 KUKAC4机器人电机风扇故障
KUKAC4机器人电机风扇故障
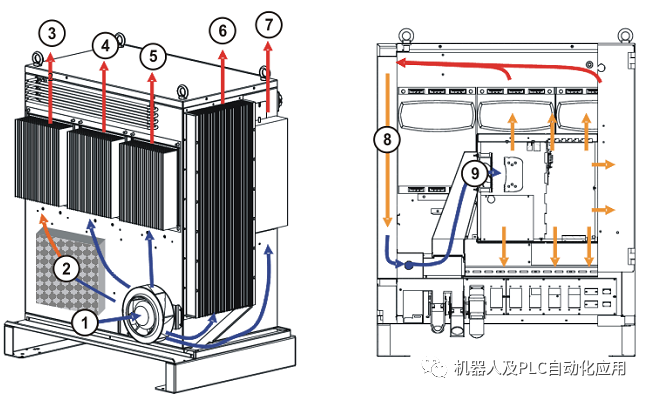
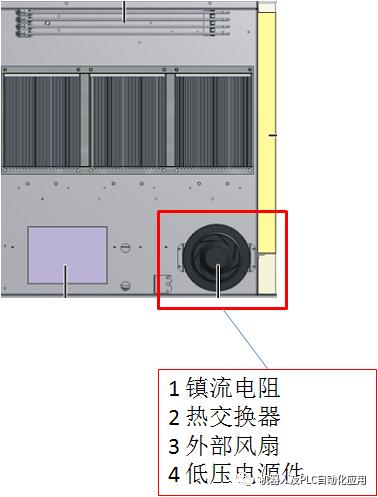
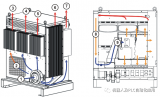
箱柜冷却系统说明:
箱柜冷却装置包含两条冷却循环回路。装有控制、功率电子元器件的箱内范围通过一个换热器进行散热。
在箱柜的外部区域,KPP 和 KPS 的低压电源件、镇流电阻和散热体则直接通过外部空气适当冷却。
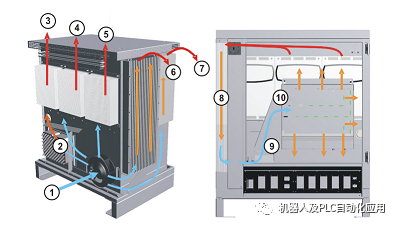
1外部风扇进气口
2低压电源散热器
3带KPP 8换热器的空气出口
4 KSP 9吸入管CCP的空气出口
5带KSP 10 PC风扇的空气出口
6热交换器空气出口
7网络过滤器空气出口
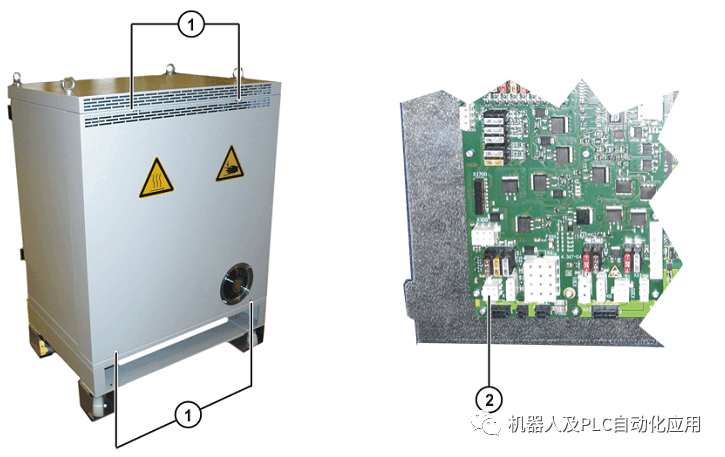
外部风扇更换步骤
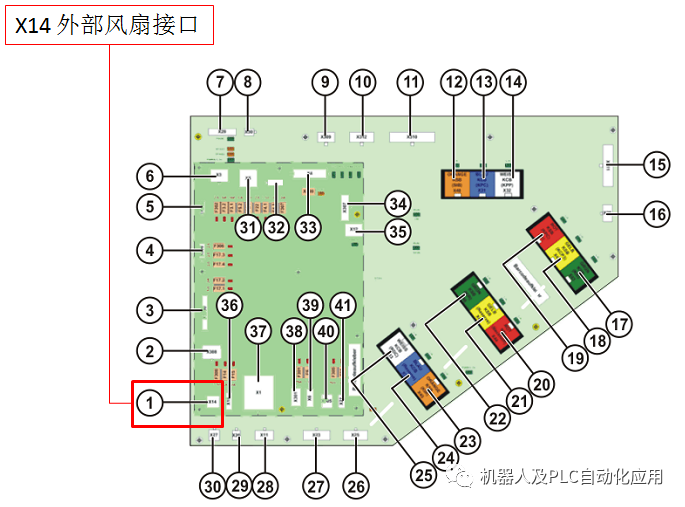
1. 从控制柜拔出风扇插头(2) X14。
2. 拧松四条螺丝(1) 并将背板拆出。
3. 将进线套筒的固定螺丝(1)拆出。
4. 将进线套筒(2)折回,然后拉出连接线。
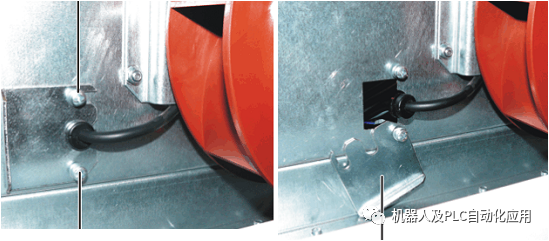
5. 将风扇支架(1) 连同风扇一起取下。
6. 将新风扇连同支架一起装上并固定。
7. 将连接线引入箱柜内。
8. 装上进线套筒。
9. 装上背板,并将其固定
10. 将风扇插头X14 插到控制柜上。
20.F14 外部风扇7.5 A
KUKA 机器人报:"外部风扇转速低故障"
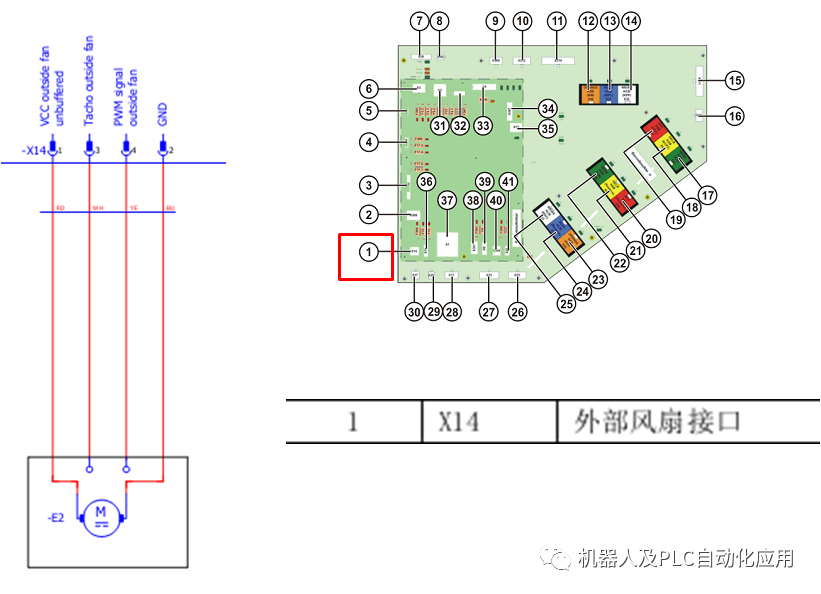
对电箱外部风扇进行清理,进行关机冷启动.故障消除
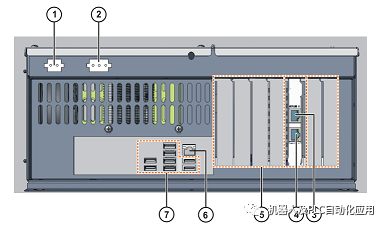
1插头X961 DC 24V电压电源
2 X962 PC风扇插件
3 LAN双NIC–KUKA控制器总线
4 LAN双NIC–KUKA线路接口
5个现场总线卡插槽1至7
6 LAN板载–KUKA系统总线
PC风扇结构

