 美国复杂环境中具有弹性的自主机器人(RACER)项目
美国复杂环境中具有弹性的自主机器人(RACER)项目
导读:美国国防高级研究计划局(DARPA)的“复杂环境中具有弹性的自主机器人”(Robotic Autonomy in Complex Environments with Resiliency, RACER)项目一直在开发行驶速度与载人系统一样快的越野自主作战车辆。2022年4月,DARPA选择英特尔公司为这些越野自动驾驶车辆开发一个模拟平台,模拟这些车辆经常遇到的崎岖不平的地形类型,该项目被称为RACER-Sim。英特尔实验室后续将与巴塞罗那的计算机视觉中心和得克萨斯大学奥斯汀分校合作,共同开发该模拟平台。
RACER项目背景及定位
虽然自动驾驶汽车行业取得了巨大的自主化进展,但大多是针对结构良好、可预测性强的环境。在复杂的军事相关环境中,机器人车辆并没有表现出与作战行动相匹配的速度,而且自主性也不可靠。虽然也存在能够处理困难地形的车辆平台,但其自主算法和软件往往不能很好地处理和应对不断变化的情况,以保持必要的速度并跟上士兵执行任务。
为此,美国国防高级研究计划局(DARPA)开展了“复杂环境中具有弹性的自主机器人”(RACER)项目,旨在确保算法不会成为自主系统的限制性部分,同时自主作战车辆能够达到或超过士兵的驾驶能力。
按照项目的计划,RACER要在项目开启后的四年内开发新的算法技术,最大限度地利用无人地面车辆(UGV)的传感器和机械极限,与有人驾驶或远程操纵相同的速度和效率进行机动,并在DARPA主持的全国各地的各种地形实验中不断测试这些算法。DARPA将提供先进的UGV平台,研究团队将利用这些平台在非结构化的越野地貌上进行反复循环的模拟和测试,以开发自主软件能力。
2021年10月,DARPA把RACER项目第一阶段的合同授予了卡内基梅隆大学、NASA-喷气推进实验室和华盛顿大学,正式开启研究计划,加快研发步伐。
据DARPA战术技术办公室(TTO)负责RACER项目的项目经理斯图尔特·杨(Stuart Young)介绍:“RACER旨在颠覆性地推进机器人战车在陆军、海军陆战队和特种部队中的自主集成和实战。”
RACER项目测试平台
2021年11月,被选中的研究团队收到了DARPA提供的第一辆测试车辆RACER Fleet Vehicles(RFV)——这是一种高性能的全地形车辆,配备了优异的传感和计算能力。这些研究团队用它来开发基于平台的自主性,以便在DARPA主持的现场实验中进行测试。
RFV
之所以由DARPA为每个团队提供车辆,每个团队都拥有相同的传感器、相同的计算和相同的基于ROS的软件基础设施,是因为DARPA想要强调自主软件和算法的开发,而不是看哪个团队可以将最昂贵的传感器装在他们的车辆上。
RFV机器人包括360°范围和图像传感,如多个激光雷达、立体相机、彩色和红外成像相机、雷达、事件传感器和惯性测量传感。多个超强算力的图形处理单元(GPU)安装在专为满足RACER高速、越野需求而设计的环保、防振/抗振和热管理的电子箱 (E-Box)中。
传感器和E-box组合能够每小时收集4 TB的传感器数据,以支持在复杂地形中进行快节奏作战所需的人工智能、基于机器学习的自主算法和堆栈方法。每个RFV都包含对滚动保护、传感器/电子盒集成、自主控制和增加7kW功率供电系统的修改。这些RFV由卡内基机器人有限责任公司 (Carnegie Robotics LLC,CRL)集成,安装在Polaris RZR S4 1000 Turbo 基础的线控驱动平台上。
