 RX72N CAN通信收发教程
RX72N CAN通信收发教程
介绍
CAN总线是德国BOSCH公司从80年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维。通信速率最高可达1Mbps。
1
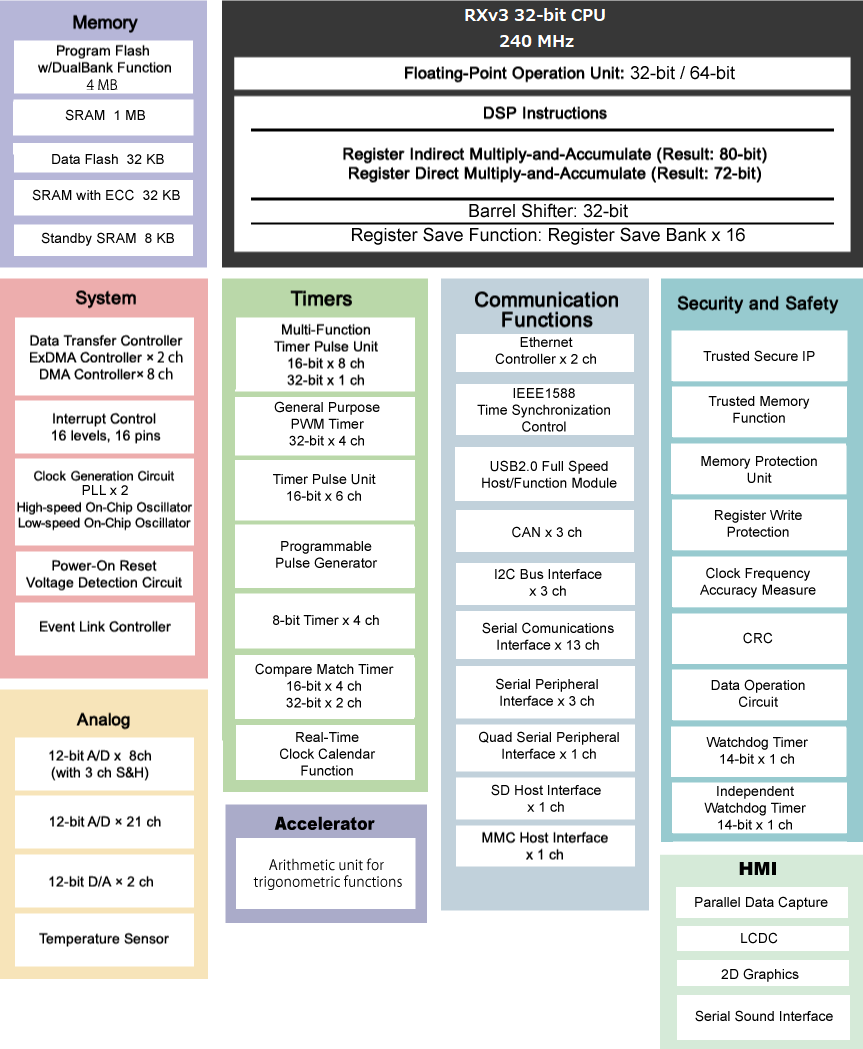
RX72N系列微控制器是一种高性能产品,工作频率为240MHz,配备了RX第三代RXv3 CPU内核。该产品凭借可在120MHz频率下读取数据的4MB闪存、1MB的SRAM和182个通用I/O端口,能够在单个芯片上实现实时设备控制和网络功能。它还涵盖了工业和消费类设备所需的HMI和安全性之类功能,有助于缩小外壳尺寸和缩短开发周期。
#01
RX72N芯片基本参数如下
1
240MHz操作RXv3内核、双精度FPU、加快中断响应的存储器批量保存功能
2
4MB闪存(120MHz读取访问、双库功能)、1MB SRAM
