。
MAX20812评估板C结果外= 870μF
对MAX20812评估板进行类似的分析,元件值如表4所示。
| RFB1 and RFB2 | VOUT | RLEAD (Ω) | CLEAD (Calculated) | CLEAD (Used in Ckt) | fZ (kHz) | fP (kHz) |
| 3.01kΩ 和 3.01kΩ | 1V | 0 | 25.6nF | 25.3nF | 2.09 | 4.18 |
| - | 带宽(千赫) | 下午 (°) |
| 空载 | ||
| 无偿 | 41.341 | 64.924 |
| 铅补偿 | 78.106 | 61.112 |
| 满载 | ||
| 无偿 | 46.893 | 68.28 |
| 铅补偿 | 82.685 | 62.05 |
同样,根据公式7a,可实现的最大改进为82.682kHz。
从表5的结果可以看出,改善与BW的计算值完全匹配新增功能,即 BW老按极点到零频率比缩放。
对MAX20710的要求需要更多改进的原因是R的差异认知障碍和 R认知障碍在相同输出电压下,MAX20812与MAX20710的比较值,最终改变公式7a中的极点至零频率比。因此,为了更好地改进 BW,具有较低值 R 的配置。认知障碍(与 R 相比认知障碍) 是优选的。
如图10a和图10b所示,以下是满载= 6A时环路增益的波特图(值如表5所示)。
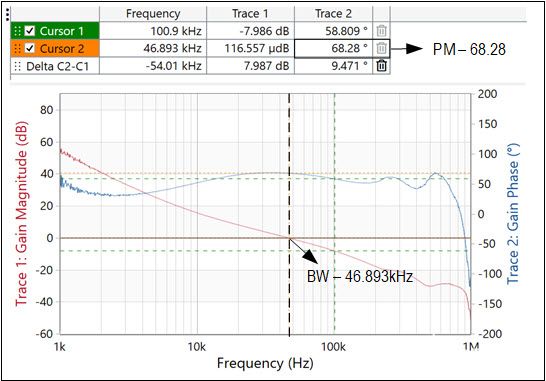
图 10a.显示未补偿的 s/m 波特。
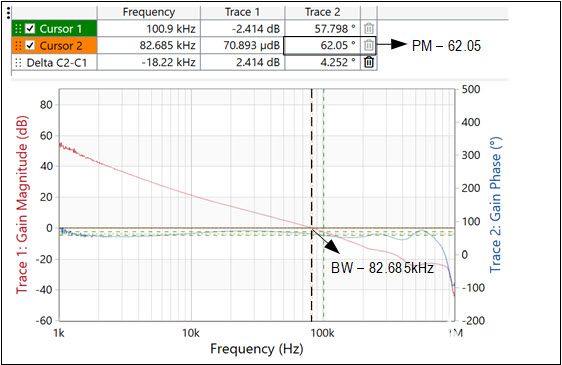
图 10b. 显示铅补偿 s/m 值。
对于1A至6A的脉冲负载和5A/μs斜坡,瞬态响应改进如下:
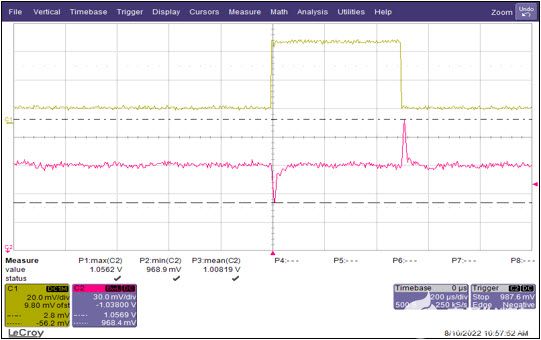
图 11a.使用 C 显示未补偿的 s/m外= 870μF。

图 11b. 显示带 C 的铅补偿 s/m外= 870μF。
| Overshoot | |
| Uncompensated Overshoot in VOUT PEAK (mV) | 48.1 |
| Lead compensated Overshoot in VOUT PEAK (mV) | 27.1 |
| Δ VOUT PEAK - Overshoot reduction (mV) | 21.1 |
| Undershoot | |
| Uncompensated Undershoot in VOUT PEAK (mV) | 33.5 |
| Lead compensated Undershoot in VOUT PEAK (mV) | 22.5 |
| Δ VOUT PEAK - Undershoot reduction (mV) | 11.1 |
电压的下冲和过冲降低了10mV至20mV,这是巨大的,与MAX20710以前的情况相比,这更好。这仅仅是由于MAX20812情况下带宽增加更多。
从上述结果可以看出,超前补偿是通过在R上添加一个简单的串联RC网络来实现的。认知障碍,其中 BW 的最大改进受 f 位置的限制Z和 R 的值认知障碍和 R认知障碍.这种补偿方法仅用于在一定程度上改善BW;因此,当系统的所有其他组件都使用变量C固定时,使用外部补偿外要求。因此,如果需要在最后一刻进行带宽修改(有/没有PM改进),则铅补偿是实现它的最佳方法。
