 高速只是第一步,工业视觉传感器精度亟待提升
高速只是第一步,工业视觉传感器精度亟待提升
电子发烧友网报道(文/周凯扬)在工业自动化进程的持续推动下,行业技术已经开始朝着智能化、高度集成化和数字化的方向发展了,尤其是工业视觉技术。为了满足这三大要求,工业视觉必须从图像获取、处理以及理解上都做到更高的精度,其中处理和理解通过如今的边缘处理器和机器视觉算法,已经满足了精度要求。至于图像获取的精度,则仍与视觉传感器息息相关。
所以在工业视觉传感器领域,无论是传统的CMOS图像传感器,还是开始被广泛应用的激光雷达,都开始朝着高精度、高速率的方向发展。而高速率这块的技术路线我们基本都已经知晓了,比如CMOS图像传感器追求全局快门,固态和机械激光雷达都开始追求更快的扫描速度。为了实现更高的精度,图像传感器和激光雷达也在不断推出芯片,从设计上寻求创新。
图像传感器-高灵敏度与高像素
与车规图像传感器不同,工业场景下的CMOS往往没有动辄120dB高动态范围,或LED频闪抑制这一类的需求,反倒是全局快门带来的高速特性常被视为首要要求。但为了进一步提升工业自动化的效率,同时也提高生产良率,工业图像传感器还是有着不少其他参数上的要求。
相对汽车的大光比户外环境,工业场景绝大多数位于室内,所以这才没有较高的动态范围要求。可室内环境通常没有实现理想的光源全覆盖,这就需要图像传感器的灵敏度越高越好。而相对于我们常见的彩色图像传感器来说,黑白与单色图像传感器在灵敏度的性能往往会更好,从而拥有更加优秀的弱光精度表现。
除了这一优势外,在分辨率相同的情况下,黑白版本的图像传感器在检测图像边缘这样的任务上效果更好,同时由于舍弃了颜色信息,读取速度可以进一步提高,对于工业线阵相机的检测效率来说有着明显的提高。
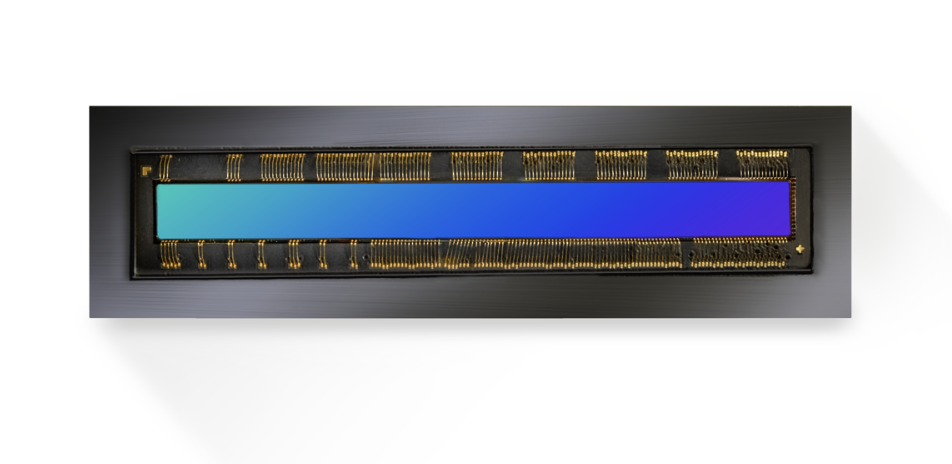
SC430LA / 思特威
思特威就在去年推出了他们的首款线阵CMOS图像传感器SC430LA,并采用了背照式和全局快门的设计方案,实现了4K的分辨率。思特威的SC430LA就分为黑白和彩色两个版本,其中黑白版本还有1线、2线和3线3种工作模式,1线模式下可以达到200kHz的行频。而如果是在全彩成像的工业视觉应用中,SC430LA的彩色版本也支持传统的Bilinear和先进的Trilinear模式,后者可以保留更多的色彩信息,提供更好的图像品质,满足高精度工业视觉传感器的需求。
我们在工业视觉场景中其实看到超高像素的图像传感器不多,这是因为在不少场景中,精度和速度并非可以兼得的两大参数。而过去的不少应用场景,由于图像处理和理解技术所限,高精度并非第一要义。
