 介绍一下KUKAC2机器人关于INTERBUS PCI卡进行主从配置的文件
介绍一下KUKAC2机器人关于INTERBUS PCI卡进行主从配置的文件
前言:
Interbus现场总线是KUKAC2机器人最常用的总线系统。它以简洁,快速方便的控制特点,在整个大众公司的焊装车间曾经广泛使用!尤其是在VASS标准和PROFINET网络广泛推广之前,成为 KUKAC2机器人和PLC的表配,下面我们来介绍一下KUKAC2机器人关于INTERBUS PCI卡进行主从配置的文件。
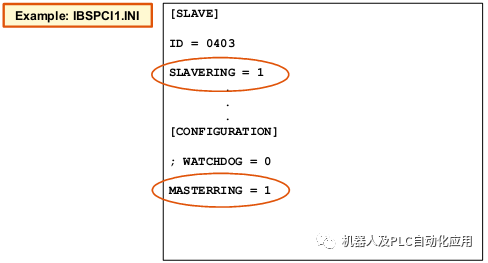
界面选项:主-从
接口选项,KRC是主从设备(1)
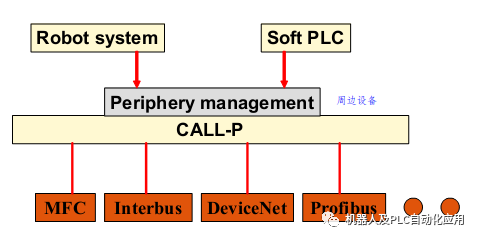
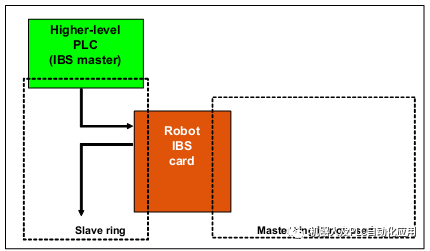
上级PLC(IBS主站)-机器人IBS卡-
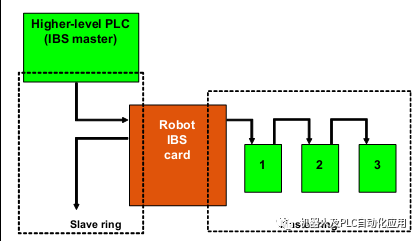
机器人作为Interbus设备
根据其系统环境,KRC机器人可以在过程数据通信方面扮演各种角色。
在最简单的情况下,机器人与其他I / O模块一样,与作为从站的更高级别的主站(例如单元或线路PLC)交换过程数据。
但是,机器人本身可以作为主机来控制过程通讯,其中执行器和传感器仅作为从机参与。
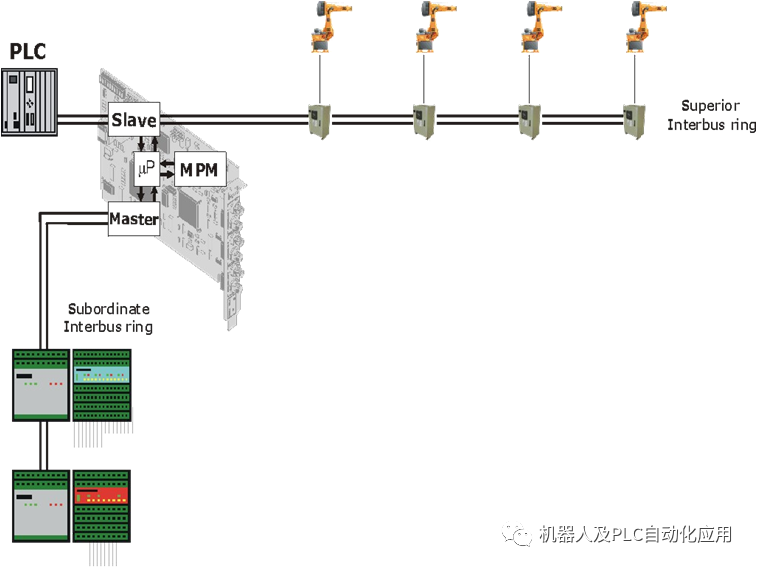
在大型生产系统中,传送带,生产单元和大型机器构成不同的层次级别,其中某些控制器充当这些生产级别之间的中介。
机器人控制器通常执行此功能,例如在焊接和装配线中。
上图中示意性地显示了机器人的这种中间角色。在更高级别的从属环中,机器人作为从属与更高级别的控制器通信,该控制器协调整个系统,包括其输送机系统以及可能的多个机器人。在较低级别的主环中,机器人控制其工具并从其过程环境接收信号。
本节介绍的所有Interbus控制器板均支持上述所有三个角色。主连接和从连接彼此独立运行,即,每一侧都有自己的过程数据区。但是,两个通信级别可以通过配置更紧密地耦合。
PCI卡 我们现在使用卡
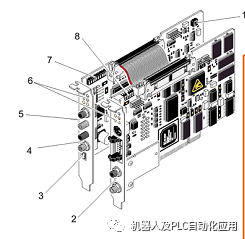
1.重置按钮(从动)
