 分享一下运动控制卡之ECIO系列IO卡的用法
分享一下运动控制卡之ECIO系列IO卡的用法
今天,给大家分享一下运动控制卡之ECIO系列IO卡的用法,C#语言进行ECI IO卡的开发以及测试多个IO读写的交互速度。
01 ECI0032/ECI0064 IO卡硬件介绍
1.功能介绍
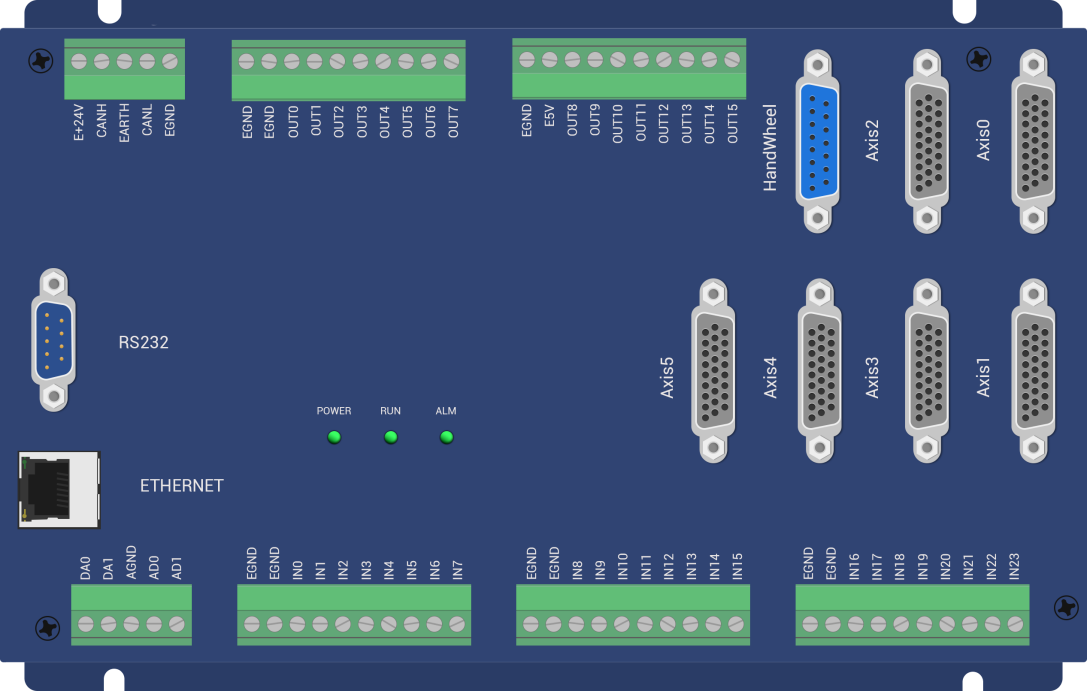
ECI0032/ECI0064等ECI0系列运动控制卡支持以太网、RS232通讯接口和电脑相连,接收电脑的指令运行,可以通过CAN总线连接各个扩展模块,从而扩展输入输出点数。
ECI0032/ECI0064等ECI0系列采用了优化的网络通讯协议,可以实现实时的逻辑控制和IO状态的监控。
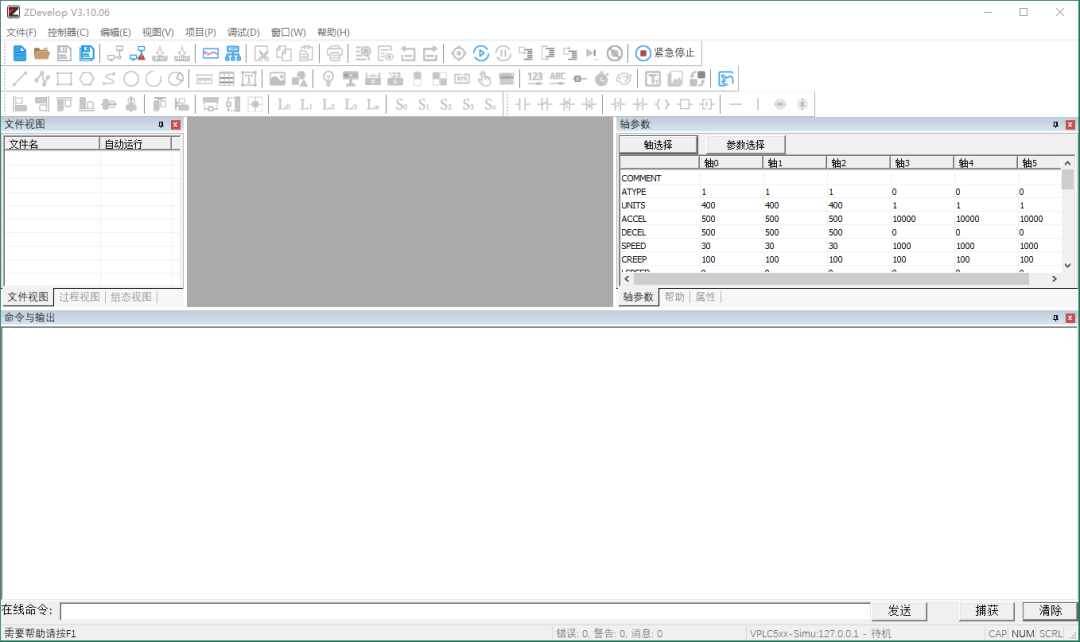
ECI0032/ECI0064等ECI0系列IO卡的应用程序可以使用VC,VB,VS,C++,C#等软件开发,程序运行时需要动态库zmotion.dll,调试时可以将ZDevelop软件同时连接控制器,从而方便调试、方便观察。

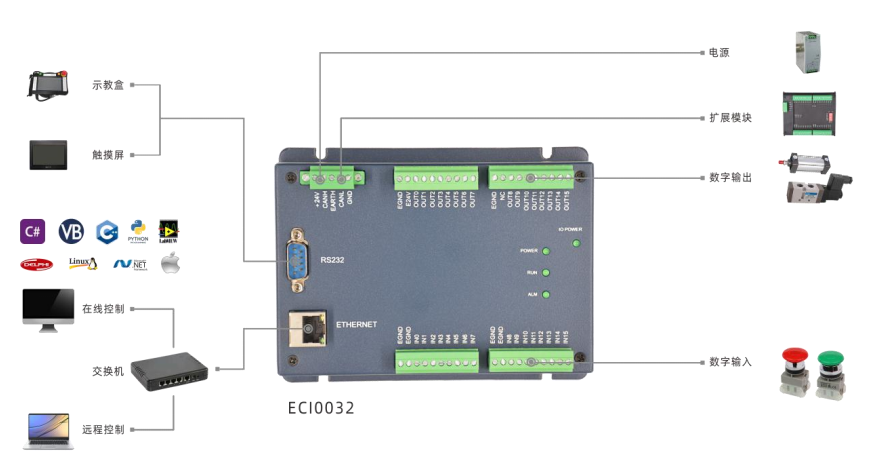
ECI0032系统架构图
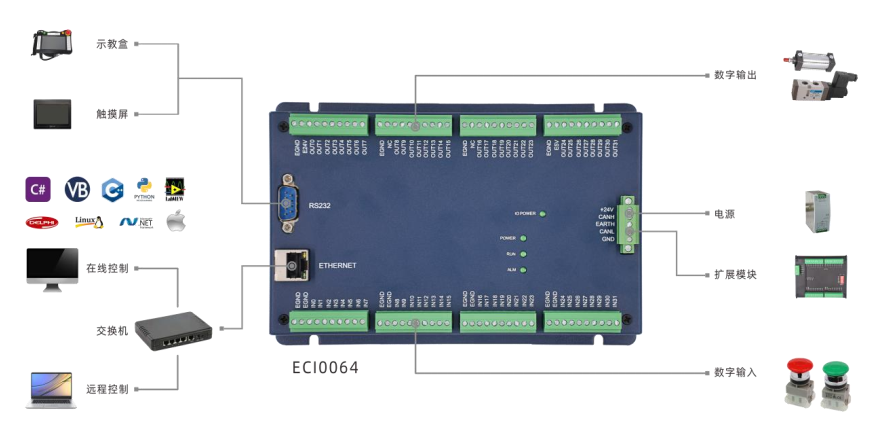
ECI0064系统架构图
2.硬件接口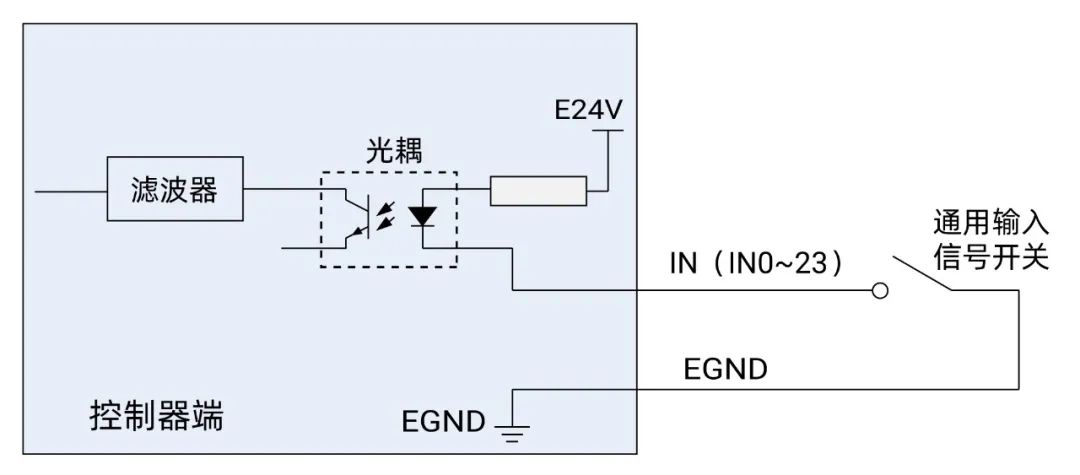
通用输入口电路图
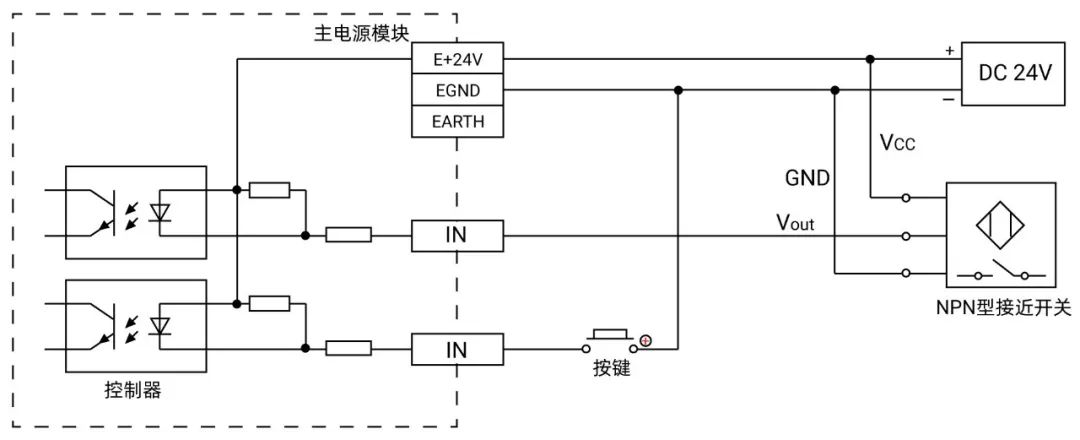
通用输入口接线参考图
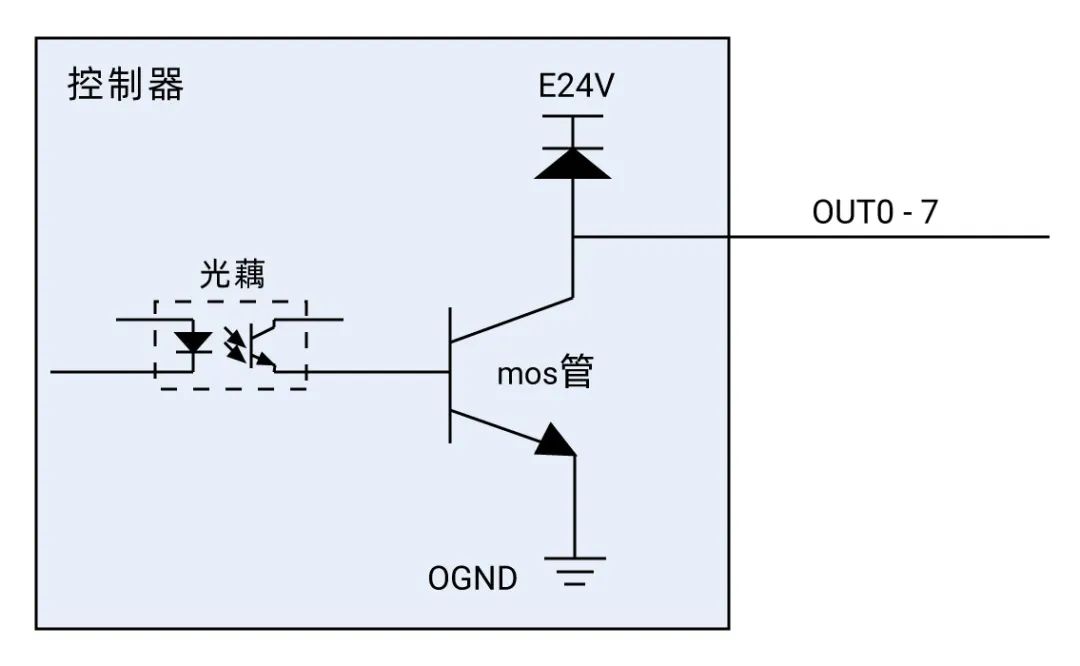
通用输出口电路图
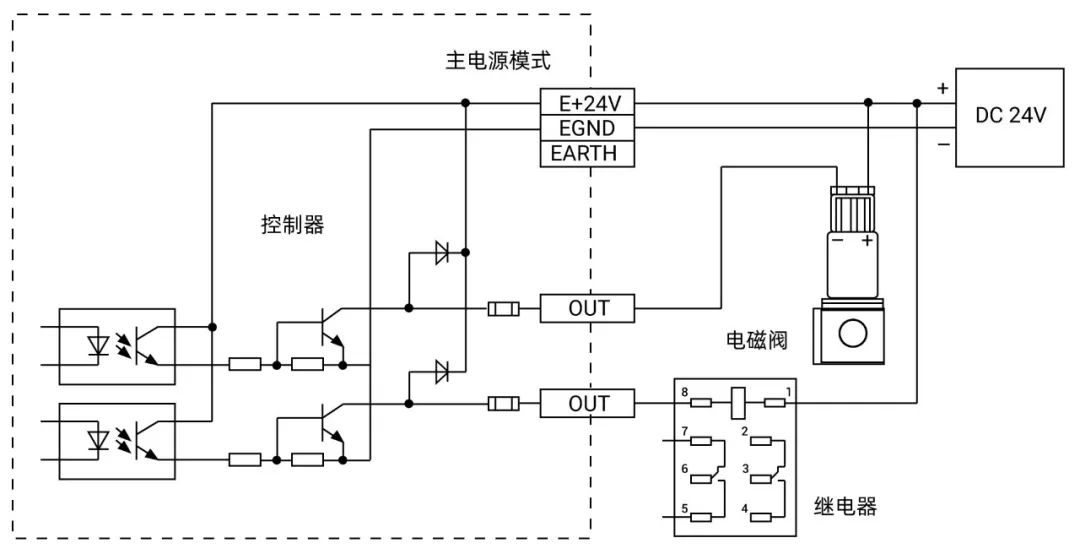
通用输出口接线参考图
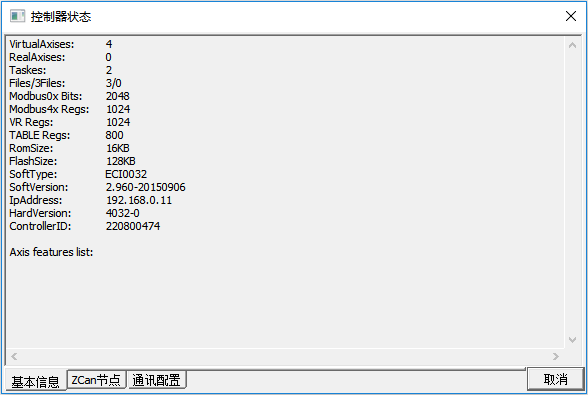
3.控制器基本信息
02 C#语言进行ECI IO卡的开发
(一)新建WinForm项目并添加函数库
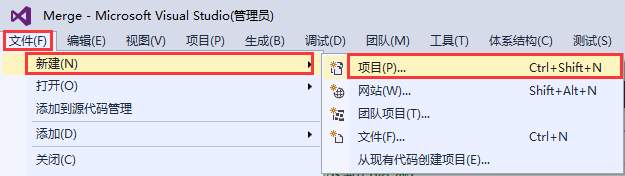
1.在VS2015菜单“文件”→“新建”→“项目”,启动创建项目向导。