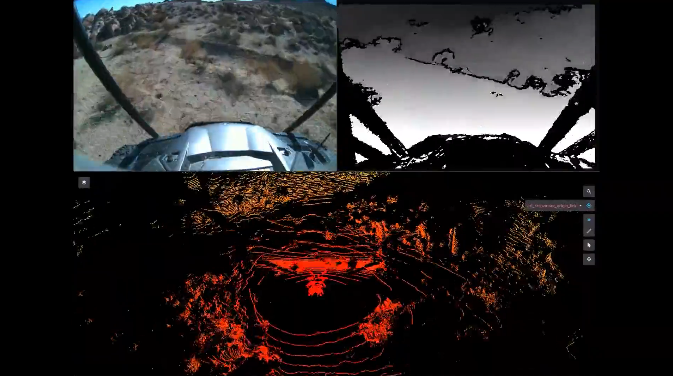
RACER传感器图像
2021年11月,三个RFV已交付给RACER第一阶段的三个入围团队,以便随后在位于加州欧文堡的陆军国家训练中心进行测试。DARPA的测试现场为各团队提供了一个展示其自主算法在复杂环境中能力的舞台。在欧文堡训练中心,各团队将展示他们在各种地形和距离长达5公里的路线上导航的能力。
为了进一步支持软件开发,DARPA还从大西洋中部和西海岸500多公里的地形中收集了超过100 TB的基于RFV 的传感器数据,这些数据均与团队共享并在RACER开发工具中进行管理以提高效率和安全性。还将提供概念性政府基线算法和自主架构。此外DARPA还鼓励各团队与基础研究型大学和工业联盟合作,在协作机器人、学习和智能系统活动中,使用陆军战斗能力发展司令部研究实验室的最新产品。
在第一阶段,这些车辆是越野车类型的。如若第一阶段取得成功,该项目第二阶段参与的每个研究团队将有机会使用进一步升级的车辆。
美国陆军自主平台演示器(APD)
美国陆军的自主平台演示器(APD)是一个六轮混合动力电动车,重近10吨,从一开始就被设计成无人驾驶。APD具备较强的跨越障碍的性能,最高速度为80km/h,可以爬升较大的坡度,也可原地调头。
DARPA计划在RACER项目的每个阶段都进行一系列的现场实验。每个实验将持续10天,每隔6个月进行一次。第一阶段的实验区域长约5公里,DARPA将其描述为“通常是无路的越野自然地形,有植被、斜坡、离散障碍物和地面变化”。这些车辆还应该能够处理常见的环境条件,包括“黄昏/黎明,中度灰尘,中度雨/雪,轻雾,自然阴影,照明变化,以及可能暴露在夜间条件下。”
各参与团队得到的只是反应实验区域的边界、路线航点和最终目标的GPS坐标列表。如果需要,团队也可以使用GPS来尝试定位,但GPS信号可能不会在任何时候都可用,即使有,也只能精确到±10米。他们也可以使用地形图,但分辨率只能达到1:50000。除此之外,各团队在测试中不能使用任何外部定位或预先存在的信息,而且也不允许使用以前的地图。为了确保目标的可实现性,DARPA将确保“在途经点之间将存在多条路线,由人类驾驶员驾驶时可以达到RACER速度指标”。
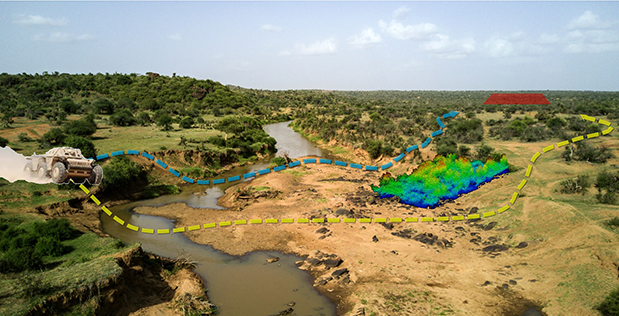
RACER项目的测试场景
DARPA的希望是,在第一阶段,团队能够展示每小时18公里的平均自主速度,所需干预的频率不超过每2公里一次。第二阶段,使用APD,目标将明显更加激进,路线长度为15至30公里或更多,平均自主速度目标为29公里/小时,每10公里才干预一次。这些指标是DARPA希望自主车辆能够做到的。“以载人战车的作战节奏速度保持机动性,特别是以M1艾布拉姆斯主战坦克为主要对象。”
RACER-Sim项目
在RACER项目开启的同时,DARPA还授出了两项合同给Duality Robotics和Intel-Federal团队,以开发模拟环境来支撑越野自主算法的开发。该计划被称为RACER-Sim,旨在扩展当前的模拟能力和基于物理的模型,这些模拟环境将允许团队模拟测试和验证其自主算法的一部分,而无需花费大量时间和金钱进行现场测试。
2022年4月, DARPA把RACER-Sim合同授予英特尔公司的英特尔实验室及其合作者——巴塞罗那计算机视觉中心和得克萨斯大学奥斯汀分校。