2.主接口(远程输出,传出远程总线)
4.从站接口(远程输出,传出远程总线)
5.从接口(远程输入,传入的远程总线)
6.指示器元件(LED)
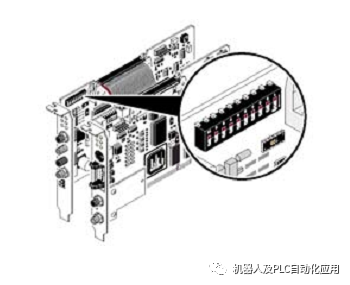
7.用于从站配置的DIP开关
8.用于主配置的DIP开关
该卡是ISA系统耦合器的基于PCI的重新开发。因此,该卡的性能类似于IBS ISA SC / RI / RT-LK。主要区别在于将Interbus主控和从属部件分离到通过连接电缆相互链接的两个不同的卡上。
Interbus主卡包含系统耦合器的PCI连接,该卡用于与PC进行通信。该卡可以安装在PC中任何可用的PCI插槽中。
Interbus从卡具有一个PCI端子排,其唯一目的是能够将该卡连接到PCI插槽以及前面板。该PC I端子排也可以在预定的断裂点处折断。也可以将卡拧在一起。
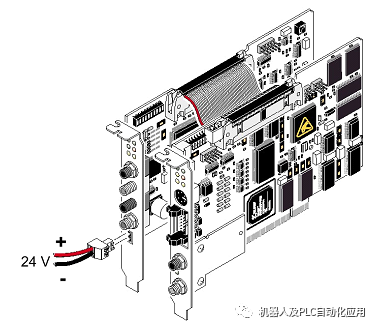
外接电源
为了操作控制板,还必须为从扩展模块提供外部24 V DC电源电压。该电源电压通过2针MINI-COMBICON连接器连接。
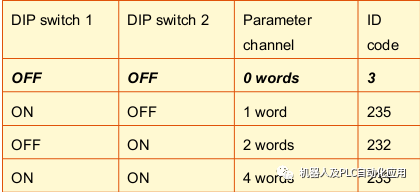
1-2通讯参数的频道
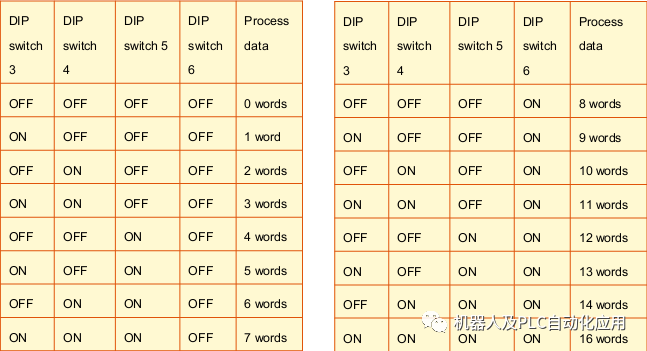
3-6 通讯位数
7:重置主机PC DIP开关7时的重置响应用于确定下级主系统的重置是否触发上级系统中的外围故障。如果开关设置为“ OFF”,则不会有任何消息发送到上级系统。在“ ON”位置,将触发一条消息,以便更高级别的系统可以做出反应。
8: 重新配置请求DIP开关8用于启用通过OPC总线端子进行的重新配置请求。该机构在“ OFF”位置被禁用。
9:设置从机部分的波特率OFF = 500kBaud,ON 2000kBaud。
10: 组态,DIP开关10特别重要。如果它处于“ ON”位置,则根据DIP开关1至9的设置来配置控制板的从属部分。如果它处于“ OFF”位置,则将忽略开关设置1至9,并且将 从组件是根据已经驻留在系统中或从较低级别的主机接收的配置执行的。
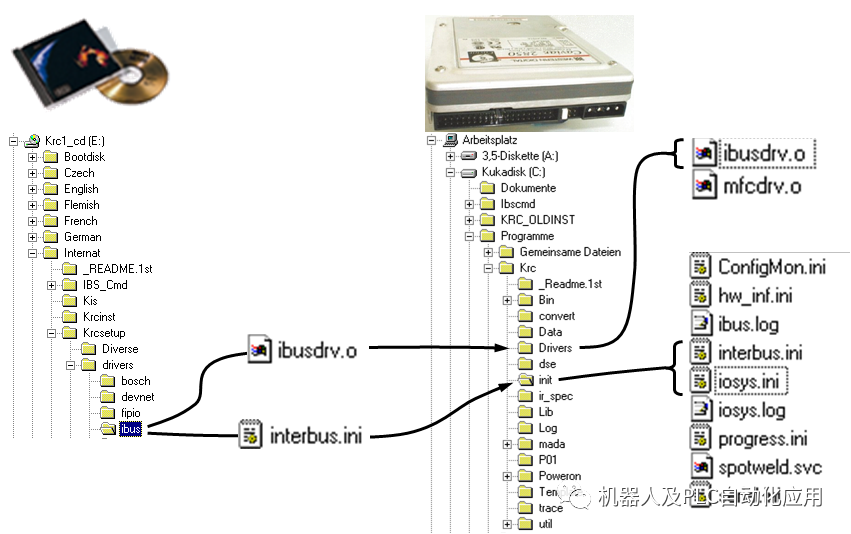
主目录