3
182个通用I/O端口
4
2通道以太网、SD主机I/F、USB 2.0全速、3通道CAN、QSPI
5
三角函数运算器(sin、cos、arctan、hypot)加快了电机的矢量控制
6
TFT LCD控制器、2D绘图引擎、串行声音I/F、CMOS相机I/F
7
加密引擎(AES、3DES、RSA、ECC、SHA、TRNG)、密钥管理、闪存保护功能
8
2.7V至3.6V工作单电源
9
工作环境温度 -40至85℃/-40至105℃
系统功能框图
#02
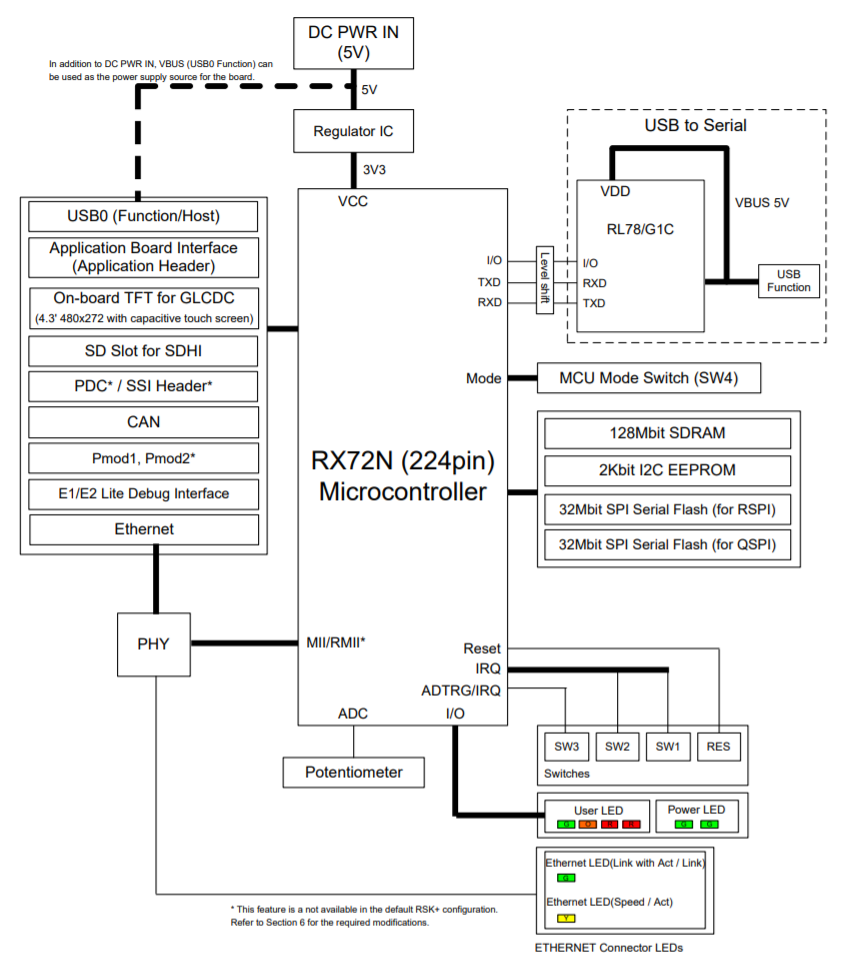
开发板系统框图如下图所示,因为只涉及到CAN功能,后面重点讲解CAN功能的使用。
1
主要使用CAN功能,开发板使用的CAN收发器芯片采用R2A25416SP,查阅芯片数据手册硬件原理图上配置好相关的硬件,注意120欧姆终端电阻,作用是提高抗干扰能