2.选择开发语言为“Visual C#”和.NET Framework 4以及Windows窗体应用程序。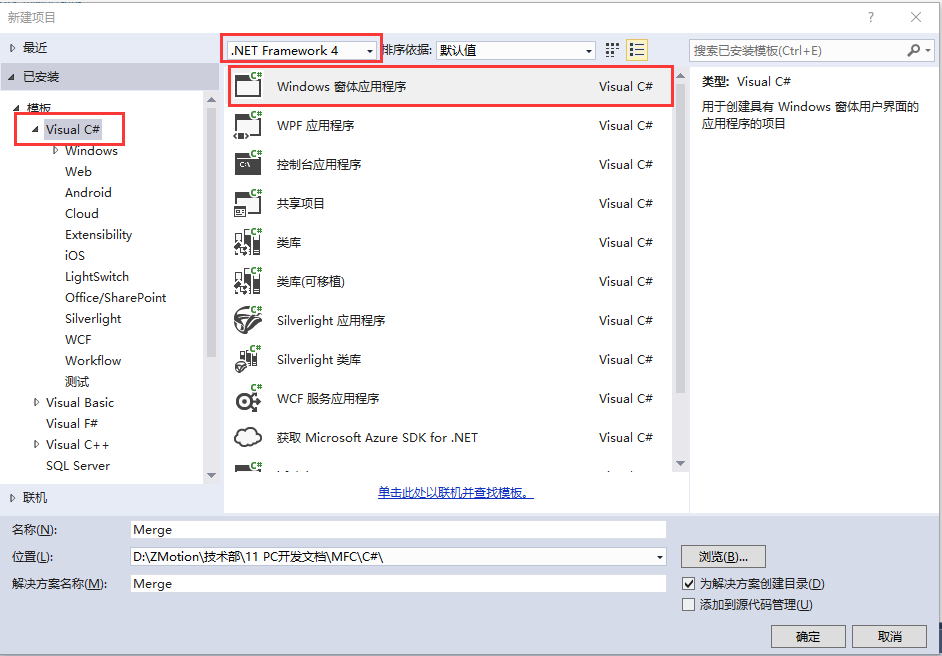
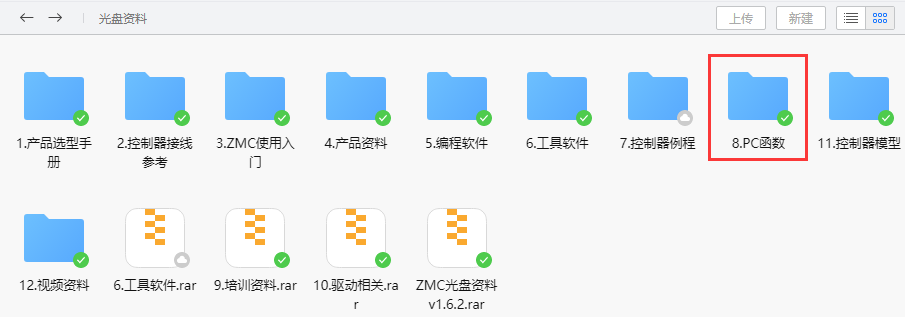
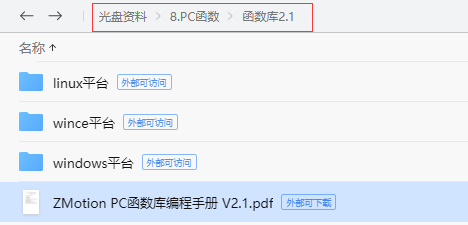
3.找到厂家提供的光盘资料里面的C#函数库,路径如下(64位库为例)。
1)进入厂商提供的光盘资料找到“8.PC函数”文件夹,并点击进入。
2)选择“函数库2.1”文件夹。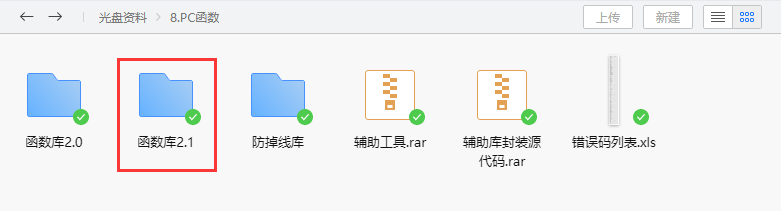
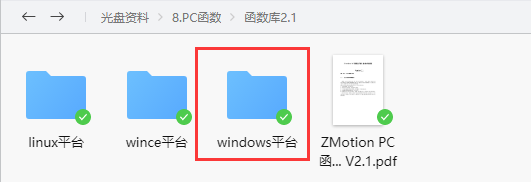
3)选择“Windows平台”文件夹。
4)根据需要选择对应的函数库,这里选择64位库。
5)解压C#压缩包,里面有C#对应的函数库。
6)函数库具体路径如下。
4.将厂商提供的C#的库文件以及相关文件复制到新建的项目中。
1)将zmcaux.cs文件复制到新建的项目里面中。
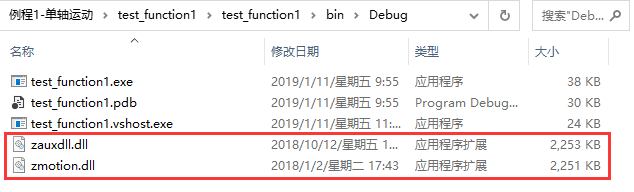
2)将zaux.dll和zmotion.dll文件放入bindebug文件夹中。
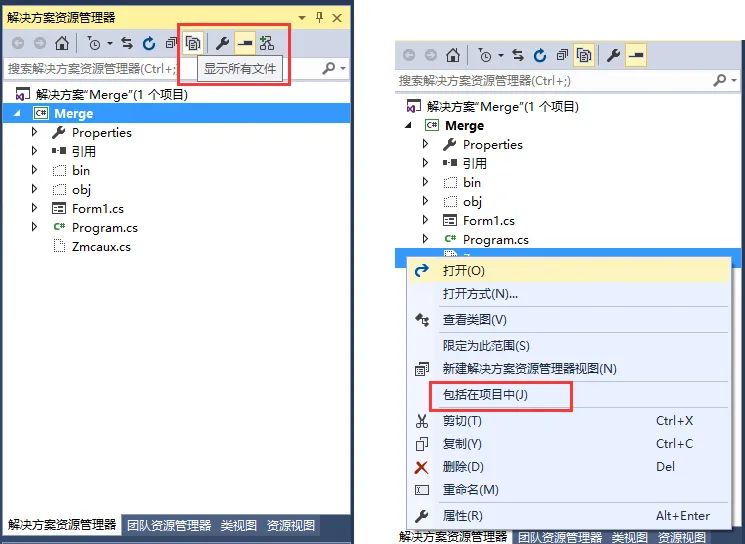
5.用vs打开新建的项目文件,在右边的解决方案资源管理器中点击显示所有文件,然后鼠标右击zmcaux.cs文件,点击包括在项目中。
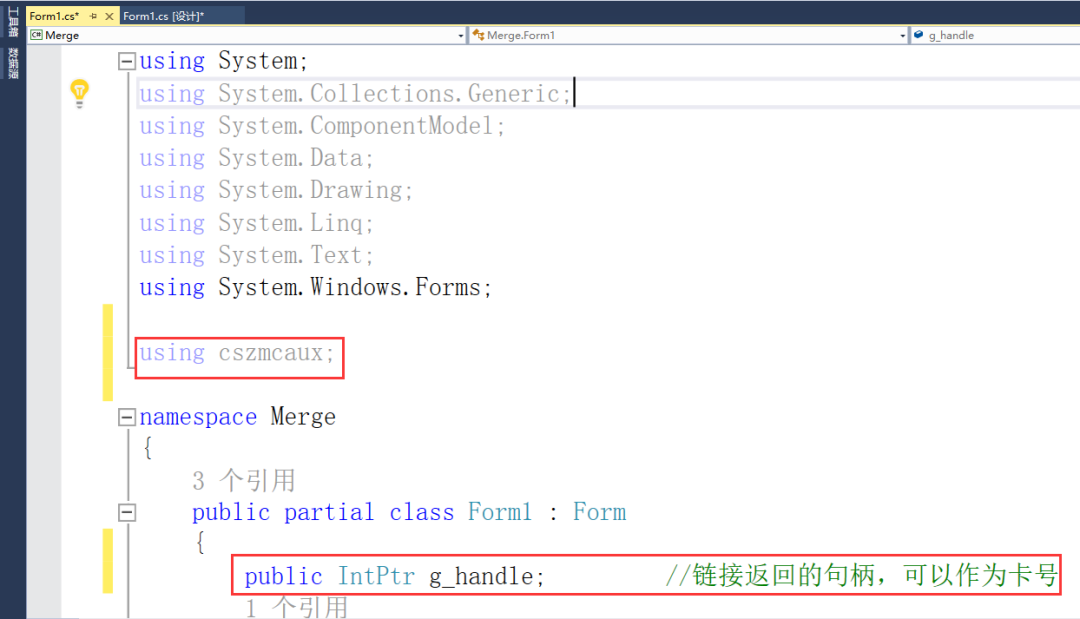
6.双击Form1.cs里面的Form1,出现代码编辑界面,在文件开头写入using cszmcaux,并声明控制器句柄g_handle。
7.至此,项目新建完成,可进行C#项目开发。
(二)PC函数介绍
1.PC函数手册可在光盘资料查看,具体路径如下。
2.链接控制器,获取链接句柄。
| 指令3 | ZAux_OpenEth | ||||
| 指令原型 | int32 __stdcall ZAux_OpenEth(char *ipaddr, ZMC_HANDLE * phandle) | ||||
| 指令说明 | 以太网连接控制器 | ||||
| 输入参数 |
|
||||
| 输出参数 |
|
||||
| 返回值 | 成功返回值为0,非0详见错误码说明 | ||||