与操作相关的KRC控制器的所有文件和目录都位于此
目录或其子目录中。在配置文件中,指定相对于主目录的路径,即
只需省略与主目录相对应的绝对路径规范部分即可。
INIT目录
该目录包含配置Interbus连接时需要检查和修改的最重要文件。I / O系统和Internet总线驱动程序都希望在此目录中找到其配置文件。
LOG目录
控制器的各个部分在此目录中生成文件,以记录其系统消息。
I / O系统还在此处存储有关上次重新引导的信息。Interbus驱动程序还可以生成日志文件,使用户可以自己确定驱动程序日志文件的目录。
DRIVERS目录
附加驱动程序(例如Interbus驱动程序)的程序必须位于DRIVERS子目录中。否则,驱动程序将无法由I / O系统激活。
PCI cards :
• C:...INITIOSYS.INI: I / O系统的配置文件
IOSYS.INI
由于其在将外围设备连接到机械手方面的核心作用,因此I / O系统的此配置文件始终安装在主分区上。
PCI card:
• C:...INITIBSPCI1.INI: Interbus驱动程序的参数化文件
INTERBUS.INI
INTERBUS.INI文件位于控制器的Init直接目录中。它包含Interbus ISA卡的参数化数据。
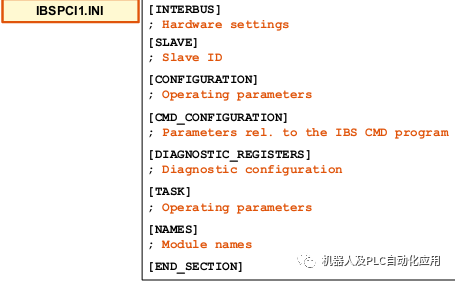
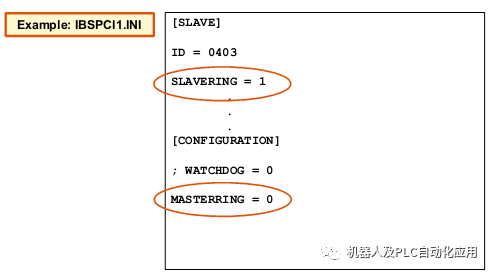
IBSPCI1.INI
文件IBSPCI1.INI位于控制器的Init目录中。它包含Interbus PCI卡的参数化数据。
• C:...DRIVERSIBPCIDRV.O: 所有Interbus PCI卡的驱动程序
IBSPCIDRV.O
该文件包含所有Interbus PCI卡的驱动程序。
接口选项,KRC为主机和从机(2)
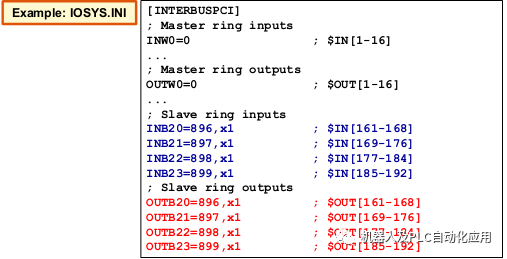
配置文件IOSYS.INI
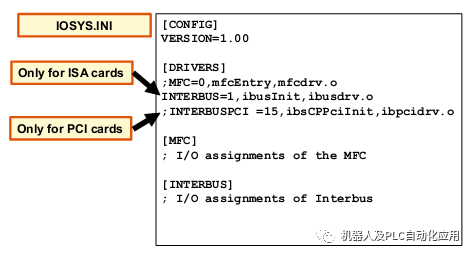
[CONFIG]
VERSION=1.00
[DRIVERS]
INTERBUSPCI=15,ibsCPPciInit,ibpcidrv.o 激活interbusPCI卡的使用
