 基于SPAD的高性能3D ToF深度传感器输出亚毫米级精度的点云
基于SPAD的高性能3D ToF深度传感器输出亚毫米级精度的点云
特殊的芯片设计让VI4331极大的提高测距精度和探测距离,实现精巧而全面的测量与感知。
搭载高速MIPI接口,拥有全直方图输出的强悍性能,可满足客户多样的场景需求
VI4331实现小体积、大视角、高性价比,为客户提供高性能、低功耗的解决方案。
随着机器视觉、自动驾驶等颠覆性技术的逐步发展,采用3D相机进行物体识别、行为识别、场景建模的相关应用越来越多。先进的3D相机技术使机器人能够“看到”周围的世界,可以说3D相机就是终端和机器人的眼睛。
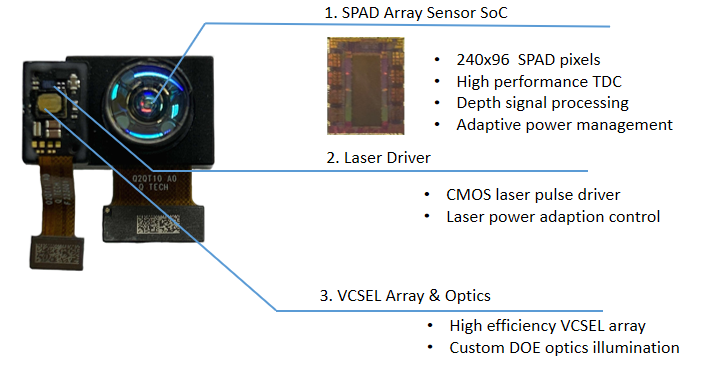
业界领先dToF芯片设计公司芯视界宣布,推出全新基于单光子探测技术的3D ToF深度传感器—VI4331。该传感器分辨率高达240×96像素,支持水平120˚广视场角,并拥有30fps高帧率,非常适用于扫地机室内建模(SLAM)与避障、行为检测、安检监控等应用。
芯视界研发部首席架构师Ben表示:
随着dToF在消费电子领域的普及,我们认为以SPAD为首的dToF技术路线会成为3D深度传感与机器视觉的主流。
VI4331是集合芯视界在dToF领域多年的改良与创新成果,设计在拓展量程的同时也提升测距精度与支持直方图的功能,为多深度场景环境下的3D建图与定位 (SLAM)提供精确的深度讯息。
高性能、低功耗,新一代VI4331全面升级
VI4331采用特殊芯片结构设计,再加上相应的匹配算法,使其基于上一代产品VI4330性能有显著提升,尤其是在探测距离与测距精度上有了突破性进展,更完美的解决机器人导航,避障等痛点问题。
VI4331通过片上集成电源管理模块、高性能TDC、高速DSP运算模块,可实现23K点的深度点云信息。
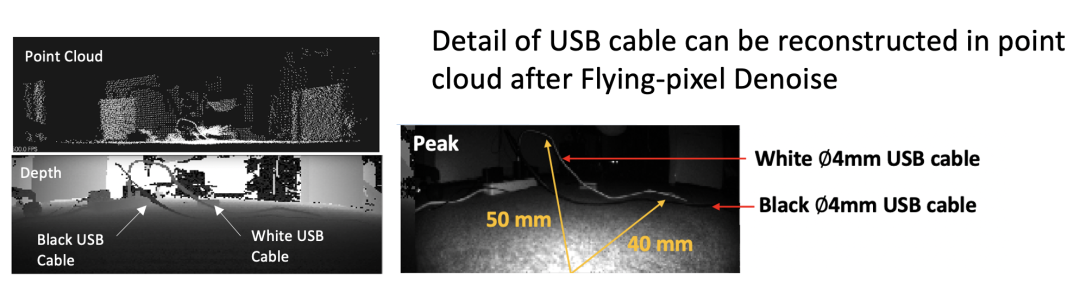
采用芯视界特有Gen2 DSP 深度深度信号处理模块, 可输出亚毫米级精度的深度点云信息。
拥有超强的抗阳光能力,在正常应用场景下的探测距离,可高达到12m。
模组说明
更多性能升级
VI4331搭载高速MIPI接口, 可支持30fps的深度影像信息输出。同时拥有全直方图输出功能, 满足客户多样的场景应用需求。
VI4331感光阵列支持一维单向扫描, 芯片搭载4组激光驱动信号,每一组可对应1/4 影像阵列的激光驱动信号。激光驱动信号可与内部传感器扫描时间同步,搭配寻址式激光器,能完美实现固态扫描方案。
应用场景
静态点云效果
人像动态深度效果
日前,芯视界已有合作方案商采用VI4331做出消费级、全固态面阵3D dToF激光雷达产品。
该产品将导航与避障功能合二为一,不仅可以实时输出用于导航定位的3D点云(导航定位帧),最高可达16线,距离可达10米;同时还能输出大分辨率、大视野,用于近距避障的高质量3D点云(避障识别帧),视场角FOV高达H120° x V50°。
审核编辑:刘清
-
传感器
+关注
关注
2557文章
51930浏览量
760066 -
机器视觉
+关注
关注
163文章
4462浏览量
121499 -
TOF
+关注
关注
9文章
490浏览量
36809 -
tof传感器
+关注
关注
2文章
106浏览量
14935
原文标题:芯视界推出基于SPAD的高性能3D ToF深度传感器,输出亚毫米级精度的点云
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
光谱传感器:工业轮廓扫描的毫米级精度革新
安森美这款iToF传感器让3D深度测量技术轻松落地

国产替代新篇章:领麦微红外测温传感器赋能3D打印精准制造
3D打印助力磁致伸缩位移传感器开发
领麦微红外测温传感器在小型光敏3D打印机中的创新应用

星宸科技拟融合ToF和ISP/SoC技术,推出3D感知智能化系统解决方案
TMAG5170 具有 SPI 接口的高精度 3D 线性霍尔效应传感器数据表

TMAG5170-Q1 具有 SPI 接口的高精度3D线性霍尔效应传感器数据表
TMAG5173-Q1具有I2C接口的高精度3D霍尔效应传感器数据表
TMAG5170D-Q1具有SPI接口的双芯片高精度3D线性霍尔效应传感器数据表
微视传感高性能3D视觉产品亮相2024上海机器视觉展
3D霍尔效应位置传感器的基本原理及其应用案例





 工商网监
工商网监
评论