| 指令示例 | 网口连接控制器 | ||||
| 详细说明 |
1.网口采用RJ45标准网线接口,通讯速率为100Mbit/s。 2.控制器出厂的IP地址为192.168.0.11,端口号为502。对端通讯设备需与控制器处于同一网段,才可进行连接。 3.最常用的控制器连接方式。 4.ZMC_HANDLE 类型:Zmotion库中,专门用于控制卡连接数据定义类型。 |
3.快速读取多个输入口当前状态接口说明。
| 指令200 | ZAux_GetModbusIn | ||||||||
| 指令原型 | int32 __stdcall ZAux_GetModbusIn (ZMC_HANDLE handle,int ionumfirst, int ionumend, uint8 * pValueList); | ||||||||
| 指令说明 | 快速读取多个当前的输入状态 | ||||||||
| 输入参数 |
|
||||||||
| 输出参数 |
|
||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明 | ||||||||
| 指令示例 | 多个IO读取 | ||||||||
| 详细说明 | Modbus方式获取出来的状态是未反转前的状态。如果有用INVERT_IN反转,读取的状态可能就是不对的 |
4.快速读取多个输出口当前状态接口说明。
| 指令201 | ZAux_GetModbusOut | ||||||||
| 指令原型 | int32 __stdcall ZAux_GetModbusOut (ZMC_HANDLE handle,int ionumfirst, int ionumend, uint8 * pValueList); | ||||||||
| 指令说明 | 快速读取多个当前的输出状态。Modbus方式获取出来的状态是未反转前的状态。如果有用INVERT_IN反转,读取的状态可能就是不对的 | ||||||||
| 输入参数 |
|
||||||||
| 输出参数 |
|
||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明 | ||||||||
| 指令示例 | 多个IO读取 | ||||||||
