 拆卸KUKA机器人2轴平衡配重详解
拆卸KUKA机器人2轴平衡配重详解
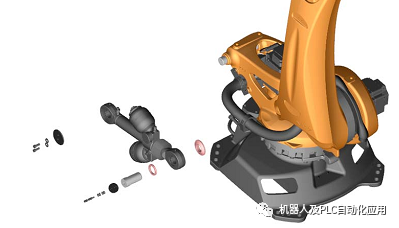
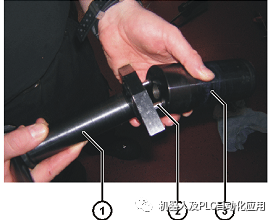
1.沿正向移动机器人,使间隔块落位于活塞杆上。
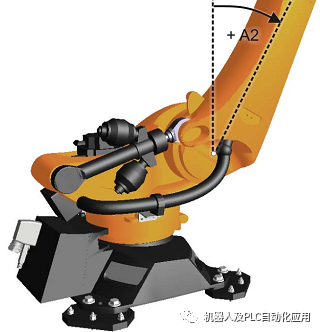
2. 将间隔块置于鱼眼接头与液压缸之间敞露的活塞杆上,为此,将橡胶波纹管往后推。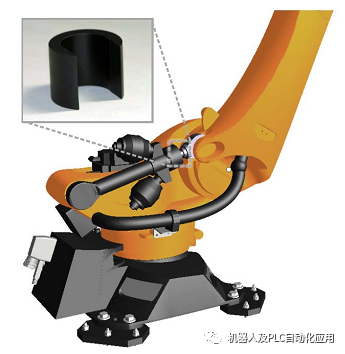

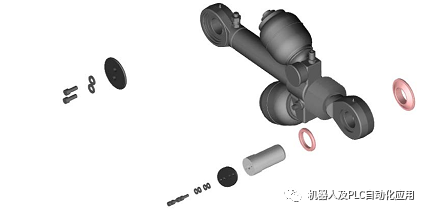
1.波纹管
2.蜗杆传动夹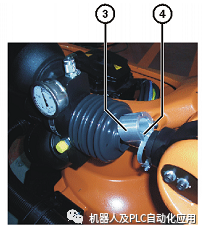
3夹紧衬套4活塞杆
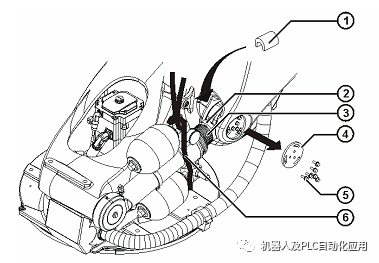
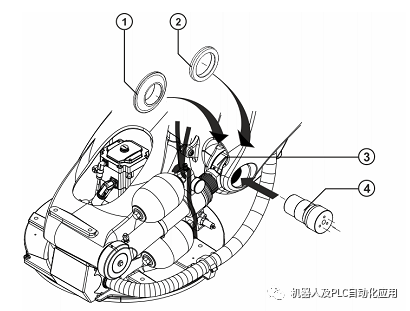
1.垫片
2.蜗杆传动夹
3.波纹管
4.锁紧垫圈
5.内六角螺钉
6.吊索
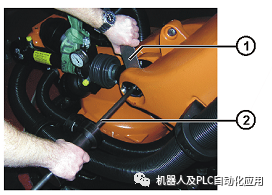
3. 将大臂小心地往负向移动,直到间隔块直着固定好。
4. 用合适的设备 (如起重机)固定平衡配重。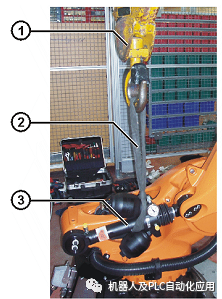
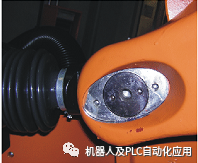
5. 拧出四个内六角螺栓及碟形垫圈,并取下止动垫圈。使用拔销器,将螺栓从大臂中拔出.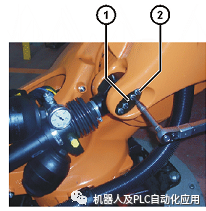

