 蝠鲼仿生柔软机器鱼
蝠鲼仿生柔软机器鱼
这篇文章来源于DevicePlus.com英语网站的翻译稿。
©Tiefeng Li等人,2017
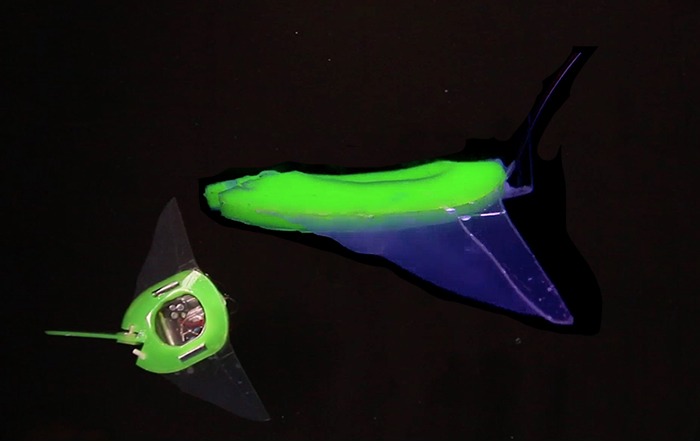
柔软机器人正逐渐成为机器人领域的新热门。最近,来自中国杭州浙江大学的工程师团队研发了一种蝠鲼仿生机器鱼,其板载系统十分完整,包括供电和遥控等部分。机器鱼体长9.3厘米(加上尾巴18.5厘米),重量只有90.3克,单次电池充电后能在水中游3个小时之久。柔软机器鱼为许多未来的应用领域带来了希望,比如在复杂的海洋环境中监测水质或发现新的海洋生物。
传统机器人由刚性材料制成,这些材料通常会限制机器人的变形能力以及让自身形状适应外部环境的能力。虽然这些刚性机器人具有输出力大、精度高、可控性强等优点,但是往往缺乏自然生物的多功能特性。另一方面,柔软机器人可以实现弹性变形,并且能够通过狭窄空间而不会导致内部损坏。
许多柔软机器人由刚性电机或者刺激响应型软执行器驱动。而后者的轻便性、灵活性和紧凑性使其更适用于柔软机器人。软执行器的种类很多,比如形状记忆合金(SMA)、介电弹性体(DE)、响应性水凝胶和活细胞。本文中的蝠鲼仿生机器人通过DE和离子导电水凝胶驱动,这与由透明水凝胶制成的柳叶鳗仿生柔软水凝胶伪装机器人有些类似。DE以迅速的响应速度以及较大的动作著称,但是这种材料对高电压和厚绝缘的要求限制了它们在基于软启动器的机器人中的应用。为了减轻这种不便,研究人员决定使用周围的开放水域(“弱而充分”的电导率)作为电极,从而解决了进一步绝缘的需要。