力,让高频低能量的信号迅速走掉,确保总线快速进入隐性状态,让寄生电容的能量更快走掉;提高信号质量,放置在总线的两端,让反射能量降低。
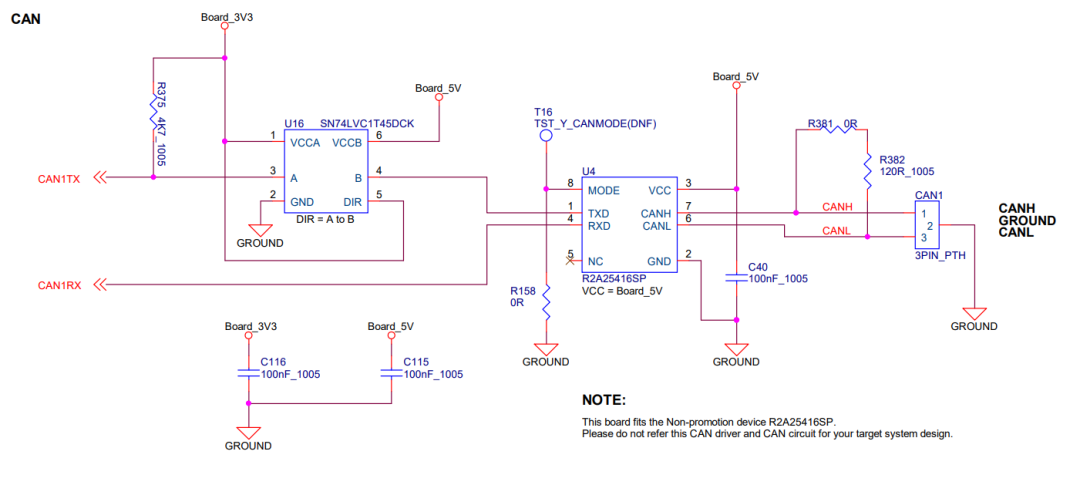
CAN功能原理图
2
图形化配置CAN的相关功能
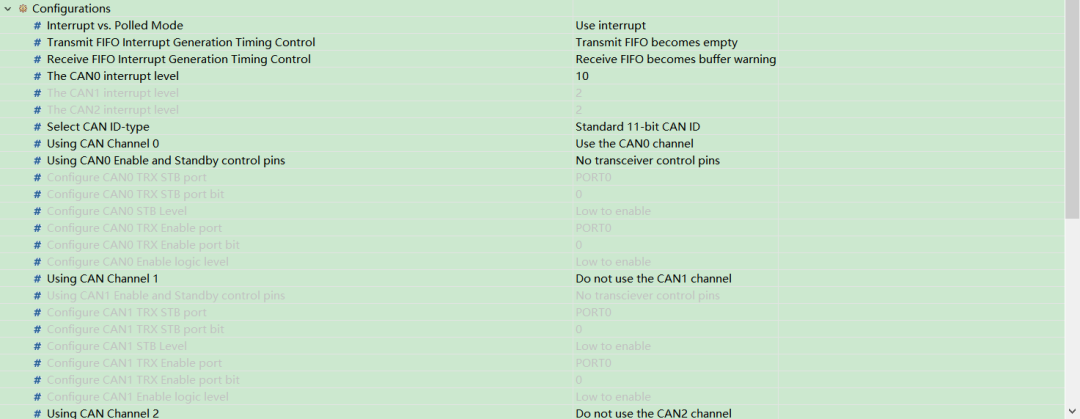
FIT库软件配置
2
软件配置完成后,就可以编写软件代码程序,编写代码的流程,基本就是创建CAN的基本参数、回调函数、使能通信引脚、开始收发处理等。
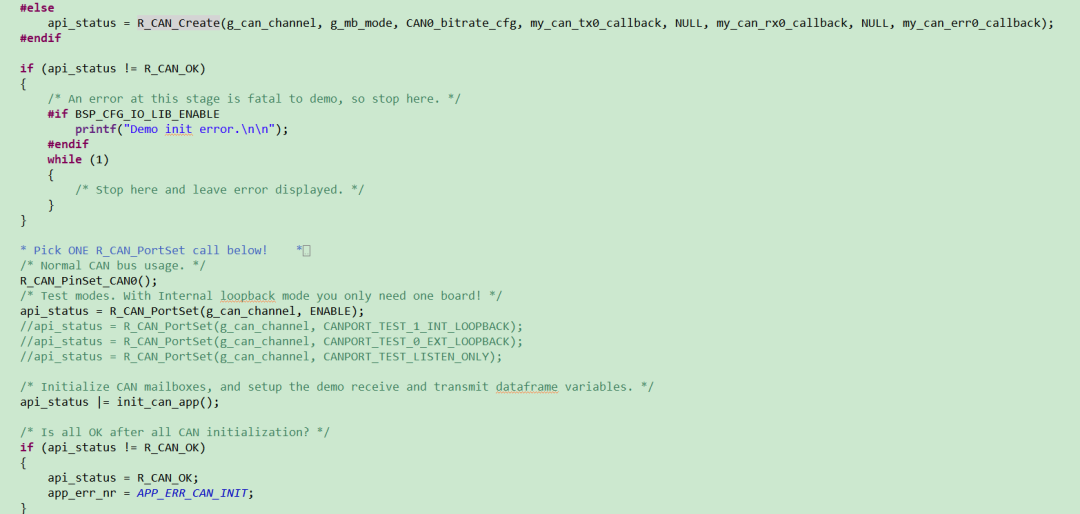
1
基本操作代码
逻辑代码
2
处理逻辑,中断收发数据,进入FIFO操作
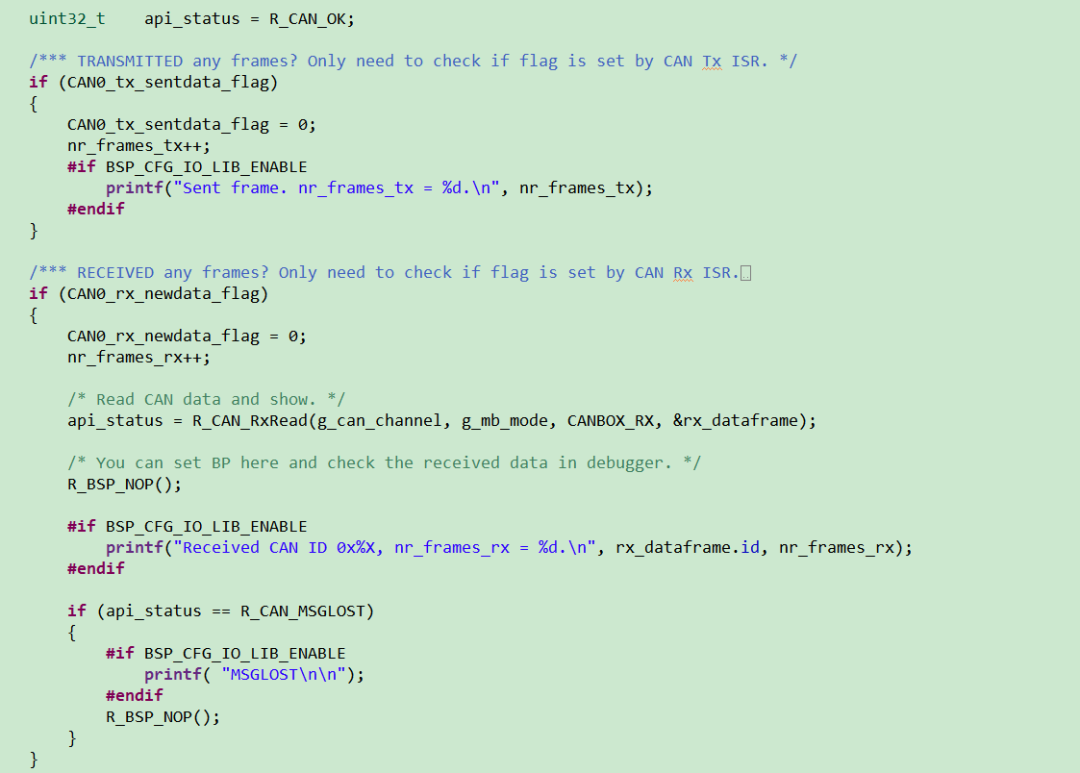
逻辑代码
3
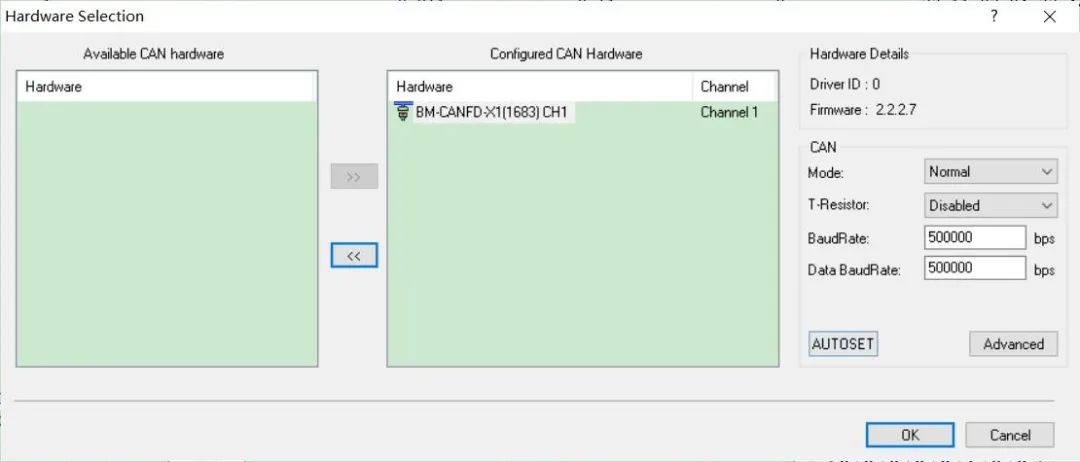