带滞后补偿的环路增益
滞后补偿的主要目的是改善相位裕量(PM)并降低环路增益T(s)的带宽(假设系统在较低的带宽下PM较高)。这是在系统具有低 C 的情况下完成的外值,这会导致带宽接近开关频率 (f西 南部),导致系统中的噪声较高。
本节提供元件选择的设计方法(R滞后和 C滞后),目的是减少交叉并在新的BW上改善PM。
注意:不要最大化带宽降低,因为这会降低系统性能。
图12所示为典型的补偿电流模式控制系统。包含滞后补偿后,叠加图就是响应。
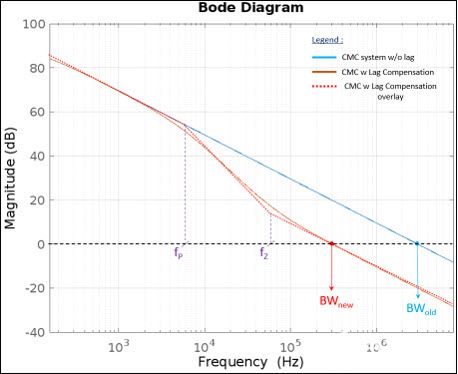
图 12.滞后补偿系统的频率响应在典型CMC系统上的叠加。
设计方法与引线补偿方法略有不同。在这里,PM改进是从系统(即没有外部补偿)而不是从滞后补偿中获得的。事实上,滞后补偿对系统相位的影响会减弱,如图4所示。
因此,对于滞后补偿系统,PM最佳改进(以较低带宽从系统获得)的标准是:
对于计算,用户可以考虑边界情况,即

选择 CLAG= 10nF(以获得最佳带宽降低并避免环路不稳定问题)。增加 C 的值滞后大幅降低带宽,因为 fP放置在小于500Hz的频率下,这导致增益曲线更快地越过0dB。
R 的值滞后根据结果 2 计算得出,由下式给出:
等式 10
因此,R 的任何值滞后大于或等于公式10中的值可提供滞后补偿的最佳结果。
对于较低的带宽,fZ进一步向下移动(即 fZ< 0.1BW老) 通过增加 C滞后并降低 R 的值滞后.这会将极点-零点对移动到较低的频率,从而进一步改善系统的PM。
BW的价值新增功能通过滞后补偿从上述 R 获得滞后和 C滞后值提供 F 的最小减少C这样补偿系统的PM就不会因滞后补偿而降低。
滞后补偿硬件测试和结果
上述理论利用MAX20710和MAX20812评估板进行测试。为了进行测试,与R并联添加串联R-C网络认知障碍,并使用上述方程计算序列元素的值。用于实验的组分具有1%(R滞后和 C滞后).对于这两种情况,C滞后使用 10nF(根据建议)。
以下是每个评估板的结果:
MAX20710评估板得到C结果外= 800μF
以下是用于测试的值,它还包括 fZ和 fP从使用的组件获得的值。
| RFB1 and RFB2 | VOUT | CLAG | RLAG (Calculated) | RLAG (Used in Ckt) | fZ (kHz) | fP (kHz) |
| 1.87kΩ 和 3.48kΩ | 1V | 10nF | 1.35kΩ | 1.5kΩ | 12.566 | 6.41 |
| - | 带宽(千赫) | 下午 (°) |
| 空载 | ||
| 无偿 | 125.669 | 37.984 |
| 滞后补偿 | 84.523 | 54.438 |
| 满载 – 6A | ||
| 无偿 | 127.192 | 38.13 |
| 滞后补偿 | 83.319 | 54.198 |
从上述结果可以看出,随着交越频率或带宽的降低,PM改善了~20°。对于分频器的轻微修改,R滞后进一步调整(如前所述),但这仅将分频器偏移了很小的幅度。
图13a和图13b显示了满载= 10A时环路增益的波特响应(值如表8所示)。