| 详细说明 | Modbus方式获取出来的状态是未反转前的状态。如果有用INVERT_IN反转,读取的状态可能就是不对的 |
03 C#快速读取多个IO状态测试例程
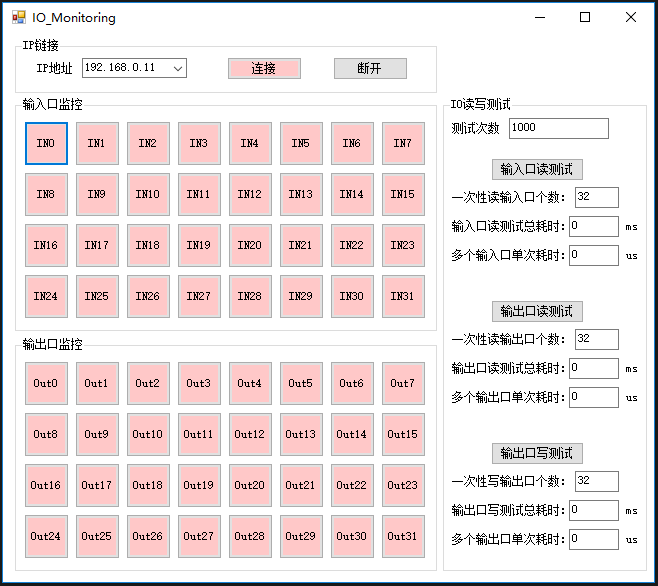
1.例程界面
2.相关代码
①链接按钮的事件处理函数中调用链接控制器的接口函数ZAux_OpenEth(),与控制器进行链接,链接成功后启动定时器1监控控制器的IO状态。
//链接控制器
private void LinkButton_Click(object sender, EventArgs e)
{
zmcaux.ZAux_OpenEth(IP_comboBox.Text, out g_handle);
if (g_handle != (IntPtr)0)
{
// MessageBox.Show("控制器链接成功!", "提示");
timer1.Enabled = true;
LinkButton.BackColor = Color.FromArgb(200, 255, 200);
}
else
{
MessageBox.Show("控制器链接失败,请检测IP地址!", "警告");
LinkButton.BackColor = Color.FromArgb(255, 200, 200);
}
}
②通过定时器1监控控制器的IO状态。
//定时器更新IO信息
private void timer1_Tick(object sender, EventArgs e)
{
int j, k;
int TestNum = 50;
//快速读取输入口状态接口时间测试
byte[] InState = new byte[4];
DateTime beforeDT = System.DateTime.Now;
for (int count = 0; count < TestNum; count++)
{
zmcaux.ZAux_GetModbusIn(g_handle, 0, 32, InState);
for (int i = 0; i < 32; i++)
{
j = i / 8;
k = i % 8;
if (((InState[j] >>k)&1)==1)
{
InStatus[i].BackColor=Color.FromArgb(200,255,200);