PROCONOS=100,pcosInit,pcosdrv.o 内部软PLC软件激活
激活INTERBUS驱动程序
通过配置文件IOSYS.INI的[DRIVERS]部分中以下形式的条目来激活INTERBUS驱动程序:
Section name= Index,ibusInit,ibusdrv.o
Section name
段名称必须与包含用于Interbus连接的I / O分配的部分的名称一致。因此,在发货时,IOSYS.INI文件始终包含一个Interbus节。
Index指数
索引是介于0到16之间的数字,但是目前没有意义。但是,使用的索引一定不能是已经使用的索引。PCI卡必须使用15。
ibsCPPciInit
接下来是INTERBUS驱动程序启动功能的名称。这是区分大小写的,必须如上所示准确输入。
ibpcidrv.o
ibusdrv.o是Interbus驱动程序的文件名。当启动I / O系统时,系统将在 drivers目录中查找该文件,然后将其加载到控制器r中,然后调用start函数。Interbus驱动程序支持所有三张Interbus ISA卡,这在本节涵盖Interbus控制器板的本节中已有介绍。
KRC控制器标配1024个输入和输出。通过修改文件$ Option.dat,可以将输入和输出增加到4096。INT $SET_IO_SIZE=2 ;存放 EA区(1=1024, 2=2048, 4=4096)
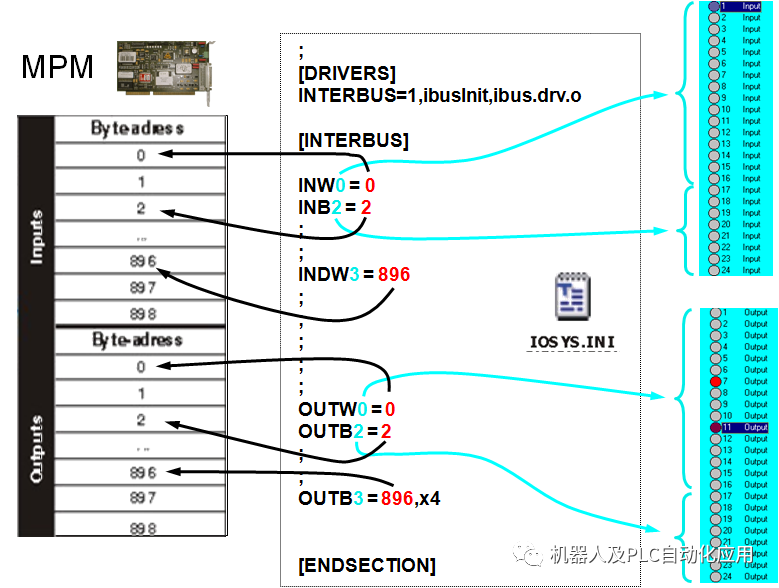
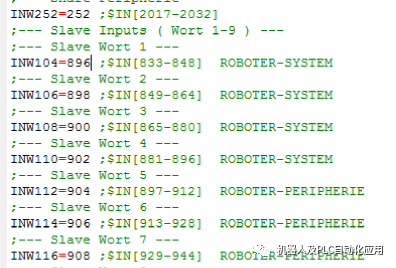
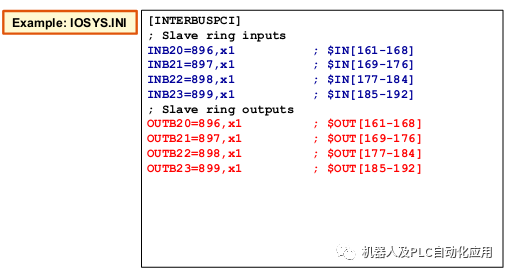
如果要访问从属接口的数据,则必须在Interbus侧使用偏移量896或更大的值。
例如奥迪标准中是从833开始的:
PLC与机器人的IO点从833开始
;--- Slave Wort 1 ---
INW104=896 ;$IN[833-848] ROBOTER-SYSTEM 104*8=832起始位833
;--- Slave Wort 2 ---
INW106=898 ;$IN[849-864] ROBOTER-SYSTEM
