 柔软的水凝胶伪装机器人
柔软的水凝胶伪装机器人
这篇文章来源于DevicePlus.com英语网站的翻译稿。
如今,机器人并不只是朝着类人机器人方向发展,它们还会模仿海洋生物的样子。受到柳叶鳗(鳗鱼的透明幼体)的启发,MIT工程师们研发出了多种能够完成多项任务——比如游泳、踢橡胶球、捕捉和释放水中的活鱼等——的柔软伪装机器人。这些机器人是由什么构成的呢?它们完全由透明的水凝胶材料(一种水聚合材料,主要成分是水)制成。
由MIT机械工程副教授Xuanhe Zhao和研究生Hyunwoo Yuk领导的研究团队一直致力于开发持久耐用、灵活、同时又能完成强大任务的水凝胶配方。该团队已经制造出多种不同种类、不同功能的水凝胶机器人:能够上下卷曲的附肢;可以来回摆动的鳍状模型;能够有效捕捉、释放的手状夹持器(图2、图3和图4)。
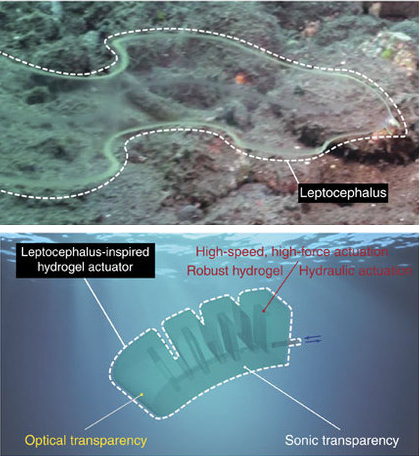
图1鳗鱼透明幼体(上图)以及受柳叶鳗启发制成的水凝胶致动器(下图)示意图。/©Yuk等人,2017
这些机器人通过液压水凝胶致动器实现,而不是现有的渗透驱动型水凝胶致动器。由于响应时间和水凝胶致动力之间的固有耦合关系,后者受限于低致动力(毫牛顿)和低致动速度(响应时间为几分钟至几小时)。而凭借精确设计的结构,液压驱动型水凝胶允许机器人拥有更大的致动力(超过1牛)和致动速度。这些机器人还能够在水中进行光学和声学伪装。
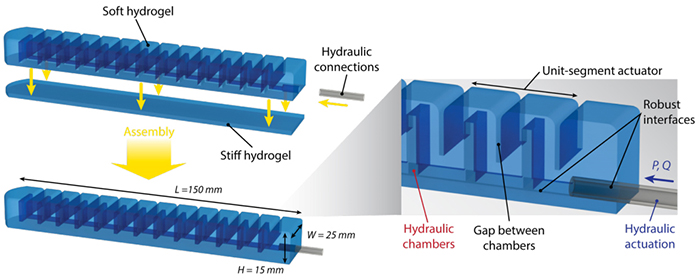
图2柔软弯曲致动器示意图/©Yuk等人,2017
每个机器人都由柔性弯曲致动器组成。弯曲致动器的外形尺寸为25 x 150 x 15 mm,由7个单元段致动器串联在一起。柔性水凝胶部件拥有液压腔和液压连接功能。而刚性水凝胶部件由不易伸长的元件制成,以在液压致动下实现弯曲。与现有的渗透水凝胶致动器相比,这种宏观水凝胶致动器具有非常快的运动速度。它可以在不到1秒钟内实现20度的弯曲动作。
注:为了获得最佳的视觉效果,研究人员把透明水凝胶染成了桃红色。
水被泵入致动腔,为机器人提供源动力。请看下面的视频,一根竖直的水凝胶致动器在1秒钟内弯曲成一个完整的圆。随着水被泵出,致动器又在1秒钟内恢复到原来的形状。而由相同水凝胶制成的渗透型水凝胶致动器执行相同弯曲运动所需要的时间则比上述时间长的多(几个小时)。
注:为了获得最佳的视觉效果,研究人员把透明水凝胶染成了桃红色。
在实验中,研究团队制造了一种水凝胶机器鱼,可以像真正的鱼一样游泳;以及一个手状水凝胶夹持器,随着水的泵入和泵出,夹持器可以实现抓取和释放功能。
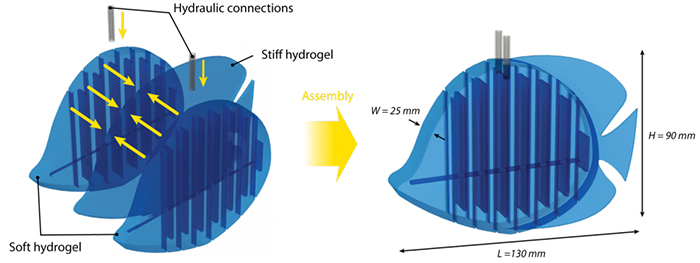
图3水凝胶机器鱼示意图/©Yuk等人,2017
