 纯python实现(一)Harris corner
纯python实现(一)Harris corner
本篇关于之前做的一个project的具体实现。常有一种遗憾,遇到很美的风景而你的镜头却不能全部将它收入“眼底”。现在许多手机上都有了全景模式,这个功能在一定程度上缓解了问题,但对于有些的同学比如说我依然会拍出“抖动”严重的画面。今天我要介绍的这个project就可以将多个单张不同角度的风景拼成一张大图。
效果如下:
首先使用Harris Corner特征检测器和sift描述符检测图像中的特征,并在其他图像中找到最佳匹配特征; 然后使用RANSAC 对齐照片(确定它们的重叠和相对位置),最后将生成的图像拼接到一个无缝的全景图中。
多张单图:





全景图:

首先基本步骤为:
- 进行角点检测,本文中将使用Harris corner detector方法进行角点检测。
- 进行兴趣点描述,构建sift descriptor。
- 两张图片之间进行兴趣点匹配
- 利用Ransac算法计算两张图片之间的homography(H矩阵)
- 根据H变换图片并将两张图片拼接在一起。
- 多次运行以上步骤,将所有图片进行拼接,最后获得全景图。
具体步骤:
Step1. Harris corner角点检测
A.计算图像x,y方向上的导数。
B.计算图像导数的协方差矩阵H。
H= 
通常,在计算协方差矩阵时,计算窗口或图像的小区域上的 ,
, 和
和 之和。为了获得更好的角点检测结果可以使用高斯加权窗口。使用det(H)/trace(H),其中det(H)为 计算每个点的Harris响应值。设置阈值找到并存储兴趣点位置。
之和。为了获得更好的角点检测结果可以使用高斯加权窗口。使用det(H)/trace(H),其中det(H)为 计算每个点的Harris响应值。设置阈值找到并存储兴趣点位置。
code:
def detectKeypoints(image):
#接收图像
image = image.astype(np.float32)
image /= 255.
height, width = image.shape[:2]
features = []
grayImage = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#转换成灰度图 计算Harris值
harrisImage, orientationImage = computeHarrisValues(grayImage)
#harrisImage=[harrisImage>np.average(harrisImage)]
#应用LocalMaxima算法进行特征筛选
harrisMaxImage =computeLocalMaxima(harrisImage)
#设置threshold将特征值进一步过滤,兴趣点数量进一步减少
threhold = 0.01*np.max(harrisImage)
for y in range(height):
for x in range(width):
if not harrisMaxImage[y, x]:
continue
f = cv2.KeyPoint()
f.size = 10
f.angle = orientationImage[y,x]
f.pt = (x,y)
f.response = harrisImage[y,x]
if(f.response>threhold):
features.append(f)
return features
Harris corner的部分
def computeHarrisValues(Image):
height, width = Image.shape[:2]
harrisImage = np.zeros(Image.shape[:2], dtype=float)
orientationImage = np.zeros(Image.shape[:2], dtype=float)
sobx = np.zeros(Image.shape[:2], dtype=float)
filters.sobel(Image, 1, sobx)
soby = np.zeros(Image.shape[:2], dtype=float)
filters.sobel(Image, 0, soby)
# sobx = filters.convolve(srcImage,sx,mode='reflect')
# soby = filters.convolve(srcImage,sy,mode='reflect')
Ix = sobx*sobx
Iy = soby*soby
Ixy = sobx*soby
Wxx = filters.gaussian_filter(Ix,sigma=0.5)
Wyy = filters.gaussian_filter(Iy,sigma=0.5)
Wxy = filters.gaussian_filter(Ixy,sigma=0.5)
harrisImage = Wxx*Wyy - Wxy*Wxy - 0.1*(Wxx+Wyy)*(Wxx+Wyy)
orientationImage = np.arctan2(soby,sobx)*(180) / np.pi
return harrisImage, orientationImage
结果展示:


-
检测器
+关注
关注
1文章
883浏览量
48334 -
图像
+关注
关注
2文章
1092浏览量
40961 -
Sift
+关注
关注
1文章
38浏览量
15296
发布评论请先 登录
用ADE XLall跑all Corner时 第一个Corner为什么总是会报错?
基于小波变换多尺度Harris角点检测算法
Harris加快信号处理FPGA验证
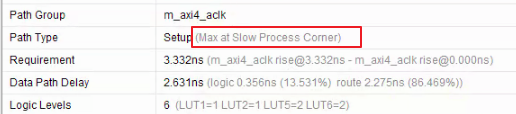
FPGA中的fast corner和slow corner介绍
UltraEM®的Corner Sweep仿真实例
Python实现OpenCV的安装与使用
TinyDB :一个纯Python编写的轻量级数据库
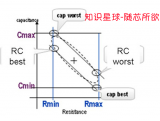
芯片后端signoff的RC corner指什么?
IBIS模型中的Corner参数处理