可为了追求更高的精度,尤其是在长距离识别和大规模物体识别的应用中,其实高分辨率还是一个绕不开的话题。至于如何在保证实现更高分辨率的基础上,维持一个较高的速率,才是解决问题的关键。
Teledyne给出了一个分辨率与速度兼并的答案,那就是具备6700万像素的Emerald 67M。如此高的像素量已经完整覆盖了8K的分辨率,可以随意通过ROI特性来在单张高分辨率图像中捕捉到更多的物体。可如此大的数据量通常意味着读出速度会面临着巨大的考验,但Teledyne的Emerald 67M依旧实现了超高的性能。
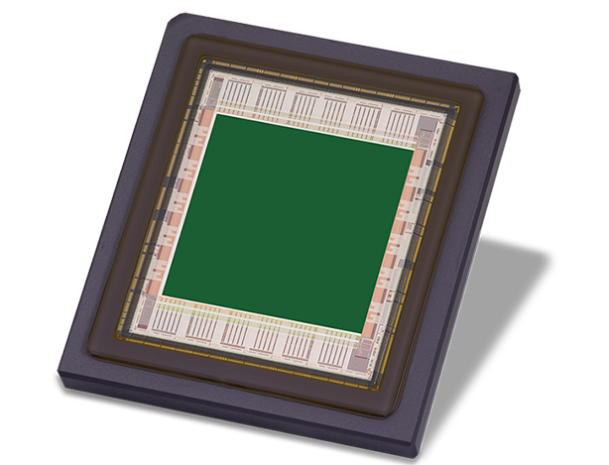
Emerald 67M / Teledyne
Emerald 67M分为高速版和超高速版,其中超高速版可以在10bit输出下实现65fps的超高帧率,读出噪声却只有2.5e-,500nm下的量子效率做到了66%。要知道超高像素的传感器往往在灵敏度上往往是处于劣势的,Emerald 67M在提供6700万像素的同时,依旧保留了供工业视觉应用的高灵敏度和高速特性。
激光雷达-新架构和高线数
一众固态雷达中,在提升激光雷达精度的方法上最为特殊的可能是Ouster的数字激光雷达。Ouster采用了半导体化设计的方式,将光电器件全部集成到了芯片之中,并通过芯片工艺和设计来提高激光雷达精度。例如他们基于40nm工艺打造的L2和L2X芯片,以及使用全新工艺打造的L3芯片。
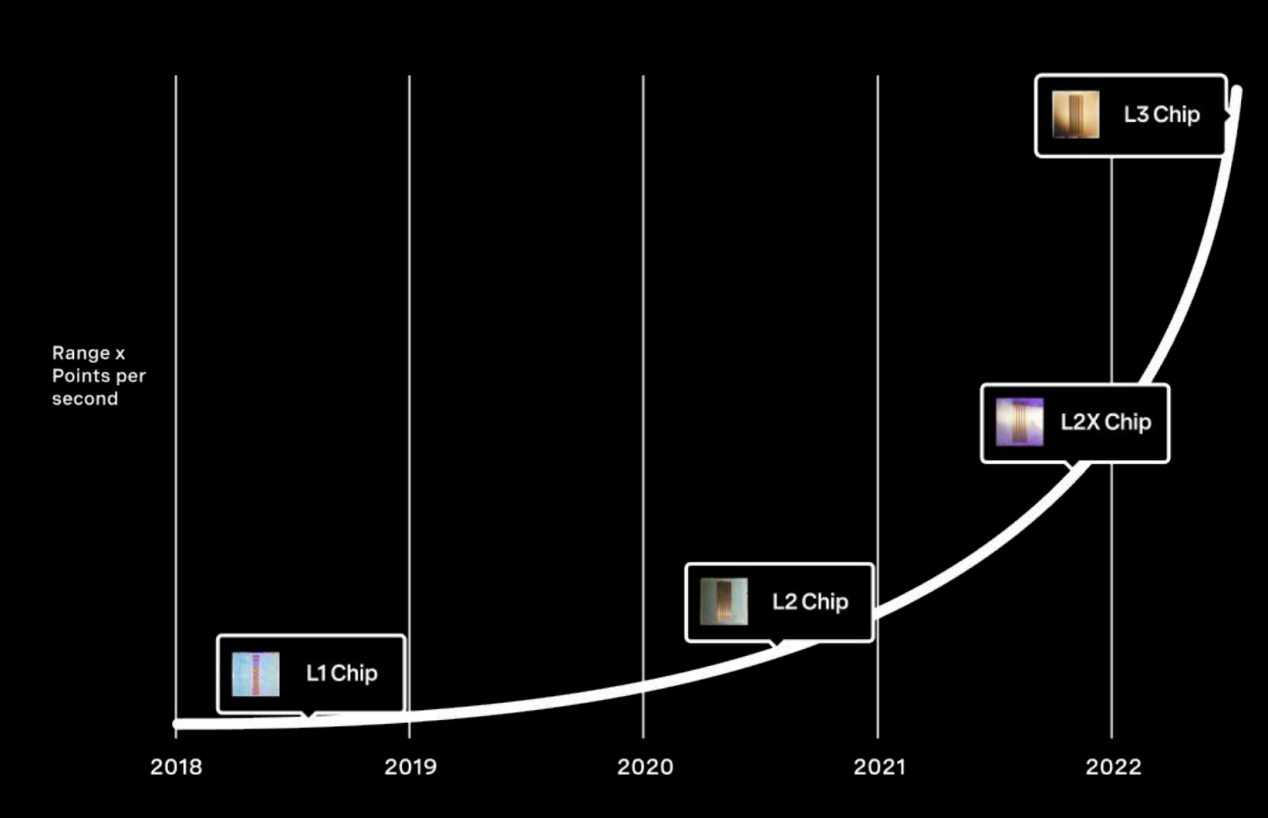
Ouster数字激光雷达芯片路线图 / Ouster
从2017年的L1芯片到2019年的L2芯片,Ouster将其激光雷达芯片的工艺从130nm升级至40nm,把激光雷达的分辨率从64线提高至128线。如今REV7系列数字激光雷达所用的L3芯片,已经做到了单芯片1.25亿的晶体管数量和520万的点频速度。
如此高的集成度也让Ouster可以在可靠性上更进一步,比如做到IP68乃至IP69K的防护等级,也比其他机械激光雷达更容易解决冲击与振动带来的干扰,更适合复杂的工业场景,为AMR等工业机器提供更高的安全性,并减少停机时间。
从Ouster的例子来看,他们通过提高数字激光雷达芯片的集成度来实现更高的线数。在激光雷达领域,往往线数决定了角分辨率,也就决定了精度,所以128线数以上的激光雷达一般都被称为高清激光雷达。
光秒科技在去年推出了首款1024线的超高清混合固态激光雷达,GM1024。其中GM1024-A更是可以实现1024*1024线数和20Hz的频率,在120°的水平视场角上做到0.088°的角分辨率,在25°的垂直视场角上做到0.024°的角分辨率。再加上GM1024本身采用过的是1550nm的波长,如此高的分辨率可以在远距离探测对象上实现前所未有的精度。
