 SafeRobot CRR模式设置
SafeRobot CRR模式设置
SafeRobot CRR模式(安全机器人收回)
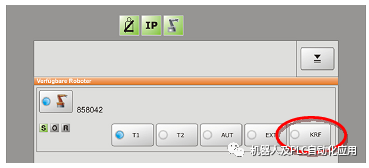
如果机器人违反了监控功能并被安全控制器停止,则只能在 CRR 模式下将其移出违反区域。CRR 模式下的运动速度对应于安全配置中定义的 T1 模式下安全降低的笛卡尔速度。
在 CRR 模式下,机器人可以移动到任意位置。
如果它通过其他监控限制,则不会触发停止。速度监控功能在 CRR 模式下保持激活状态。
KUKA _SafeRobot->SafeOperation检查参考.
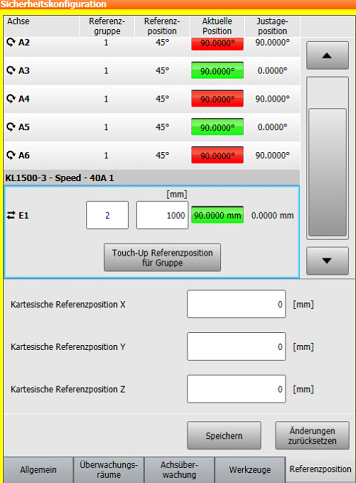
参考点组(参照组)
选择参考点位置
选择标准 参考点位置必须根据以下标准进行选择:
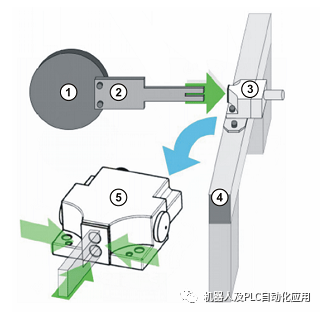
• 参考点开关的位置和触发板不会妨碍机器人的工作。
• 轴在参考点位置处不得彼此位于奇点内。
• 参考点开关的两个接近开关表面在参考点位置处由触发面触发(触发板或工具)。
• 同一个参考点组中的所有轴位于参考点位置,以便触发参考点开关。
• 机器人轴在参考点位置处距零点标定位置至少有 ±5°(旋转轴)或±15 mm(线性轴)。
• 参考点开关的位置位于机器人运动范围内。
2.安装参考点开关和触发板。
3.连接参考点开关。
连接参考点开关连接导线:X42 插入机器人控制系统,XS Ref 插入参考点开关。
或者和PLC相连接,通过PLC与机器人通讯的安全点反馈给机器人."JR"零点复归(参考点开关的输入端).
4.配置用于零点复归测试外部要求的输入信号$MASTERINGTEST_REQ_EXT。
该信号已在目录 KRC:ROBOTER KRCSTEUMADA 下的文件$machine.dat 中进行了声明且必须分配给一个合适的输入端。
默认设置下,信号位于 $IN[1026]。

5. 在文件“masref_user.dat”和安全配置中配置待检查的参考点组。
6. 在程序“masref_user.src”中示教零点复归测试位置。必须在程序“masref_user.src”和安全配置中示教参考点位置。
7. 仅在参考点开关被工具的铁磁体部分触发时或在更换工具之后:检查参考点位置的准确度。
8. 如果应自动启动零点复归测试:将程序“masref_main.src”以适当的形式接入应用程序,使其可作为子程序循环调用。
9. 如果应手动启动零点复归测试:手动启动程序“masref_main.src”。
参考位置必须符合以下标准:
距母版位置至少+/-5°
轴不能处于奇点的相对位置
不得妨碍程序执行
必须启动两个接近开关表面(最大距离2mm)
调整参考用于检查机器人的当前位置和附加轴是否与r参考位置一致。
当使用Modulo 360°调整参考值时,即考虑到无限旋转的轴,即 h。参考位置始终相对于圆。
如果当前位置和参考位置之间的偏差太大,则调整参考失败。机器人以安全停止1停止,并且只能在操作模式T1下移动。如果调整参考成功,则可以使用安全控制器对机器人进行安全监控。
只要未进行调整参考,就不会验证要监视的位置。建议尽快进行调整参考。
安全专员必须通过风险评估来确定特定系统是否需要其他安全措施,例如: B.不进行调整参照时的参照停止。
必须将要安全监控的每个轴分配给一个参考组。机器人轴始终分配给参考组1.可以将其他轴分配给其他参考组,也可以分配给参考组1
对于调整参考,参考组的所有轴都必须在参考位置,以阻尼参考按钮。如果参考组的所有轴均未参与阻尼参考按钮,则无法检查轴的位置。
以下事件要求调整引用:
1.机器人控制重新启动(内部要求)
2.机器人已重新调整(内部要求)
审核编辑:刘清
-
控制器
+关注
关注
113文章
16775浏览量
181857 -
机器人
+关注
关注
212文章
29136浏览量
210561 -
plc
+关注
关注
5025文章
13547浏览量
470106
原文标题:KUKA _SafeRobot 参考点设置及检查参考点请求V2.22
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
求助,关于STM32F103翻转使用的疑问求解
求助,关于比较寄存器TIMx_CRR1赋值的疑问
直流电子负载仪的设置CV模式下负载
KUKA SafeRobot CRR模式介绍
伺服电机的几种常用模式及控制模式的设置(DS402)

松下伺服速度控制模式怎么设置
示波器怎么设置触发模式
是德示波器滚动模式设置指南





 工商网监
工商网监
评论