}
else
{
InStatus[i].BackColor=Color.FromArgb(255,200,200);
}
}
}
DateTimeafterDT=System.DateTime.Now;
//计算beforeDT与afterDT的时间差
TimeSpants=afterDT-beforeDT;
InMoitoring.Text="输入口监控_刷新时间:"+(ts.TotalMilliseconds*1000/TestNum).ToString()+"us";
//快速读取输出口状态接口时间测试
byte[]OutState=newbyte[4];
DateTimebeforeDTOP=System.DateTime.Now;
for(intcount=0;count< TestNum; count++)
{
zmcaux.ZAux_GetModbusOut(g_handle, 0, 32, OutState);
for (int i = 0; i < 32; i++)
{
j = i / 8;
k = i % 8;
if (((OutState[j] >>k)&1)==1)
{
OutStatus[i].BackColor=Color.FromArgb(200,255,200);
}
else
{
OutStatus[i].BackColor=Color.FromArgb(255,200,200);
}
}
}
DateTimeafterDTOP=System.DateTime.Now;
//计算beforeDTOP与afterDTOP的时间差
ts=afterDTOP-beforeDTOP;
OutMoitoring.Text="输出口监控_刷新时间:"+(ts.TotalMilliseconds*1000/TestNum).ToString()+"us";
}
③多个输入口状态读取速度测试函数。
//多个输入口状态读取交互速度测试 private void ReadInTest_Click(object sender, EventArgs e) { intj,k; inttestNum=Convert.ToInt32(TestNum.Text.ToString()); intreadInNum=Convert.ToInt32(ReadInNum.Text.ToString()); //快速读取输入口状态接口时间测试 