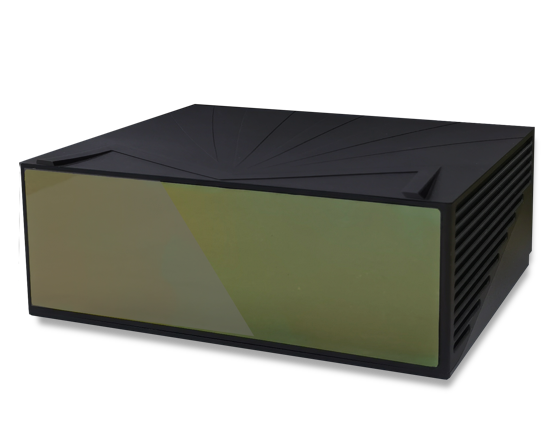
GM1024激光雷达 / 光秒科技
虽然该激光雷达集成了100Base-T1车载以太网接口,但其IP67防水防尘的物理设计以及额外的TpyeC、HDMI与1/4螺纹接口,意味着其同样可以面向工业自动化目标识别与抓取。拥有如此高的精度,GM1024无疑可以灵活运用在不同的工业场景内。例如长距离的作业环境中,GM1024可以在远处就完成对象的识别,解决了因为工业场景中高速流水线带来的感知滞后问题。
写在最后
随着半导体产业朝着更先进的工艺发展,工业视觉传感器的高精度势必会成为与高速并列的重要需求,尤其是在芯片封装检测之类的高精密工作场景中。图像传感器也在缓慢地推进自身制造工艺,所以速度与精度两手抓也是一个良性循环,在保证高生产效率的同时,仍然能够提供让人眼前一亮的性能。
虽然如今不少激光雷达厂商都在追求车规级量产,但依赖单一市场对于产品而言存在不少的风险。Ouster等机械激光雷达厂商在这方面就做得要更好一些,从Ouster上季度的财报来看,其营收占比中38%来自工业领域,37%来自机器人领域。虽然机械激光雷达上车进度不佳,但对于工业视觉领域仍是一个吃香的选择,况且不少激光雷达厂商都开始多技术路线布局。相信如果更多的激光雷达厂商入局工业视觉的话,其成本和精度会再度迎来优化。
所以在工业视觉传感器领域,无论是传统的CMOS图像传感器,还是开始被广泛应用的激光雷达,都开始朝着高精度、高速率的方向发展。而高速率这块的技术路线我们基本都已经知晓了,比如CMOS图像传感器追求全局快门,固态和机械激光雷达都开始追求更快的扫描速度。为了实现更高的精度,图像传感器和激光雷达也在不断推出芯片,从设计上寻求创新。
图像传感器-高灵敏度与高像素
与车规图像传感器不同,工业场景下的CMOS往往没有动辄120dB高动态范围,或LED频闪抑制这一类的需求,反倒是全局快门带来的高速特性常被视为首要要求。但为了进一步提升工业自动化的效率,同时也提高生产良率,工业图像传感器还是有着不少其他参数上的要求。
相对汽车的大光比户外环境,工业场景绝大多数位于室内,所以这才没有较高的动态范围要求。可室内环境通常没有实现理想的光源全覆盖,这就需要图像传感器的灵敏度越高越好。而相对于我们常见的彩色图像传感器来说,黑白与单色图像传感器在灵敏度的性能往往会更好,从而拥有更加优秀的弱光精度表现。
