 PI调节器的概念及设计
PI调节器的概念及设计
如何从零开始设计带有保护和限幅功能的闭环PI调节器硬件电路。
1 PI调节器概念
PI调节器是工业过程控制中常用的有源校正装置。
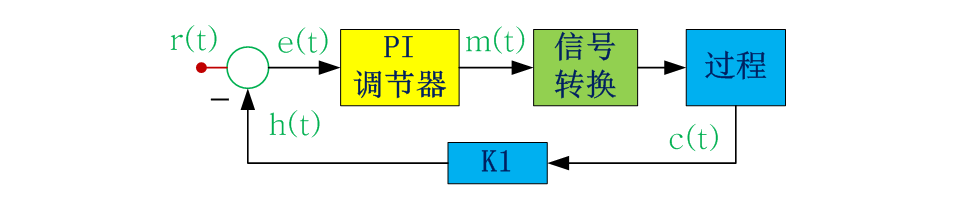
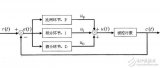
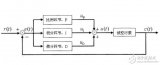
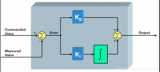
PI控制器的组成为给定值控制单元,PI单元,信号转换单元三个部分。
给定值单元接收工业控制过程的测量量c(t)和控制装置的给定量r(t)。给定值可以为本机内部给定值(属于本地控制范畴)或设备外部给定值(属于远程控制范畴),PI单元接受给定值控制单元产生的误差信号e(t),并按已知设定的控制参数输出闭环控控制信号m(t),信号转换单元用于将m(t)信号转换为控制设备所接受的信号变化规律和数值范围,驱动控制执行元件动作,从而达到自动控制的目的。
2 PI调节器的硬件实现
设给定控制信号r(t)是电压值,控制过程输出值c(t)与给定控制信号电压值之间呈现固定的比例关系K1,h(t)=K1c(t),当r(t)=h(t)时,e(t)=0,PI调节器输出保持当前值m(t),控制过程输出保持c(t)不变。
2.1 PI调节器电路
误差信号的产生是输入信号与反馈信号之间相减所产生的,因此,控制误差信号的产生电路实际上是用硬件电路实现两个信号的减法电路结构。
硬件给定积分器输出信号Uob相对于公共端电压为负值,当PI调节器的输入信号由给定积分器提供时,输入量r(t)是小于0的电压量;
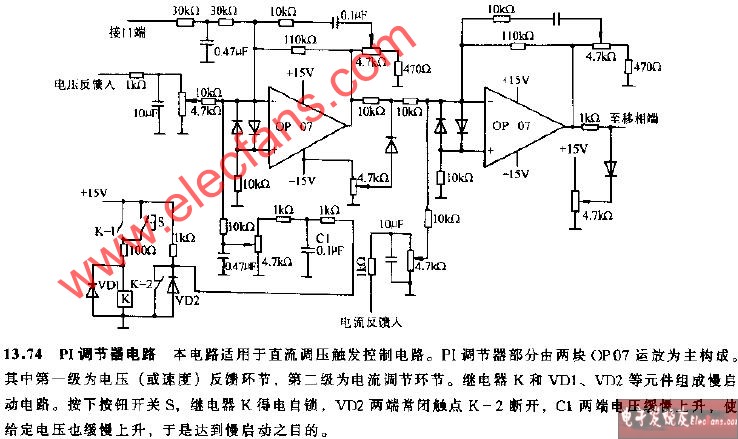
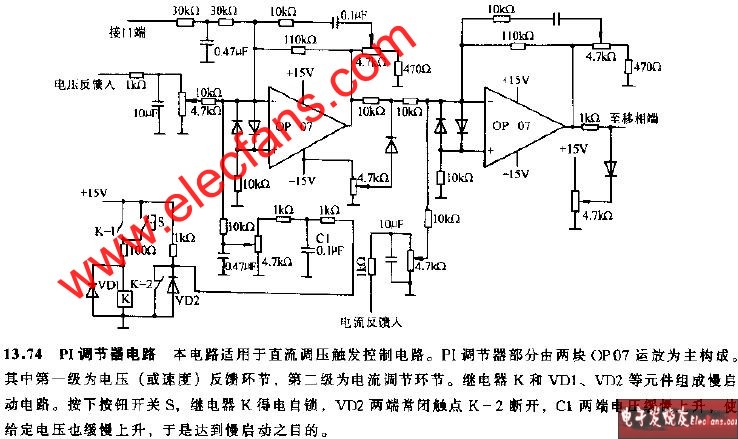
反馈信号通常是通过电压霍尔传感器的输出电压信号,该信号相对于公共端电压为正值,当利用加法电路实现两个信号相加时,获得的结果为两个电压信号相减。通常带有误差输入的比例积分电路如下图所示:
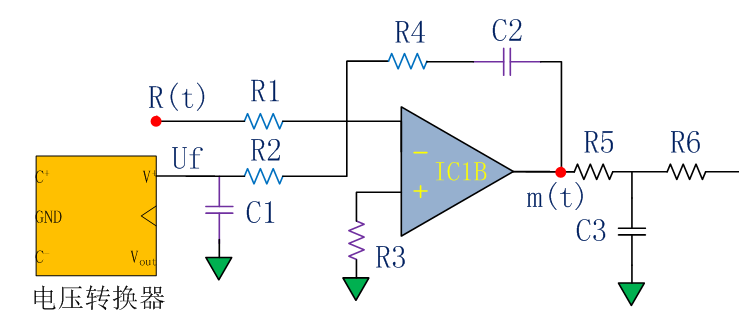
列写电路方程,求输出M与输入电压R,Uf之间的关系:
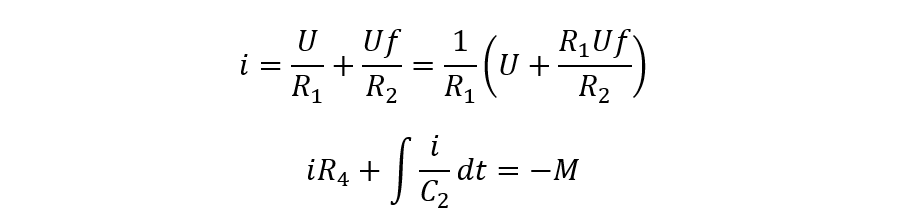
把方程中的电流变量消掉:

设误差信号e(t)为:

则输出电压M信号与输入误差信号E之间的关系:

设Kp=R4/R1为比例系数,Ti=R1C2为积分时间常数。则上式可简化为标准的比例积分公式:

把时域比例积分方程式两侧同时求取零状态下拉氏变换:

用传递函数形式表示E(s)与M(s)之间的关系:

把Kp=R4/R1,Ti=R1C2带入方程中:

2.2 抑制PI调节器的低频信号积分:
对于积分环节,当输入误差信号E频率很低,在一段时间内接近于直流信号时,误差信号会使得积分器始终在一个电流方向累计,当累积时间相当长,会使得积分器输出饱和。积分饱和现象在控制系统中必须要避免发生,否则系统会出现各种意想不到的现象,甚至会使得控制系统损耗。
如何能够抑制低频信号积分,而又能保证高频信号的正常积分是一个非常具有实际意义的问题。
下面把PI调节器进行化简,输入信号用误差信号代替。
在资料中,介绍了一种PI积分电路并联一个电阻Rf的方法来抑制低频信号的积分饱和,现在来分析一下这个电路。
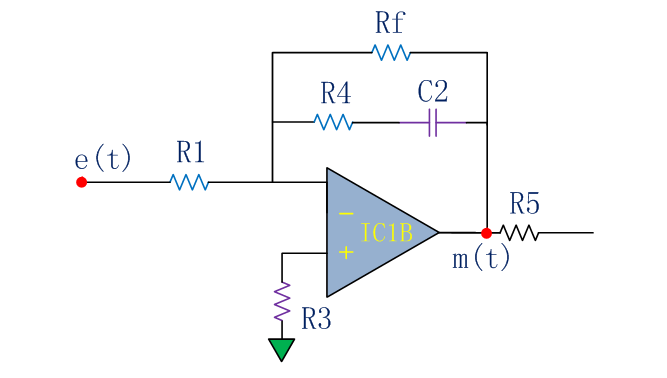
把电容C2用复数阻抗表示,求取输入信号E(s)与输出信号M(s)之间的传递函数:

化简后获得传递函数:

对比两种情况下,输出信号M(t)在t趋于无穷大时的值。
假设e(t)是一个单位阶跃信号,则e(t)的拉氏变换为E(s)=1/s。上述等式应用终值定理求m(t):
不带电阻Rf的情况下,PI调节器输出值m(t):


