 HFAN-04.0.2:在指定BER下在RMS和峰峰值抖动之间进行转换
HFAN-04.0.2:在指定BER下在RMS和峰峰值抖动之间进行转换
有几种方法可以定量说明系统内的随机抖动量。讨论涉及两种公约之间的差异。第一种方法是给出抖动分布的标准偏差(或等效的RMS值)。第二种方法是选择误码率(BER)阈值,并将随机抖动定义为峰峰值。本应用笔记为RMS抖动和峰峰值抖动测量之间的转换提供了数学基础。
介绍
有几种方法可以定量陈述 系统内的随机抖动量。这 以下讨论解决了差异 在两个约定之间。第一种方法是给 抖动分布的标准偏差(或 等效于 RMS 值)和第二种方法 是选择误码率 (BER) 阈值和 将随机抖动定义为峰峰值。
电压噪声与时间噪声的关系
抖动本质上是过零的变化 数据眼的时代。噪音有两种方式 可能会导致系统中出现位错误。一种方式发生 当噪声导致数据波形下降时 采样时低于决策阈值电压 实例(电压噪声)。噪音也会导致错误 通过诱导抖动(定时噪声)。抖动导致错误 在系统中,通过移动数据眼 垂直采样实例。
RMS 到峰峰值抖动转换
在 RMS 和峰峰值随机之间进行转换 抖动时,必须指定 BER。以下 方程可用于在两者之间进行转换:
抖动P-P= α * 抖动有效值
和
| 误码率 | α |
| 10-3 | 6.180 |
| 10-4 | 7.438 |
| 10-5 | 8.530 |
| 10-6 | 9.507 |
| 10-7 | 10.399 |
| 10-8 | 11.224 |
| 10-9 | 11.996 |
| 10-10 | 12.723 |
| 10-11 | 13.412 |
| 10-12 | 14.069 |
| 10-13 | 14.698 |
| 10-14 | 15.301 |
| 10-15 | 15.883 |
| 10-16 | 16.444 |
峰峰值抖动与RMS抖动的关系
高斯分布描述随机抖动。 定性分析表明,尾巴 高斯分布在任一上无限扩展 均值的一侧。因此,不可能 指定一个峰峰值抖动范围,该范围限定为 抖动 100% 的时间。相反,我们想要确定一个包含抖动的范围,例如, 99.99999% 的时间。这意味着 0.00001% 的抖动将超出我们的峰峰值范围。计算峰峰值抖动为 对于抖动预算分析很重要。假设 任何落在峰峰值之外的样品 范围将导致错误。因此,如果 BER 目标 选择10-12,需要选择一个范围 将包含除 0.0000000001% 以外的所有抖动 时间。
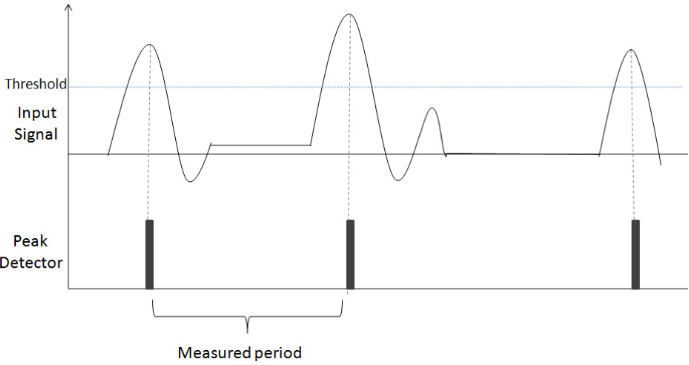
峰峰值抖动和示波器 测量
在直方图模式下使用示波器时 测量随机抖动,通常测得的峰峰值抖动几乎没有实际价值。最 示波器生成峰峰值 简单地找到两者之间的时差 直方图中捕获的最远点。因为 该测量取决于许多 因素,包括采集的样本数量,它 不是统计上有效的品质因数 指定峰峰值抖动。
更多关于 高斯统计
量化随机抖动的假设是 它近似于高斯分布。 通常,当主要来源 系统中的噪声是热噪声。在实践中,这 似乎是有效的。另一方面,确定性 或模式相关的抖动绝对不是高斯 在自然界中。
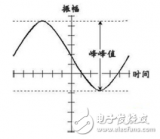
统计学教科书告诉我们高斯分布 可以完全由两个参数定义:平均值 和标准差。分布的均值 确定水平位置并取决于 在选定的参考框架上。在此 讨论,数据眼的理想边缘设置为: t = 0。图1是高斯概率图 密度函数 (PDF)。PDF 是一种表示形式 事件发生在某个事件的概率 时间。在此示例中,它显示了如何交叉零点 的数据将相对于理想位置移动 (在 x 轴上设置为 0)。PDF的一个基本属性是它包含的区域(或其积分)是 等于 1。
图 1 还显示了高斯分布 可以限制为包含百分比 (<100%) 样品。尾巴下方的区域代表 数据边缘已移出的区域 边界限制。
假设样本发生在 边界限制会导致错误,那么一旦 交叉在采样实例中移动, 误差概率为 50%,假设不相关 具有 50% 跃迁密度的数据。概率 误差 (Pe) 可以计算为:
因为高斯分布是对称的 横跨 t = 0:
我们可以将 Pe 简化为:
概率密度函数描述如下:
其中σ是标准差(RMS 值) 抖动和 m 是平均值。
如果我们让 m = 0,我们可以找到阴影的面积 通过整合区域:
因为上述不存在封闭式解决方案 整体,需要进一步简化。数学 显示上述等式解的表格是 常见于 σ = 1 的情况。我们可以规范化 通过更改变量来σ = 1:
随着变量的这种变化,集成现在是 以通常称为补充的形式 错误函数。现在如果标准差 (或RMS值)的噪声是已知的,误码率为 可以使用 互补误差功能:
erfc 函数在许多数学中被制成表格 引用以及作为 Excel 中的函数和 马特拉布。 例如,可以找到峰峰值抖动 误码率 = 10 时-10当有效值抖动为 5ps 时。 参考一个 erfc 表,我们发现 10-10= 1⁄2 * erfc(12.723/(2*√2))。该示例显示 那:
抖动P-P= α * 抖动有效值
答案是抖动P-P= 12.723*5ps = 63.61ps。
审核编辑:郭婷
-
噪音
+关注
关注
1文章
170浏览量
24049 -
RMS
+关注
关注
2文章
145浏览量
36218
发布评论请先 登录
相关推荐
labview寻找峰峰值
信号峰峰值测量
相位噪声的RMS抖动
是否可以使用DSO81304B示波器进行集成范围的RMS相位抖动测量?
峰峰值杂音测量方法介绍
峰峰值定义_示波器峰峰值怎么看
峰峰值频率监测





 工商网监
工商网监
评论