除了这一优势外,在分辨率相同的情况下,黑白版本的图像传感器在检测图像边缘这样的任务上效果更好,同时由于舍弃了颜色信息,读取速度可以进一步提高,对于工业线阵相机的检测效率来说有着明显的提高。
SC430LA / 思特威
思特威就在去年推出了他们的首款线阵CMOS图像传感器SC430LA,并采用了背照式和全局快门的设计方案,实现了4K的分辨率。思特威的SC430LA就分为黑白和彩色两个版本,其中黑白版本还有1线、2线和3线3种工作模式,1线模式下可以达到200kHz的行频。而如果是在全彩成像的工业视觉应用中,SC430LA的彩色版本也支持传统的Bilinear和先进的Trilinear模式,后者可以保留更多的色彩信息,提供更好的图像品质,满足高精度工业视觉传感器的需求。
我们在工业视觉场景中其实看到超高像素的图像传感器不多,这是因为在不少场景中,精度和速度并非可以兼得的两大参数。而过去的不少应用场景,由于图像处理和理解技术所限,高精度并非第一要义。
可为了追求更高的精度,尤其是在长距离识别和大规模物体识别的应用中,其实高分辨率还是一个绕不开的话题。至于如何在保证实现更高分辨率的基础上,维持一个较高的速率,才是解决问题的关键。
Teledyne给出了一个分辨率与速度兼并的答案,那就是具备6700万像素的Emerald 67M。如此高的像素量已经完整覆盖了8K的分辨率,可以随意通过ROI特性来在单张高分辨率图像中捕捉到更多的物体。可如此大的数据量通常意味着读出速度会面临着巨大的考验,但Teledyne的Emerald 67M依旧实现了超高的性能。
Emerald 67M / Teledyne
Emerald 67M分为高速版和超高速版,其中超高速版可以在10bit输出下实现65fps的超高帧率,读出噪声却只有2.5e-,500nm下的量子效率做到了66%。要知道超高像素的传感器往往在灵敏度上往往是处于劣势的,Emerald 67M在提供6700万像素的同时,依旧保留了供工业视觉应用的高灵敏度和高速特性。
激光雷达-新架构和高线数
一众固态雷达中,在提升激光雷达精度的方法上最为特殊的可能是Ouster的数字激光雷达。Ouster采用了半导体化设计的方式,将光电器件全部集成到了芯片之中,并通过芯片工艺和设计来提高激光雷达精度。例如他们基于40nm工艺打造的L2和L2X芯片,以及使用全新工艺打造的L3芯片。
Ouster数字激光雷达芯片路线图 / Ouster
从2017年的L1芯片到2019年的L2芯片,Ouster将其激光雷达芯片的工艺从130nm升级至40nm,把激光雷达的分辨率从64线提高至128线。如今REV7系列数字激光雷达所用的L3芯片,已经做到了单芯片1.25亿的晶体管数量和520万的点频速度。