请看下面的视频,一条水凝胶机器鱼在彩虹背景下游泳时保持伪装状态。机器鱼还能通过液压驱动的敏捷尾部动作执行向前的鱼类游动。两个独立的液压部件控制鱼的液压动作(图3)。
下图中的伪装水凝胶夹持器能够快速弯曲,以捕捉、释放活的金鱼。由于其光学透明度,水凝胶夹持器在接近水槽中的金鱼时可以保持伪装状态。水凝胶的敏捷动作使得夹持器能够成功捕获金鱼,而其固有的柔软度不会对捕获、释放的金鱼带来任何伤害。
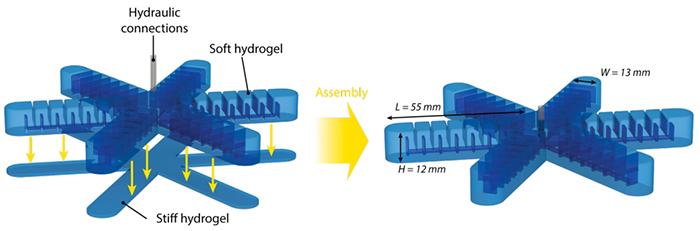
图4水凝胶夹持器示意图/©Yuk等人,2017
六个弯曲致动器由一个液压输入端同时致动,从而操作夹持器(图4)。
水凝胶结构几乎完全透明,因此在水下可以完全伪装起来。它们的声学和光学性质也与水几乎相同。柔性致动器和机器人通常使用诸如Ecoflex和Elastosil这样的有机硅弹性体。它们是可拉伸的,但具有光学不透明度,在可见光范围内的透光率只有5%。然而,PAAm-藻酸盐水凝胶在可见光范围内拥有高得多的透射率,95%;其反射率(1.3365)也与水的反射率接近(1.333)。PAAm-藻酸盐水凝胶也具有显著的声波特性。水凝胶结构内的声速(1485.7 m/s)几乎与纯水相同(1447.5 m/s)。PAAm-藻酸盐水凝胶的声阻抗(z0 = 1.487×106Pa·s-1)与纯水的声阻抗(z0 = 1.448×106Pa·s-1)仅相差约1%。
光学和反射声波特性通常用于水下环境中的感应应用场景。水凝胶的光学和声学特性与水非常相似,这使得液压水凝胶致动器成为伪装设备的完美选择。据研究人员介绍,这些基于水凝胶的致动器和机器人在生物医学、可调光学、软电子学和机器人学等领域拥有实际应用意义。
举个例子,我们可以进一步改善水凝胶器件,将其用于治疗用途,比如靶向给药。由于水凝胶的光学和声波透明度,这些器件也可用于实现实时高保真光学和超声成像。

DevicePlus 编辑团队
设备升级版适用于所有热爱电子和机电一体化的人。
审核编辑黄宇
-
机器人
+关注
关注
211文章
28476浏览量
207416 -
致动器
+关注
关注
0文章
32浏览量
4132
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
水凝胶半导体材料问世,有望用于生物集成电路
“0元购”智元灵犀X1机器人,软硬件全套图纸和代码全公开!资料免费下载!
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
Al大模型机器人
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
基于颜色变化水凝胶的集成微流控压力传感






 工商网监
工商网监
评论