byte[]InState=newbyte[4]; DateTimebeforeDT=System.DateTime.Now; for(intcount=0;count< testNum; count++) { zmcaux.ZAux_GetModbusIn(g_handle, 0, readInNum, InState); if (count % 100 == 0) { for (int i = 0; i < 32; i++) { j = i / 8; k = i % 8; if (((InState[j] >>k)&1)==1) { InStatus[i].BackColor=Color.FromArgb(200,255,200); } else { InStatus[i].BackColor=Color.FromArgb(255,200,200); } } } } DateTimeafterDT=System.DateTime.Now; //计算beforeDT与afterDT的时间差 TimeSpants=afterDT-beforeDT; //总耗时ms ReadInTotTime.Text=ts.TotalMilliseconds.ToString("0.00"); //平均耗时us ReadInTime.Text=(ts.TotalMilliseconds*1000/testNum).ToString("0.00"); }
④多个输出口状态读取速度测试函数。
//多个输出口状态读取交互速度测试
private void ReadOutTest_Click(object sender, EventArgs e)
{
int j, k;
inttestNum=Convert.ToInt32(TestNum.Text.ToString());
intreadOutNum=Convert.ToInt32(ReadOutNum.Text.ToString());
//快速读取输入口状态接口时间测试
byte[]OutState=newbyte[4];
DateTimebeforeDT=System.DateTime.Now;
for(intcount=0;count< testNum; count++)
{