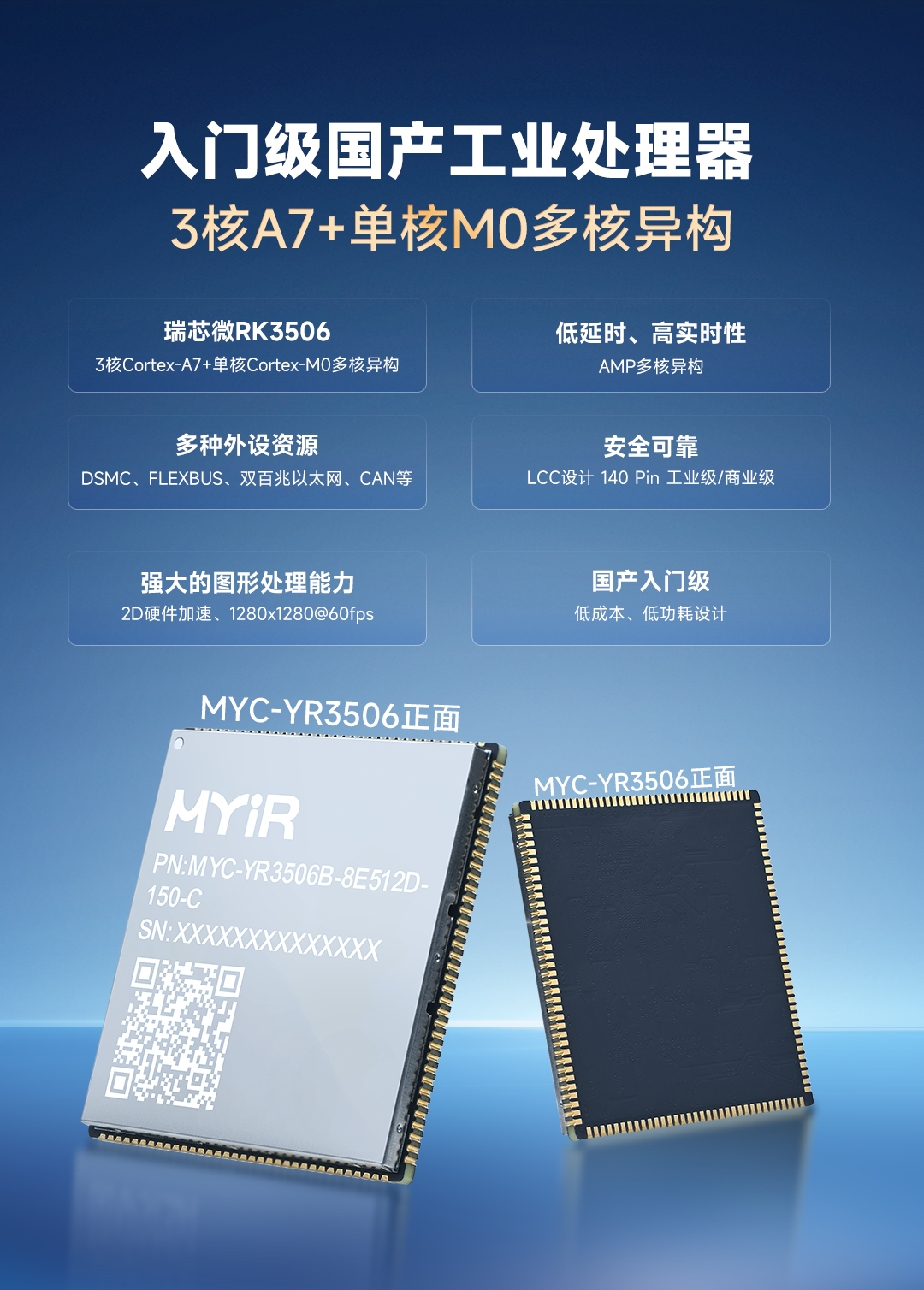
3核A7+单核M0多核异构,米尔全新低功耗RK3506核心板发布
近日,米尔电子发布MYC-YR3506核心板和开发板,基于国产新一代入门级工业处理器瑞芯微RK3506,这款芯片采用三核Cortex-A7+单核Cortex-M0多核异构设计,不仅拥有丰富的工业接口、低功耗设计,还具备低延时和高实时性的特点。核心板提供RK3506B/RK3506J、商业级/工业级、512MB/256MBLPDDR3L、8GBeMMC/256
搭建树莓派网络监控系统:顶级工具与技术终极指南!
树莓派网络监控系统是一种经济高效且功能多样的解决方案,可用于监控网络性能、流量及整体运行状况。借助树莓派,我们可以搭建一个网络监控系统,实时洞察网络活动,从而帮助识别问题、优化性能并确保网络安全。安装树莓派网络监控系统有诸多益处。树莓派具备以太网接口,还内置了Wi-Fi功能,拥有足够的计算能力和内存,能够在Linux或Windows系统上运行。因此,那些为L