上位机界面
4
设置上位机需要与设备通信的数据
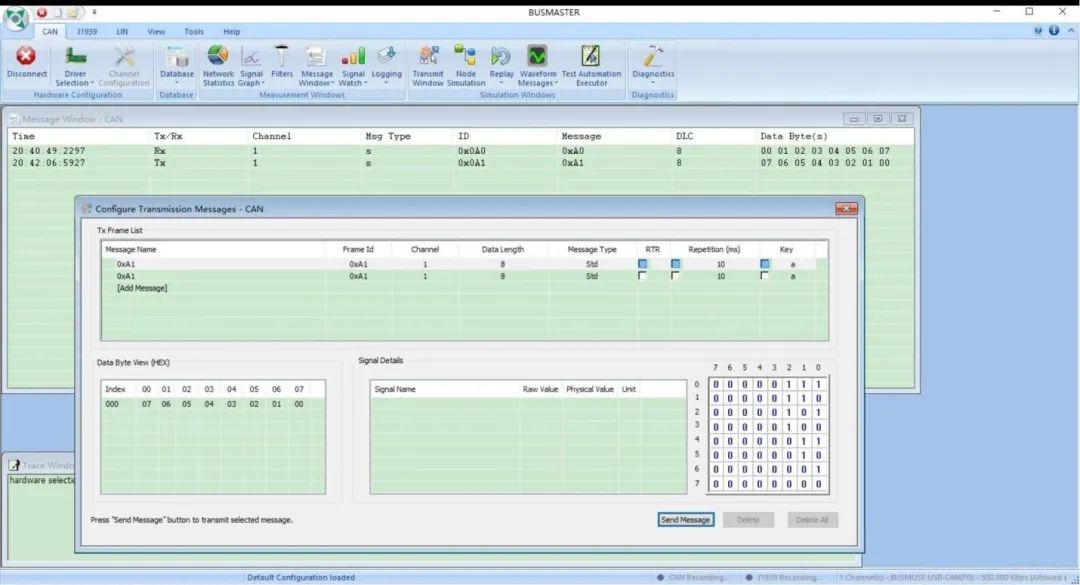
上位机界面
5
Debug调试程序观察寄存器收到的数据
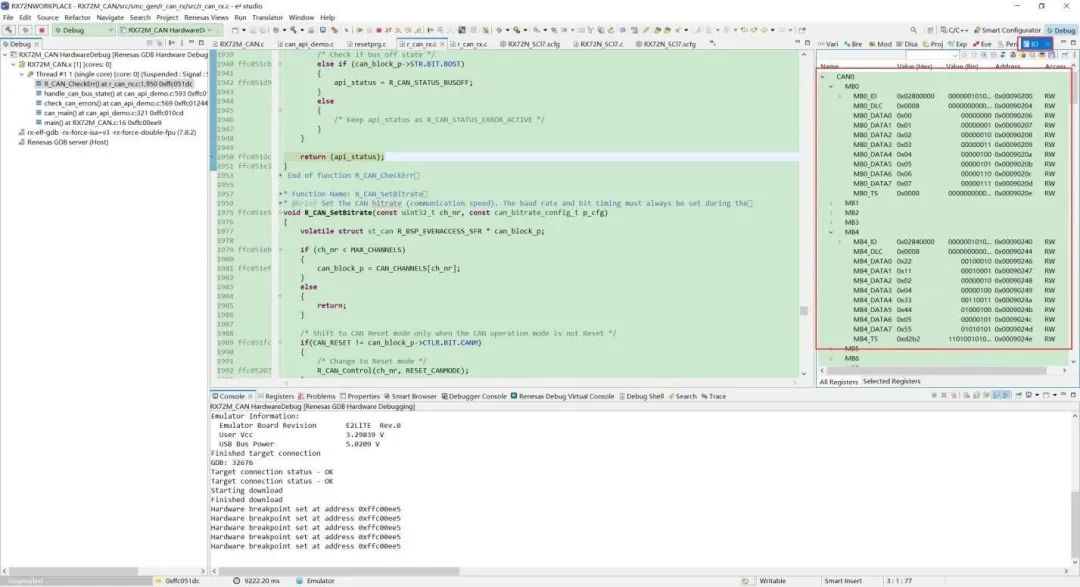
调试界面
6
CAN的波计算特率公式和相关参数的设置
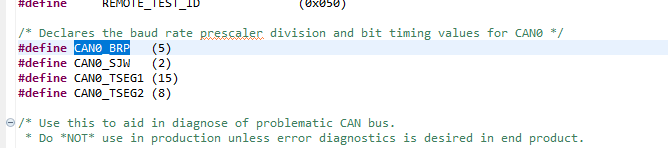

CAN波特率设置代码
结论
CAN总线通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等工作。CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码。采用这种方法的优点可使网络内的节点个数在理论上不受限制,数据块的标识符可由11位或29位二进制数组成,因此可以定义2或2个以上不同的数据块,这种按数据块编码的方式,还可使不同的节点同时接收到相同的数据,这一点在分布式控制系统中非常有用。