zmcaux.ZAux_GetModbusOut(g_handle, 0, readOutNum, OutState);
if (count % 100 == 0)
{
for (int i = 0; i < 32; i++)
{
j = i / 8;
k = i % 8;
if (((OutState[j] >>k)&1)==1)
{
OutStatus[i].BackColor=Color.FromArgb(200,255,200);
}
else
{
OutStatus[i].BackColor=Color.FromArgb(255,200,200);
}
}
}
}
DateTimeafterDT=System.DateTime.Now;
//计算beforeDT与afterDT的时间差
TimeSpants=afterDT-beforeDT;
//总耗时ms
ReadOutTolTime.Text=ts.TotalMilliseconds.ToString("0.00");
//平均耗时us
ReadOutTime.Text=(ts.TotalMilliseconds*1000/testNum).ToString("0.00");
}
⑤多个输出口状态设置速度测试函数。
//多个输出口状态设置交互速度测试
private void WriteOutTest_Click(object sender, EventArgs e)
{
inttestNum=Convert.ToInt32(TestNum.Text.ToString());
intwriteOutNum=Convert.ToInt32(WriteOutNum.Text.ToString());
//快速读取输入口状态接口时间测试
byte[]OutState=newbyte[4];
DateTimebeforeDT=System.DateTime.Now;
for(intcount=0;count< testNum; count++)
{
zmcaux.ZAux_GetModbusOut(g_handle, 0, writeOutNum, OutState);
}
DateTime afterDT = System.DateTime.Now;
//计算beforeDT与afterDT的时间差
TimeSpan ts = afterDT - beforeDT;