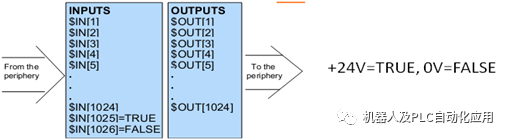
-PLC上的输出是机器人上的输入。
-PLC上的输入是机器人上的输出。
接口选项,KRC为主机和从机(3)
ID=09EB ;重板ID-16进制
09:位置1&2:过程数据长度字(16位), EB:位置3&4:作为总线设备的行为
SLAVERING=1 使用从板功能
WATCHDOG=1 看门狗功能
MASTERRING=1 使用主版(已连接I-Bus模块)
[INTERBUS]这主要是用来通知驱动程序在控制器板上进行的硬件设置。
[SLAVE]该部分影响Interbus控制器板从属部分的行为。
[CONFIGURATION]在此设置Interbus控制器板常规操作方法的各种参数。
[CMD_CONFIGURATION]此处,将Interbus卡设置为使用程序IBS CMD的任务。
[DIAGNOSTIC_REGISTERS]这些参数可以通过I / O系统的过程数据映像(无CMD配置)访问卡的内部诊断寄存器。
[TASK]此部分可用于控制驱动程序的独立性。
[NAMES] 通过在此处为Interbus网段和模块分配名称,可以使您的系统更加用户友好,例如,发生错误时,此处存储的文本将显示在GUI的消息窗口中。
KRC仅是从站
只设置了从卡
审核编辑:刘清
-
plc
+关注
关注
5012文章
13309浏览量
463732 -
电源电压
+关注
关注
2文章
989浏览量
24002 -
Profinet
+关注
关注
6文章
1193浏览量
23431 -
KUKA机器人
+关注
关注
4文章
143浏览量
9086
原文标题:KUKA C2机器人Interbus界面选项的(主-从)详解
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
什么是工业机器人
【卡酷机器人】试用一:套件拆箱
玩偶秒变机器人:机器人皮了解一下?
机器人、协作机器人和移动机器人,你分的清楚吗
桁架机器人核心配件介绍
使用旅游机器人需要注意哪些问题?
机器人Python仿真软件介绍
主从异构手术机器人的运动误差如何进行分析
KUKAC2机器人程序备份更改路径






 工商网监
工商网监
评论