带电阻Rf的情况下,PI调节器输出值m(t):
比较后得出结论:在单位阶跃误差输入信号作用下,不带低频抑制电阻Rf时,PI调节器输出值趋于-∞,而带有低频抑制电阻Rf的电路,PI调节器输出值为-Rf/R1。当Rf=R1时,m(t)=-e(t),对于低频或直流信号,带有Rf电阻的PI调节器更像一个比例调节器,积分功能不起作用。当信号角频率ω>1/(C2(R4+Rf))时,输出特性才表现为积分特性。
2.3 防止积分反向
从两个方面来防止积分反向:1 电容C2的电压反向,2 运放输出电压反向。
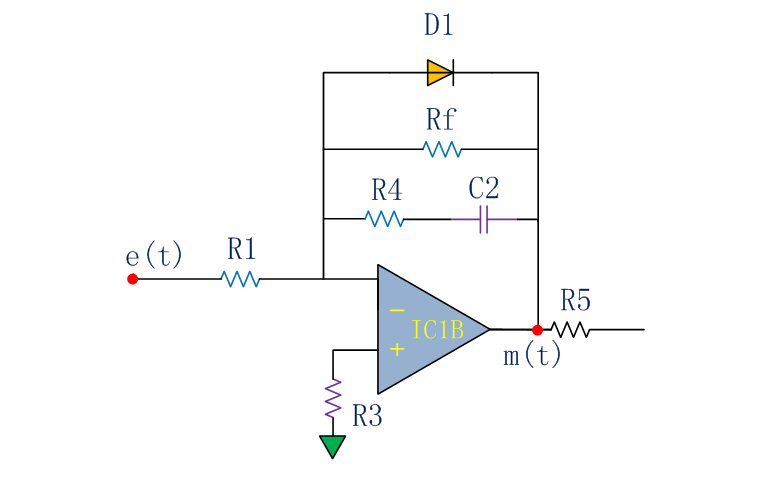
电容电压反向的抑制的意义:
1 当e(t)>0时,电容C2反向充电,增加一个二极管D1,当发生Uc2电压反向的时候,二极管D1导通,使得Uc2电压不进一步上升,被钳位在二极管压降0.7V。
2 当e(t)的极性被更正后,电容C2的电压能够快速的由反向充电转变为正向充电。
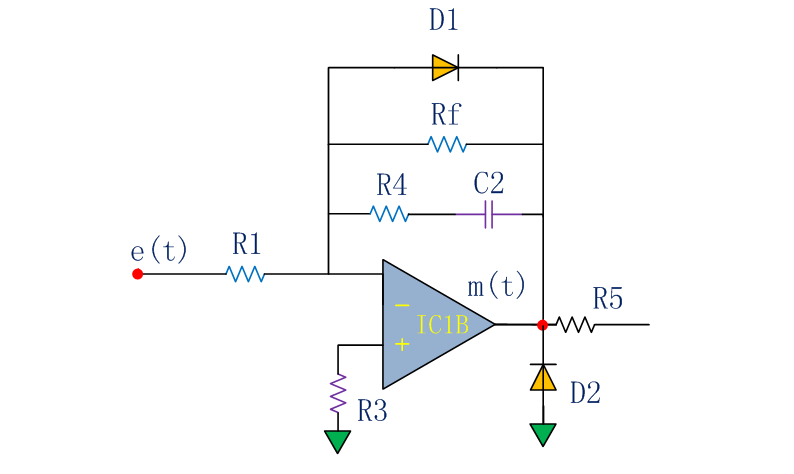
运放输出电压反向的抑制比较简单,在输出端反向并联一个二极管D2,当m(t)<0时,二极管D2导通,使得运放输出电压钳位到二极管D2端压降-0.7V处。
2.4 PI调节器输出限幅
当PI调节器输出值太大时,会发生设备功率过大而损坏情况,通常限幅输出时必须考虑的硬件设计问题。
比较简单实用的限幅方式还是二极管钳位电路限幅。
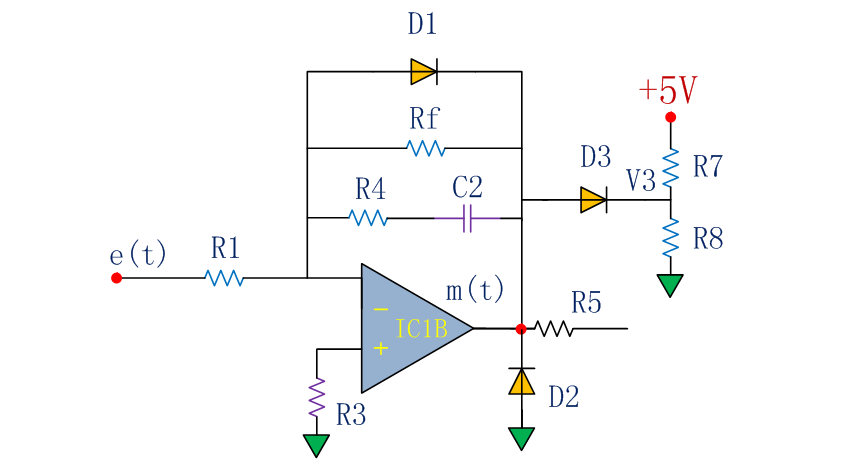
在调节器输出端接二极管D3和分压电阻R7,R8组成电压钳位电路。