//总耗时 ms
WriteOutTolTime.Text = ts.TotalMilliseconds.ToString("0.00");
//平均耗时 us
WriteOutTime.Text = (ts.TotalMilliseconds * 1000 / testNum).ToString("0.00");
}
3.多个IO状态与上位机交互速度测试结果
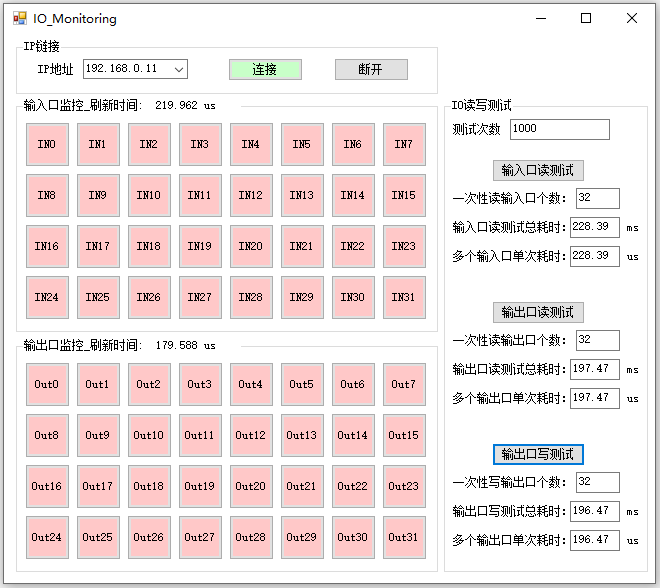
(1)32个输入输出口读写1000次,交互速度测试结果。
(2)32个输入输出口读写1W次,交互速度测试结果。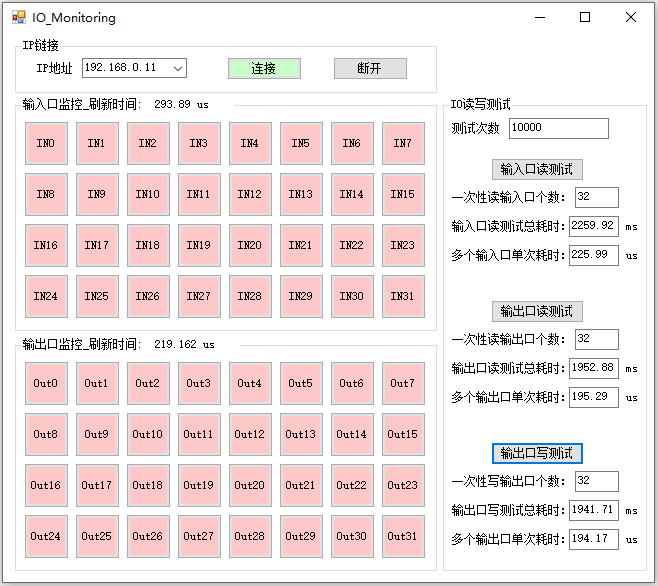
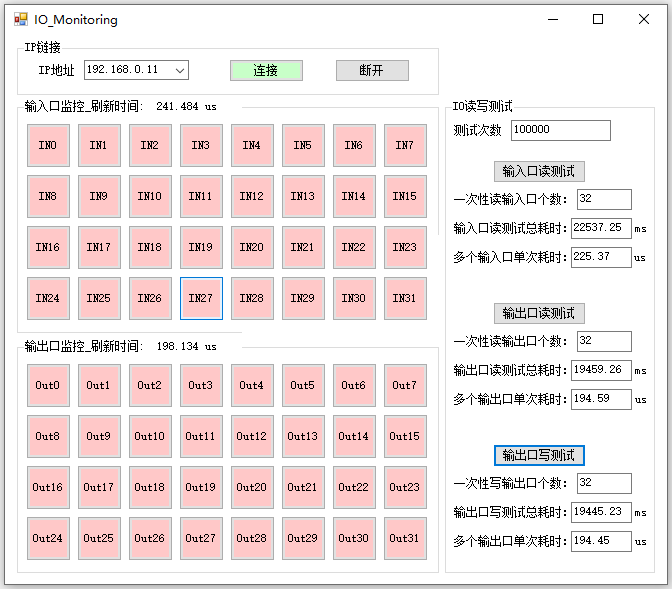
(3)32个输入输出口读写10W次,交互速度测试结果。
(4)32个输入输出口定时器实时交互的测试结果演示。
04 分析与结论
以上分别是对32个输入口的读速度、32个输出口的读速度以及32个输出口的写速度进行测试,从上面的运行效果图的数据显示来看,无论是输入口还是输出口,它们的交互速度都保持在200us左右。
当测试次数从1000次增加到1W次,甚至10W次时,交互速度依旧保持在200us左右。测试效果十分稳定。测试数据如下表所示:
| 测试次数 | 读32个输入口 | 读32个输出口 | 写32个输出口 |
| 1000 | 228.39us | 197.47us | 196.47us |
| 10000 | 225.99us | 195.29us | 194.17us |
| 100000 | 225.37us | 194.59us | 194.45us |
审核编辑:刘清
-
以太网
+关注
关注
40文章
5431浏览量
171876 -
CAN总线
+关注
关注
145文章
1952浏览量
130824 -
RS232接口
+关注
关注
0文章
85浏览量
20558 -
运动控制卡
+关注
关注
7文章
113浏览量
15471
原文标题:简单易用的以太网IO控制卡:C#读写测试
文章出处:【微信号:伺服与运动控制,微信公众号:伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论