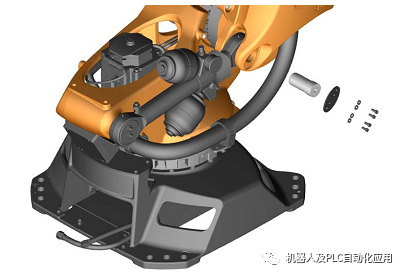
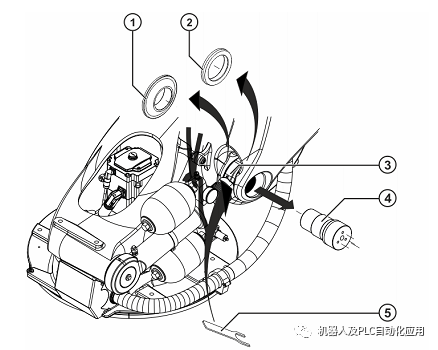
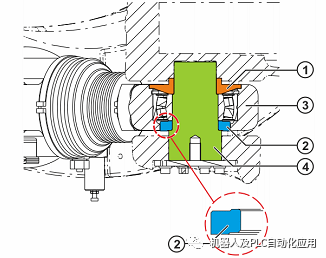
1.止推环
2.隔环
3.铰接头
4.销
5.销定位器
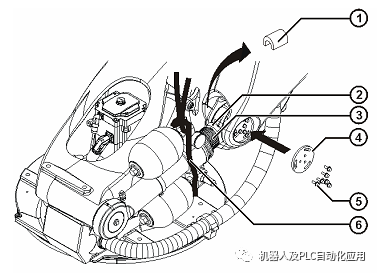
6. 旋出两个内六角螺栓及止动垫圈,取下旋转机体盖板,小心地从旋转机体的螺栓上取下平衡配重。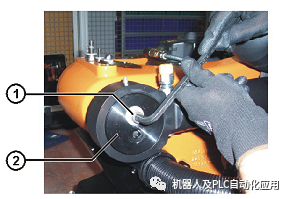
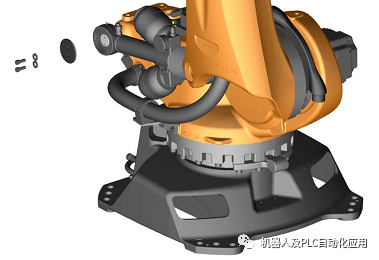
7. 将平衡配重往上抬起。其间取下止推垫圈和定距环。
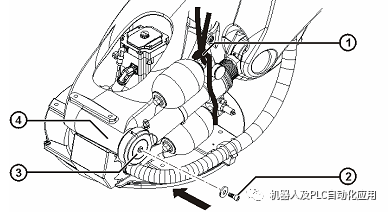
1.根吊索
2.内六角螺钉
3.套
4.旋转柱


8. 将平衡配重放在一块合适的垫子上。

1.止推环
2.隔环
3.铰接头
4.销

拧入2个螺纹嵌件螺栓。
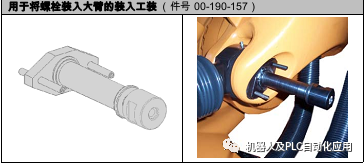
将前平衡系统销紧固至平衡系统销的安装/拆卸装置,将安装/拆卸装置的固定螺钉插入前平衡系统销的外螺纹孔中。
将冲击心轴插入安装/拆卸装置的手柄,并将其拧到前平衡系统销上。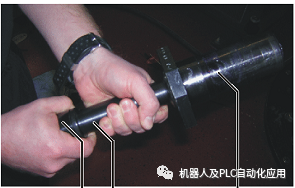
用木槌轻敲冲击心轴,敲入前平衡系统销。

安装固定板并用4个新的M8x20-10.9内六角螺钉和锥形弹簧垫圈紧固,MA=23.0 Nm。
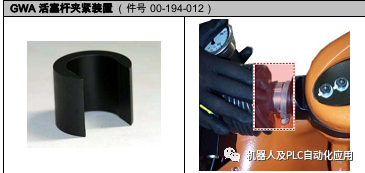
沿正方向移动连杆臂,直到松开气缸和铰接头之间的夹紧衬套,然后拆下夹紧衬套

安装平衡系统:连杆臂
1.垫片
2.波纹管
3.蜗杆传动夹
4.锁紧垫圈
5 .内六角螺钉
6.平衡系统
所需的专用工具:
审核编辑:刘清
-
机器人
+关注
关注
211文章
28745浏览量
208918 -
KUKA
+关注
关注
3文章
217浏览量
16630 -
KUKA机器人
+关注
关注
4文章
143浏览量
9195
原文标题:拆卸KUKA机器人2轴平衡配重V2.20详解版
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论