英特尔实验室自动驾驶汽车实验室主任German Ros在谈到这个话题时表示:“英特尔实验室已经开始通过包括CARLA模拟器在内的多个项目在开发自动驾驶汽车仿真方面取得了进展。我们很自豪能加入 RACER-Sim,为探索越野机器人和自动驾驶汽车领域的新视野做出贡献。我们组建了一支由来自计算机视觉中心和得克萨斯大学奥斯汀分校的知名专家组成的团队,目标是创建一个多功能和开放的平台,以加速适用于所有类型环境和条件的越野地面机器人的进展。”
RACER-Sim的目标是提供高保真虚拟世界,用于开发和测试自主越野车辆
RACER-Sim由两个阶段组成,总共持续48个月,在第一阶段,英特尔的重点是创建新的仿真平台和地图生成工具,以高精度模拟复杂的越野环境(例如物理特征、传感器建模、地形复杂性等)。大规模创建模拟环境是一个传统上需要大量资源的过程,也是模拟工作流程中最大的挑战之一。英特尔实验室的模拟平台将支持对未来地图的定制,包括只需点击几下即可创建覆盖超过100000平方英里的大型新环境。
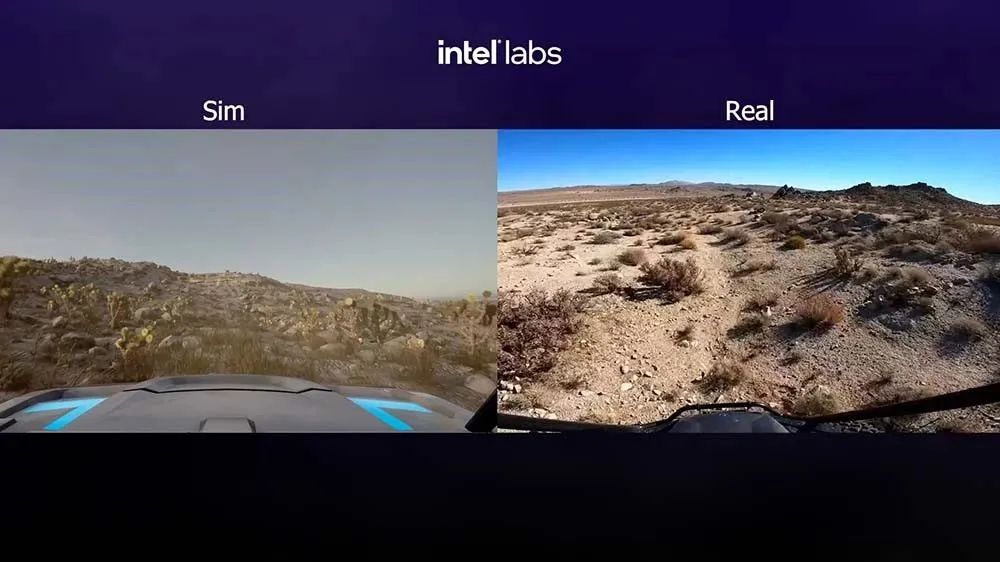
在第二阶段,英特尔实验室将与RACER合作者合作,通过在不使用物理机器人的情况下实施新算法来加速研发过程。然后,团队将在模拟中验证机器人的性能,从而节省大量时间和资源。第二阶段还将包括开发新的Sim2real技术——在模拟中训练机器人以获取技能,然后将这些技能转移到相应的真实机器人系统的概念——从而能够直接在模拟中训练越野自主地面车辆。
英特尔希望这些新的仿真工具能够显著改进使用虚拟测试的自主系统的开发,从而降低与传统测试和验证协议相关的风险、成本和延迟。未来,仿真平台将超越验证,创建可应用于现实世界中的AI模型。
小结
DARPA的RACER项目是对当前自主驾驶技术的巨大突破,相比于模式化的城市道路,军事越野环境更具挑战性和复杂性,有三维表面、数百个障碍物类别、较低的保真度、有限的地图数据以及没有确定的道路网络或驾驶规则。虽然目前的公路自动驾驶不能直接转移到越野领域,但公路自动驾驶车辆的传感器、处理方法、感知算法和其他方法是适用的。RACER正是试图利用这些已有技术,将其应用于军事越野领域,并将其推广到更广阔的环境中。
审核编辑 :李倩
-
机器人
+关注
关注
211文章
28524浏览量
207563 -
自动驾驶
+关注
关注
784文章
13877浏览量
166618
原文标题:美国复杂环境中具有弹性的自主机器人(RACER)项目
文章出处:【微信号:CloudBrain-TT,微信公众号:云脑智库】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
开源项目!能够精确地行走、跳舞和执行复杂动作的机器人—Tillu
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】1.全书概览与第一章学习
《具身智能机器人系统》第7-9章阅读心得之具身智能机器人与大模型
【「具身智能机器人系统」阅读体验】+数据在具身人工智能中的价值
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
旗晟轨道巡检机器人:复杂环境中的安全卫士

开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
柔性机器人与刚性机器人区别与联系






 工商网监
工商网监
评论