如此高的集成度也让Ouster可以在可靠性上更进一步,比如做到IP68乃至IP69K的防护等级,也比其他机械激光雷达更容易解决冲击与振动带来的干扰,更适合复杂的工业场景,为AMR等工业机器提供更高的安全性,并减少停机时间。
从Ouster的例子来看,他们通过提高数字激光雷达芯片的集成度来实现更高的线数。在激光雷达领域,往往线数决定了角分辨率,也就决定了精度,所以128线数以上的激光雷达一般都被称为高清激光雷达。
光秒科技在去年推出了首款1024线的超高清混合固态激光雷达,GM1024。其中GM1024-A更是可以实现1024*1024线数和20Hz的频率,在120°的水平视场角上做到0.088°的角分辨率,在25°的垂直视场角上做到0.024°的角分辨率。再加上GM1024本身采用过的是1550nm的波长,如此高的分辨率可以在远距离探测对象上实现前所未有的精度。
GM1024激光雷达 / 光秒科技
虽然该激光雷达集成了100Base-T1车载以太网接口,但其IP67防水防尘的物理设计以及额外的TpyeC、HDMI与1/4螺纹接口,意味着其同样可以面向工业自动化目标识别与抓取。拥有如此高的精度,GM1024无疑可以灵活运用在不同的工业场景内。例如长距离的作业环境中,GM1024可以在远处就完成对象的识别,解决了因为工业场景中高速流水线带来的感知滞后问题。
写在最后
随着半导体产业朝着更先进的工艺发展,工业视觉传感器的高精度势必会成为与高速并列的重要需求,尤其是在芯片封装检测之类的高精密工作场景中。图像传感器也在缓慢地推进自身制造工艺,所以速度与精度两手抓也是一个良性循环,在保证高生产效率的同时,仍然能够提供让人眼前一亮的性能。
虽然如今不少激光雷达厂商都在追求车规级量产,但依赖单一市场对于产品而言存在不少的风险。Ouster等机械激光雷达厂商在这方面就做得要更好一些,从Ouster上季度的财报来看,其营收占比中38%来自工业领域,37%来自机器人领域。虽然机械激光雷达上车进度不佳,但对于工业视觉领域仍是一个吃香的选择,况且不少激光雷达厂商都开始多技术路线布局。相信如果更多的激光雷达厂商入局工业视觉的话,其成本和精度会再度迎来优化。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
视觉传感器
+关注
关注
3文章
254浏览量
23015
发布评论请先 登录
相关推荐
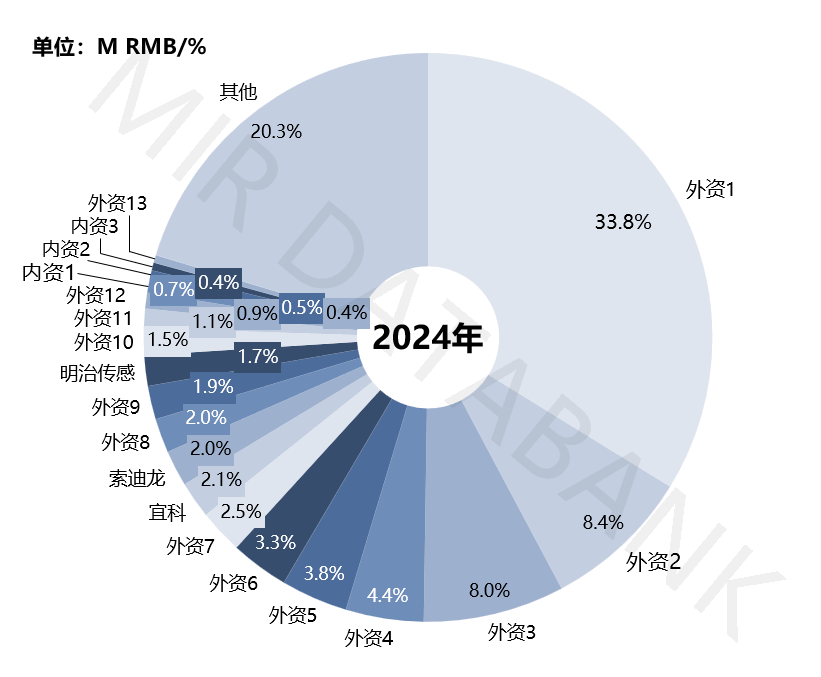
国产传感器市场洗牌加速,深圳这家企业登顶第一!