原文标题:RX72N CAN通信收发教程
文章出处:【微信公众号:瑞萨MCU小百科】欢迎添加关注!文章转载请注明出处。
-
mcu
+关注
关注
146文章
17529浏览量
355369 -
瑞萨
+关注
关注
36文章
22329浏览量
87268
原文标题:RX72N CAN通信收发教程
文章出处:【微信号:瑞萨MCU小百科,微信公众号:瑞萨MCU小百科】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
MHMF082L72N-MINAS A6BN 系列 技术资料 -EtherCAT 通信规格篇- 松下

MHMF082L72N-MINAS A6BU 系列 技术资料 -EtherCAT 通信规格篇- 松下
MHMF082L72N-MINAS A6N系列 (RTEX) 技术资料 -RTEX通信规格篇- 松下
MHMF042L72N-MINAS A6BU 系列 技术资料 -EtherCAT 通信规格篇- 松下
MHMF042L72N-MINAS A6N系列 (RTEX) 技术资料 -RTEX通信规格篇- 松下
MHMF041L72N-MINAS A6N系列 (RTEX) 技术资料 -RTEX通信规格篇- 松下
CAN总线收发器的工作原理和应用
MHMF022L72N-MINAS A6N系列 (RTEX) 技术资料 -RTEX通信规格篇- 松下
MHMF021L72N-MINAS A6N系列 (RTEX) 技术资料 -RTEX通信规格篇- 松下
MHMF012L72N-MINAS A6N系列 (RTEX) 技术资料 -RTEX通信规格篇- 松下
MHMF011L72N-MINAS A6N系列 (RTEX) 技术资料 -RTEX通信规格篇- 松下





 工商网监
工商网监
评论