当m(t)>V3+0.7时,二极管D3导通,运放输出电压m(t)=V3+0.7.
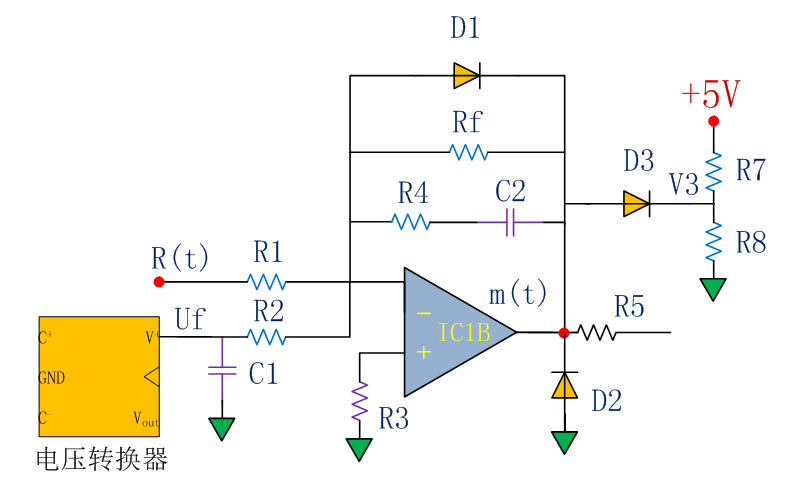
至此获得完整的带有保护和限幅功能的PI调节器电路图:
3 信号转换
许多工程设备控制过程与调节器输出值之间是负相关性,即调节器输出值最大时,往往是控制过程需要输入最小值的情况,反之,调节器输出值为零的时候,控制过程往往需要输入最大值。电压信号转换曲线类似于y=-kx+b图形:
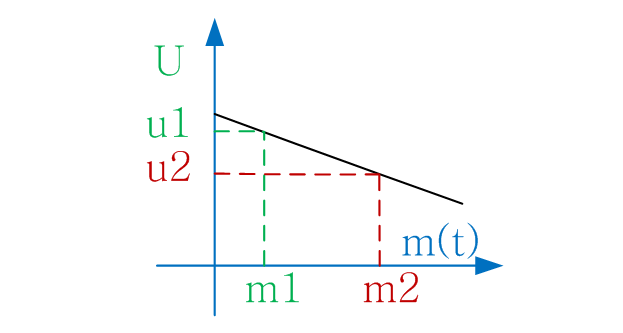
对于这种过程控制,需要对调节器的输出值进行变换后才能输入给控制过程。处理这种信号曲线,首先要对信号u进行偏移,然后让信号m按一定比例k反向,再和偏移量叠加。
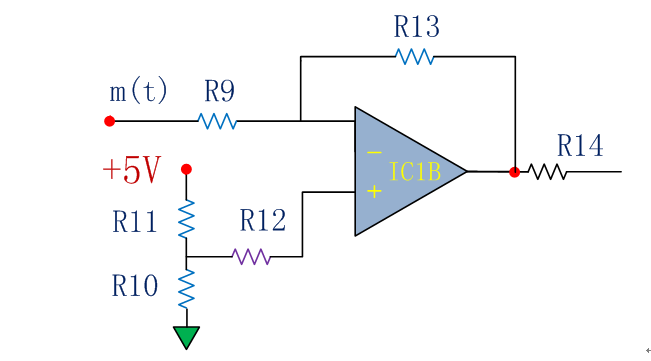
电阻R10,R11用来实现输出电压的偏移,电阻R9和R13用来实现信号m(t)的反向比例放大。
设偏移电压为Ub,根据运放的虚断性质,流入运放的电流为0,因此R12不影响Ub的计算,则Ub等于R10,R11对5V电压的分压值:

根据运放的虚短性质,运放同向输入端和反向输入端电压为Ub,因此,可以计算电路的输出值U:

把公式整理后,获得U的公式:

4 结论
通过上述的分析,我们可以发现,这个PI调节器的电路设计是按照方框图的顺序进行的,如果把每一部分设计连接起来组成一个完整的方框图,就是整个系统的控制电路图;这个控制电路图是带有负反馈,保护和积分限幅,电平转换功能的控制系统。
-
PI
+关注
关注
12文章
215浏览量
112195 -
调节器
+关注
关注
5文章
847浏览量
46411 -
工业控制
+关注
关注
37文章
1451浏览量
85828 -
硬件电路
+关注
关注
39文章
243浏览量
29216 -
PI控制器
+关注
关注
1文章
25浏览量
11379
发布评论请先 登录
相关推荐
PI电流调节器的工作原理和种类
FOC电机控制中的PI调节器
一种新的PI调节器在交流解耦控制系统中的应用
pi调节器原理_pi调节器电路图_pi调节器参数作用
pi调节器的输入和输出_pi调节器的传递函数
PI调节器介绍及设计
永磁同步电机磁场定向控制转速环PI调节器参数整定

永磁同步电机磁场定向控制电流环PI调节器的参数整定
永磁同步电机磁场定向控制转速环PI调节器的参数整定





 工商网监
工商网监
评论