 KUKA SafeRobot CRR模式介绍
KUKA SafeRobot CRR模式介绍
SafeRobot CRR模式(安全机器人收回)
如果机器人违反了监控功能并被安全控制器停止,则只能在 CRR 模式下将其移出违反区域。CRR 模式下的运动速度对应于安全配置中定义的 T1 模式下安全降低的笛卡尔速度。
在 CRR 模式下,机器人可以移动到任意位置。
如果它通过其他监控限制,则不会触发停止。速度监控功能在 CRR 模式下保持激活状态。
KUKA _SafeRobot->SafeOperation检查参考.
调整参考用于检查机器人的当前位置和附加轴是否与r参考位置一致。
当使用Modulo 360°调整参考值时,即考虑到无限旋转的轴,即 h。参考位置始终相对于圆。
如果当前位置和参考位置之间的偏差太大,则调整参考失败。机器人以安全停止1停止,并且只能在操作模式T1下移动。如果调整参考成功,则可以使用安全控制器对机器人进行安全监控。
只要未进行调整参考,就不会验证要监视的位置。建议尽快进行调整参考。
安全专员必须通过风险评估来确定特定系统是否需要其他安全措施,例如: B.不进行调整参照时的参照停止。
必须将要安全监控的每个轴分配给一个参考组。机器人轴始终分配给参考组1.可以将其他轴分配给其他参考组,也可以分配给参考组1
对于调整参考,参考组的所有轴都必须在参考位置,以阻尼参考按钮。如果参考组的所有轴均未参与阻尼参考按钮,则无法检查轴的位置。
以下事件要求调整引用:
1.机器人控制重新启动(内部要求)
2.机器人已重新调整(内部要求)
3.I / O驱动程序已重新配置(内部请求)
4.外部输入$ MASTERINGTEST_REQ_EXT,例如 B.来自安全PLC(外部要求)
机器人控件启动后,无需调整基准即可将机器人移动2小时。监视时间结束后,机器人将以安全停止1停止,安全控制器将发出以下消息:确认:调整参考时间间隔已到期。
调整引用可以通过以下方式启动:
自动地
为此,将“调整参考”序列集成到应用程序中,以便循环调用它。如果请求调整参考,程序将检测到它并开始调整参考。
手动地
为此,请手动启动“调整参考”序列。如果请求调整参考,程序将识别出该信息并启动调整参考。

Referenzgruppe参考组
必须将要安全监控的每个轴分配给一个参考组。机器人轴始终分配给参考组1。可以将其他轴分配给其他参考组,也可以分配给参考组1 。
1:机器人轴
1…3:附加轴 默认值:1
--------------
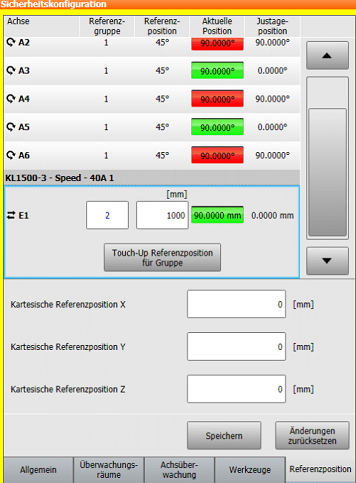
Referenzposition参考位置
参考位置的轴特定坐标
为了监视调整,为特定的直角坐标参考位置定义了机器人轴的轴角。在进行调整参考的情况下,机器人将逼近直角坐标参考位置,并将实际位置与轴的目标位置进行比较。
旋转轴:-360°…+ 360°
默认值:45°
线性轴:-30 000 mm…+30 000 mm
默认值:1,000毫米
-----------------
Aktuelle Position 当前位置
轴特定的实际位置(仅显示)
红色:参考位置太靠近调整位置,因此不允许
绿色:允许的参考位置
---------------
Justageposition调整位置
调节位置的轴角在机床数据中定义。(仅显示)
审核编辑:刘清
-
控制器
+关注
关注
112文章
16408浏览量
178678 -
plc
+关注
关注
5013文章
13335浏览量
464260 -
KUKA
+关注
关注
3文章
217浏览量
16573 -
KUKA机器人
+关注
关注
4文章
143浏览量
9114
原文标题:KUKA _SafeRobot 检查参考点请求V
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
KUKA库卡机器人伺服驱动器相关型号举例
KUKA机器人伺服驱动模块维修
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
关于KUKA 焊接机器人
KUKA _SafeRobot->SafeOperation检查参考

KUKA _SafeRobot->SafeOperation检查参考

简单介绍KUKA外部轴应用

KUKA机器人怎样通过触发器激活扭矩模式
KUKA_SafeRobot检查参考点请求
KUKA机器人密码介绍





 工商网监
工商网监
评论