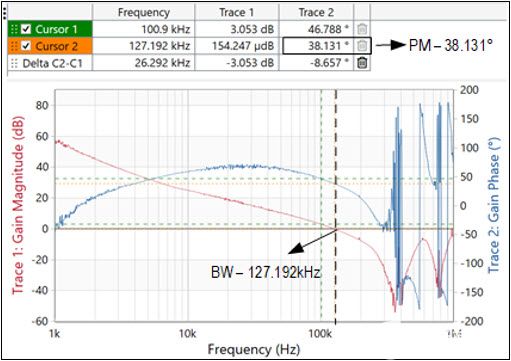
图 13a.显示未补偿的 s/m 波特。
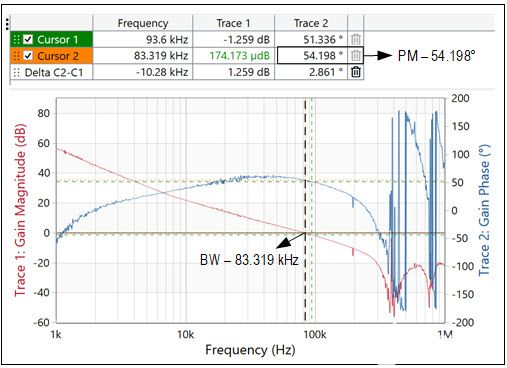
图 13b. 显示了滞后补偿的 s/m 波特。
MAX20812评估板得到C结果外= 270.1μF
对MAX20812评估板进行类似的分析,元件值如表9所示。
| RFB1 and RFB2 | VOUT | CLAG | RLAG (Calculated) | RLAG (Used in Ckt) | fZ (kHz) | fP (kHz) |
| 3.01kΩ 和 3.01kΩ | 1V | 10nF | 1.4249kΩ | 1.42kΩ | 11.169 | 6.025 |
表9显示了组分值和其他计算量。
| RFB1 and RFB2 | VOUT | CLAG | RLAG (Calculated) | RLAG (Used in Ckt) | fZ (kHz) | fP (kHz) |
| 3.01kΩ 和 3.01kΩ | 1V | 10nF | 1.4249kΩ | 1.42kΩ | 11.169 | 6.025 |
| - | 带宽(千赫) | 下午 (°) |
| 空载 | ||
| 无偿 | 111.69 | 55.714 |
| 滞后补偿 | 65.898 | 63.079 |
| 满载 – 6A | ||
| 无偿 | 131.651 | 52.574 |
| 滞后补偿 | 70.925 | 66.9 |
在这种情况下,改进了~11°,低于前一种情况,因为这种改进来自系统本身,不依赖于补偿。
图14a和图14b显示了满载= 6A时补偿和未补偿系统的波特图(值如表10所示)。
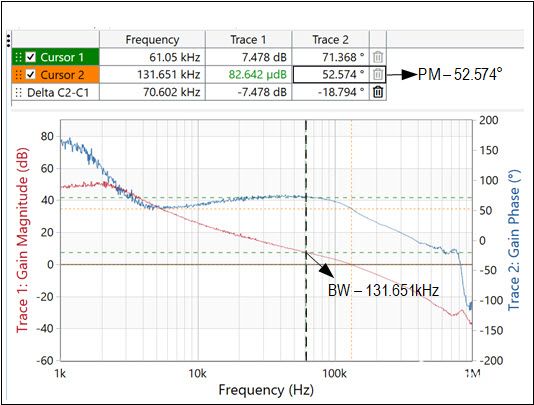
图 14a.显示未补偿的 s/m 波特。
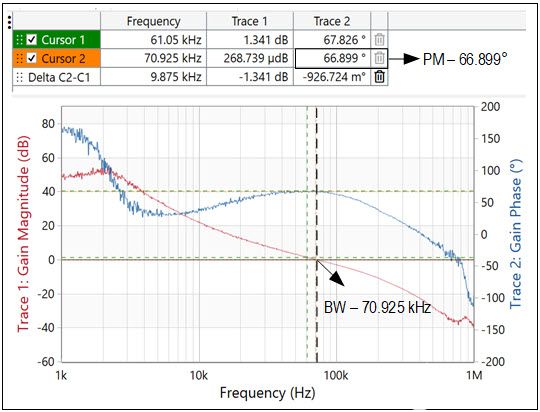
图 14b. 显示铅补偿 s/m 值。
如前所述,滞后补偿并不经常使用,它主要用于系统C低的情况外计数(即高交越频率)。
虽然,通过这种方法用户可以将BW推到一个低得多的值,但建议不要低于f的1/10西 南部,因为系统性能下降主要与瞬态行为有关。
因此,滞后补偿是改善PM的最佳方法之一,并具有降低系统带宽的额外好处。
结论
外部补偿获得的结果适用于文档开头提到的部件号。它也可以应用于任何其他ADI的电源管理IC,这些IC具有类似形式的带宽方程,即与反馈比成正比。
在这种情况下,建议在反馈电阻两端安装一个用于RC网络的DNI/DNP焊盘,这在电路板的测试阶段带来了灵活性,以获得必要的稳定性裕量。
综上所述,外部补偿是提升原始系统性能的方法之一。
审核编辑:郭婷
-
转换器
+关注
关注
27文章
8694浏览量
147085 -
电阻器
+关注
关注
21文章
3779浏览量
62114 -
稳压器
+关注
关注
24文章
4223浏览量
93760
发布评论请先 登录
相关推荐
改善开关稳压器频率响应的补偿器网络设计
频率响应是什么意思_频率响应特性
频率响应介绍_频率响应概念

音响频率响应多少好_频率响应大好还是小好





 工商网监
工商网监
评论