 最酷的Kickstarter机器人 第2部分 – 以往成果
最酷的Kickstarter机器人 第2部分 – 以往成果
这篇文章来源于DevicePlus.com英语网站的翻译稿。
点击此处阅读本文的第1部分>
©Plum Geek
本文是最酷Kickstarter资助的机器人项目系列文章的第2部分。
1. Quadbot
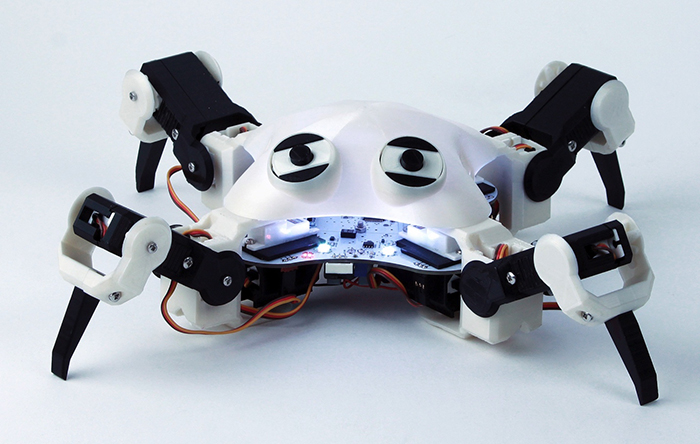
©EngiMake
Quadbot是一款基于Arduino的、开源、可3D打印、可编程的行走机器人。其制造目的是让人们有机会学习与机器人相关的实际技能,比如编程和电子学。QuadBot的制造商EngiMake表示,所有对机器人感兴趣的人,无论是高级开发人员还是初学者,都能获得适合自身条件的机器人套件。
QuadBot的制作套件(Maker Kit)是拥有3D打印机人群的理想工具。对于那些想要自己打印零件并重新设计机器人机身的人来说,该套件是一种低成本的选择。而QuadBot的完整套件(Full Kit)则提供了QuadBot组装所需的一切。完整套件稍贵一点,但是配有3D打印的机械机身部件。完整套件+蓝牙(包括EngiMake蓝牙模块),能让用户实现带有无线连接和远程控制功能的QuadBot机器人。
QuadBot也是一款与Arduino IDE完全兼容的开源机器人平台,同时提供简化的用户界面和用户库。初学者可以使用图形模块进行编程,而高级开发人员则可以深入了解基于C++的代码来定制QuadBot的行为。比如,QuadBot可以通过编程实现行走、跳舞、跟踪轨道、播放歌曲等功能。
2. bots_alive
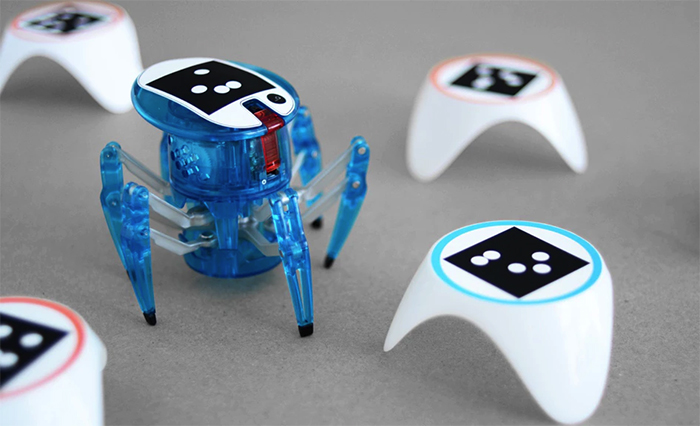
©bots_alive
bots_alive为遥控Hexbug Spider(机器蜘蛛)赋予生命!这些小动物机器人是完全自主机器人,可以根据人工智能做出自己的决定。bots_alive项目旨在创建看起来更具“灵性”的机器人,让人们更愿意与之互动。bots_alive的创始人Brad Knox博士表示,小型机器人的AI和行为是“多样的且不可预测的,但仍然有意义”。
用户的iOS或安卓智能手机成为机器人的“眼睛和大脑”,而机器人本身则成为“由手机控制的肌肉”。应用程序通过专门为增强现实设计的计算机视觉功能,利用手机相机检测机器人的位置及其游戏对象的位置,并向机器人发送关于如何与环境中的这些对象进行交互的命令。
Bots_alive基本套件(Base Kit)配备了用于避障路径功能的视觉模块、用于无线手机控制的IR Blaster以及兼容iOS和Android的应用程序。对于已经拥有Hexbug Spider的人来说,这是一个很好的选择。bots_alive完整套件(Complete Kit)则提供了赋予这些自主机器人生命所需的一切,除了智能手机!该套件提供Hexbug Spider以及基本套件中的其他组件。bots_alive双机器人套件(Double Bot Kit)则提供两个可以互相交互的Hexbug Spider以及游戏环境中的各种物体。