图1. 柔软机器鱼的制作 /©Tiefeng Li等人,2017
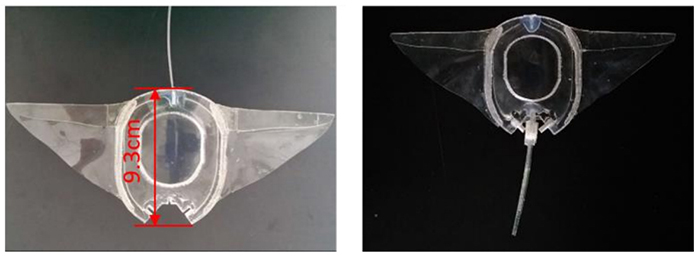
图2. 通过硅胶固化制作的柔软鱼身(左);柔软鱼身上的尾巴 /©Tiefeng Li等人,2017
机器鱼的肌肉由DE膜构成;翅片由薄硅膜构成;柔软的弹性身体由硅胶框构成。鱼身还连接了一条带有嵌入式电磁铁的硅胶鱼尾,以便进行转向。
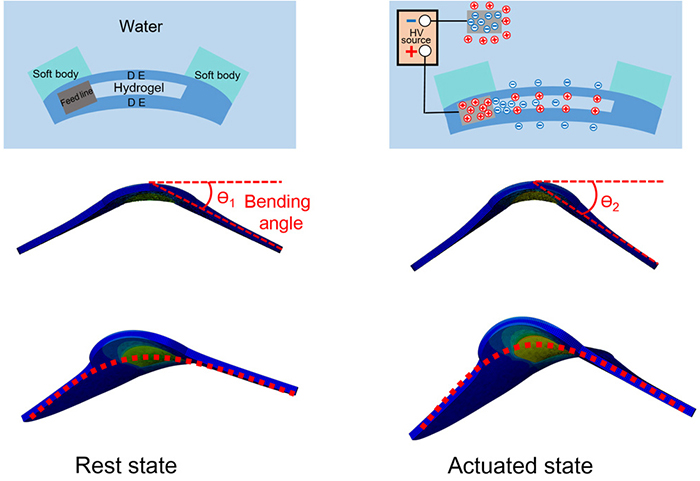
图3. 拍打胸鳍的致动机制 /©Tiefeng Li等人,2017
DE膜内部是水凝胶,而水凝胶与离子导电电极(馈线)连接相连。向电极施加电压时,电场会驱动周围水中的离子以及水凝胶。正电荷和负电荷积聚在DE膜的两侧,请参见图3的第2张示意图。水凝胶带正电的边缘被吸引至DE膜外部水中带负电荷的电子,当这些粒子彼此吸引时,它们会挤压之间的部分,导致DE膜变形(致动状态)。停止供电后,机体返回其原始配置(静止状态)。如果提供循环电压,那么机器鱼就会像游泳的蝠鲼一样上下摆动翅片。
翅片的上下摆动会引发软硅胶膜的波动运动,从而实现下面视频所示的正向推进。机器鱼动作时(即用线连接一个放大的AC电压信号)会产生一个推力。其游泳速度取决于施加电压的幅度和频率。当施加电压的幅度和频率分别为10 kV和5 Hz时,机器鱼的最大速度为13.5 cm/s。
对于无线系统,该团队研发了一种名为“Epod”的电子舱,里面含有一个高压放大器、一块锂离子电池以及红外(IR)遥控电路。Epod的重量为47.8克,其内部刚性组件封装在硅胶中。然后,设计人员将Epod粘在鱼体下方。
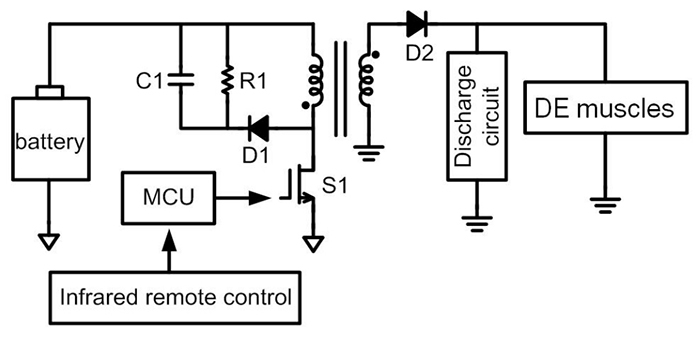
图4. Epod中高压放大器电路图 /©Tiefeng Li等人,2017
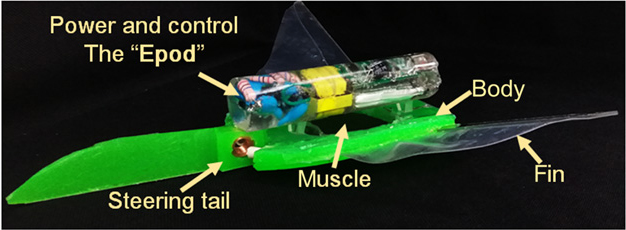
图5. 无线柔软机器鱼 /©Tiefeng Li等人,2017
凭借一块3.7 V 450 mAh锂电池,单次充电后,机器鱼能够以1.1 cm/s的速度游3.15小时;以3.1 cm/s的速度游1.5小时。此款无线机器人的最大前进速度为6.4 cm/s(9.5 kV和5 Hz)。速度降低的主要原因是总重量增加(从42.5克升至90.3克)以及Epod的额外阻力。另外,配备有摄像机的机器人还可以通过远程IR控制进行掉头(本文的第一个视频)。
由于该机器人的高适应性和高敏捷性,它甚至可以在极端温度条件下游泳(比如0.4°C至74.2°C),不需要添加保温措施。该机器人还展示出卓越的伪装能力,它可以很容易地融入到背景中,几乎看不到。

Yulhane-Jerez Koh
Yulhane毕业于加州大学伯克利分校(UC Berkeley),是一名生物力学工程师,同时也是美国deviceplus公司的执行编辑。Yulhane的主要兴趣在于群体机器人、机器学习和神经科学领域。
审核编辑黄宇
-
机器人
+关注
关注
211文章
28467浏览量
207330 -
电池
+关注
关注
84文章
10590浏览量
129975
发布评论请先 登录
相关推荐
大象机器人11月大事件回顾
月泉仿生完成近亿元Pre-A轮融资
安泰功率放大器如何驱动20kHz水声换能器超声驱鱼


ATA-L8水声功率放大器在超声驱鱼中的作用是什么






 工商网监
工商网监
评论