第四季度市场进一步收缩至25.98亿元,同比下降9.4%。 图片来源于MIR睿工业 尽管行业面临下行压力,国产品牌明治传感逆势崛起,以光电类传感器为核心突破口,市占率跻身行业第三,
浅谈如何选择合适的传感器
:传感器可以测量多种物理量,如温度、压力、光强、位移、重量等。明确需要测量的物理量是选择传感器的第一步。 2. 测量范围:根据应用场景选择合适的测量范围。例如,如果应用场景的温度范围为-20°C至50°C,那么应选择
Sony偏振传感器加持 Blackfly S工业相机突破视觉成像反光难题
Q为什么采用传感器偏振?A:视觉系统一直都在试图克服玻璃、塑料和金属等反光表面产生的动态或多余光线、反射、朦胧和眩光影响。TeledyneFLIR的BlackflyS机器视觉工业相机具

选择工业自动化传感器的十大技巧
的选择,成为了一个需要深入探讨的问题。本文将介绍选择工业自动化传感器的十大技巧,帮助读者更好地理解和应用这些技术。 一、明确测量参数 选择传感器
高精度压力传感器与普通传感器的区别
在工业自动化、航空航天、医疗设备和环境监测等领域,压力传感器扮演着至关重要的角色。它们能够测量并监控压力变化,为系统提供必要的数据支持。随着技术的发展,压力传感器的种类和性能也在不断提升
气压传感器如何提高测量精度
,包括机械式、电容式、电阻式和压电式等。每种类型的传感器都有其特定的应用场景和优缺点。选择合适的传感器类型是提高测量精度的第一步。 机械式传感器
精密制造的革新:光谱共焦传感器与工业视觉相机的融合
微米级别测量上的局限,还极大地提升了检测效率和准确性。 精密制造的革新:光谱共焦传感器与工业视觉相机的融合 技术融合背景 在现代精密制造行业中,对小型和高
VS高精度电压传感器
VS系列电压传感器是一种量程覆盖35kV及以下的直流、交流、周期性脉冲以及各种不规则波形的电压传感器,精度高达0.05%FS、带宽高达100kHz,可满足宽频带、高
郭光灿院士:迈出中国量子计算“软实力”第一步
,是中国量子计算“软实力”迈出的第一步。量子计算是国际前沿科技,也是中国未来产业之一。当前,中国量子计算科技“硬实力”已居全球第一方阵,中国是世界上第三个具备超导量


散热第一步是导热
进一步提高产品的使用寿命。
产品型号有多种规格可选择(导热系数1.0~5.0W/m.K)。
合肥傲琪电子的导热硅脂、导热硅胶片还应用于对芯片、主板、功率管(MOS)、变压器、模块、PCB板、铝基板
发表于 08-06 08:52

如何测量电流传感器的精度?
电流传感器是现代工业和电子设备中不可或缺的组件,它们负责监测和测量电路中的电流,确保系统的安全和效率。为了保证电流传感器的准确性,必须对其精度进行严格的测量。本文将详细介绍如何测量电流

4一20ma压力传感器如何检测好坏
检查是检测4-20mA压力传感器好坏的第一步。检查传感器的外观是否有明显的损伤、裂纹或变形。如果发现有损伤,可能会影响到传感器的性能和精度。





 工商网监
工商网监
评论