1.风扇插头
2.PC控制计算机外壳
3.风扇
4.风扇格栅
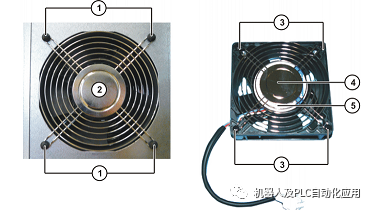
1安装心轴
2风扇格栅的外侧摩擦
3风扇格栅的安装(膨胀铆钉)
4风扇格栅
5风扇铭牌
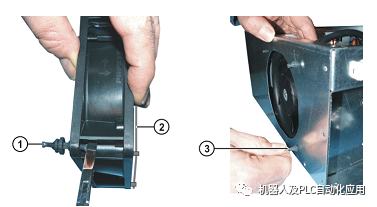
1风扇安装销
2风扇格栅
3计算机外壳上的安装销
审核编辑:刘清
-
机器人
+关注
关注
211文章
28405浏览量
207020 -
散热器
+关注
关注
2文章
1056浏览量
37546 -
热交换器
+关注
关注
2文章
63浏览量
11255 -
KUKA
+关注
关注
3文章
217浏览量
16525 -
KUKA机器人
+关注
关注
4文章
143浏览量
9077
原文标题:KUKAC4机器人电机风扇故障,使得机器人没有好使能.V2
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
安川机器人伺服电机维修,常见机器人伺故障服电机和维修方法
ABB机器人发生不一致路径精确性故障维修
KUKA焊接机器人伺服电机常见故障及维修处理
机器人关节用什么电机?
KUKAC4机器人电机风扇故障,使得机器人没有好使能.
KUKAC4机器人电机风扇故障,使得机器人没有好使能.
KUKAC4机器人焊钳拉拽程序分析sg_fehler ()w


KUKAC4机器人电机风扇故障
KUKAC4机器人电机风扇故障,使得机器人没有好使能.V2
KUKAC4机器人首次开机启动






 工商网监
工商网监
评论