©Mime Industries
MeArm Pi是一款由Mime Industries研发、为所有年龄段设计的开源Raspberry Pi机械手臂套件。该机器人手臂易于组装,并配有项目启动所需的一切内容,比如搭载两个板载操纵杆的Raspberry Pi HAT、4个金属齿轮伺服电机、手臂的塑料部件、六角扳手等。MeArm Pi可以通过板载编程功能或浏览器编程功能进行编程。支持多种语言和方法(比如Node.js、Python和Ruby、Scratch、Perl、Java和Basic),允许用户创建不同的脚本和命令来控制MeArm Pi。该机械手臂还可以通过Pi HAT板载操纵杆直接控制,以便让用户直观地操纵手臂的各个伺服电机。
金属齿轮伺服系统通过Raspberry Pi的GPIO引脚直接控制,因此便于定制HAT进行访问。该机械手臂配备了用于操纵杆控制的I2C ADC,而Pi可以与之直接通信。手臂还搭载一枚显示状态的板载RGB LED,该LED也通过GPIO引脚控制。MeArm Pi可以使用标准2A Pi电源(或者用于重负载的2.5A电源)供电,也可使用HAT的微型USB电源输入供电。MeArm Pi还附带了预先编写的Node.js应用程序。该应用程序具有基于WebSocket的API,使得用户能够通过家庭网络或因特网连接远程控制Pi。
该机械手臂提供两种不同的套件:第一种提供将您自己的Raspberry Pi与套件相集成所需的必要组件;另一种则提供一切内容,包括Raspberry Pi 3。
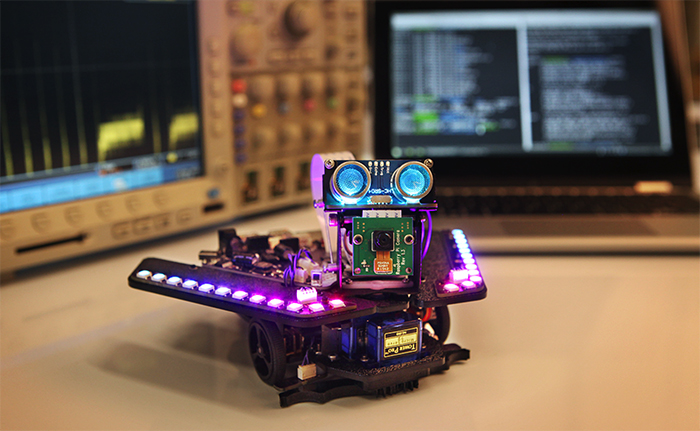
8. Spirit Rover

©Plum Geek
Spirit Rover是火星探测车“Spirit”和“Opportunity”的桌面版本。Spirit Rover的设计灵感来自于真正的火星探测车,是一种可远程控制、拥有计算机视觉的无限可定制机器人。该机器人为初学者和高级开发人员提供了一种可扩展的、功能齐全的机器人平台,是一款非常棒的学习工具。Spirit Rover的独特功能之一就是整合了目前两个最受欢迎的DIY平台:Raspberry Pi迷你电脑和兼容Arduino的处理器。Spirit Rover可以通过Raspberry Pi上的Python和C/C++或者Arduino IDE上的C/C++进行编程。除了这两款比较流行的电路板,Spirit Rover还配备了一块Microchip PIC处理器。PIC微控制器含有预加载代码,能够“实现机器人的底层处理”,比如读取光传感器、向伺服发送脉冲信号以及管理电源系统。
用户可以从简单的任务开始,比如读取光传感器,然后再实现更高级的机器人任务。Spirit Rover的器件包括:一个3轴加速度计和3轴陀螺仪,用以感测旋转和移动;27个可单独控制的、遍布全身(比如眼睛、翅膀等部位)的NeoPixel RGB LED灯,用以显示任何颜色或亮度。凭借Raspberry Pi相机,Spirit Rover能够观察外部环境,实现智能巡航。机器人还配有可用于拖动或抓住小物体的夹臂。Pi相机负责显示被拖动或被抓住的物体。Spirit Rover的另一个独特之处在于它能够实现使用XBee模块的机器人之间的长距离联网。
我们希望您会喜欢这些Kickstarter机器人项目。请一定来这里查看我们的机器人教程噢!
点击此处阅读本文的第1部分>

Yulhane-Jerez Koh
Yulhane毕业于加州大学伯克利分校(UC Berkeley),是一名生物力学工程师,同时也是美国deviceplus公司的执行编辑。Yulhane的主要兴趣在于群体机器人、机器学习和神经科学领域。
审核编辑黄宇
-
机器人
+关注
关注
212文章
29169浏览量
210624 -
Arduino
+关注
关注
188文章
6483浏览量
189472
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论