STM32驱动SD NAND(贴片式SD卡)全测试:GSR手环生物数据存储的擦写寿命与速度实测
在智能皮电手环及数据存储技术不断迭代的当下,主控 MCU STM32H750 与存储 SD NAND MKDV4GIL-AST 的强强联合,正引领行业进入全新发展阶段。二者凭借低功耗、高速读写与卓越稳定性的深度融合,以及高容量低成本的突出优势,成为大规模生产场景下极具竞争力的数据存储解决方案。

芯对话 | CBM16AD125Q这款ADC如何让我的性能翻倍?
综述在当今数字化时代,模数转换器(ADC)作为连接模拟世界与数字系统的关键桥梁,其技术发展对众多行业有着深远影响。从通信领域追求更高的数据传输速率与质量,到医疗影像领域渴望更精准的疾病诊断,再到工业控制领域需要适应复杂恶劣环境的稳定信号处理,ADC的性能提升成为推动这些行业进步的重要因素。行业现状分析在通信行业,5G乃至未来6G的发展,对基站信号处理提出了极
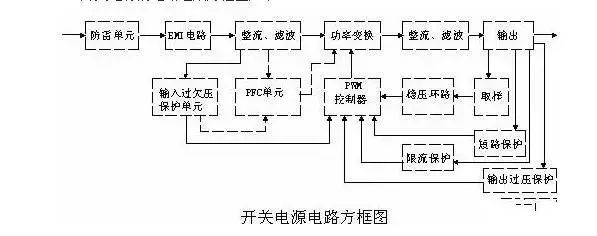
史上最全面解析:开关电源各功能电路
01开关电源的电路组成开关电源的主要电路是由输入电磁干扰滤波器(EMI)、整流滤波电路、功率变换电路、PWM控制器电路、输出整流滤波电路组成。辅助电路有输入过欠压保护电路、输出过欠压保护电路、输出过流保护电路、输出短路保护电路等。开关电源的电路组成方框图如下:02输入电路的原理及常见电路1AC输入整流滤波电路原理①防雷电路:当有雷击,产生高压经电网导入电源时
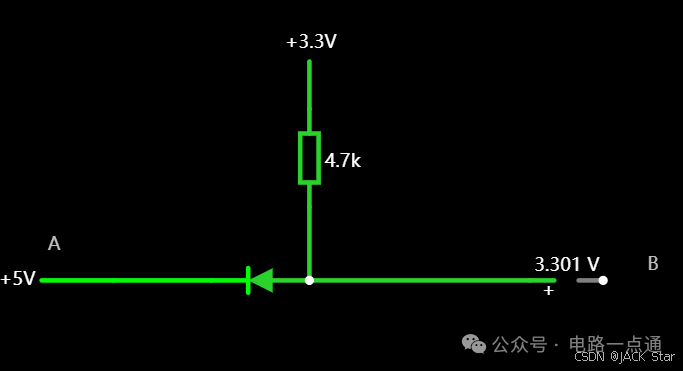
有几种电平转换电路,适用于不同的场景
一.起因一般在消费电路的元器件之间,不同的器件IO的电压是不同的,常规的有5V,3.3V,1.8V等。当器件的IO电压一样的时候,比如都是5V,都是3.3V,那么其之间可以直接通讯,比如拉中断,I2Cdata/clk脚双方直接通讯等。当器件的IO电压不一样的时候,就需要进行电平转换,不然无法实现高低电平的变化。二.电平转换电路常见的有几种电平转换电路,适用于

瑞萨RA8系列教程 | 基于 RASC 生成 Keil 工程
对于不习惯用 e2 studio 进行开发的同学,可以借助 RASC 生成 Keil 工程,然后在 Keil 环境下愉快的完成开发任务。

共赴之约 | 第二十七届中国北京国际科技产业博览会圆满落幕
作为第二十七届北京科博会的参展方,芯佰微有幸与800余家全球科技同仁共赴「科技引领创享未来」之约!文章来源:北京贸促5月11日下午,第二十七届中国北京国际科技产业博览会圆满落幕。本届北京科博会主题为“科技引领创享未来”,由北京市人民政府主办,北京市贸促会,北京市科委、中关村管委会,北京市经济和信息化局,北京市知识产权局和北辰集团共同承办。5万平方米的展览云集

道生物联与巍泰技术联合发布 RTK 无线定位系统:TurMass™ 技术与厘米级高精度定位的深度融合
道生物联与巍泰技术联合推出全新一代 RTK 无线定位系统——WTS-100(V3.0 RTK)。该系统以巍泰技术自主研发的 RTK(实时动态载波相位差分)高精度定位技术为核心,深度融合道生物联国产新兴窄带高并发 TurMass™ 无线通信技术,为室外大规模定位场景提供厘米级高精度、广覆盖、高并发、低功耗、低成本的一站式解决方案,助力行业智能化升级。

智能家居中的清凉“智”选,310V无刷吊扇驱动方案--其利天下
炎炎夏日,如何营造出清凉、舒适且节能的室内环境成为了大众关注的焦点。吊扇作为一种经典的家用电器,以其大风量、长寿命、低能耗等优势,依然是众多家庭的首选。而随着智能控制技术与无刷电机技术的不断进步,吊扇正朝着智能化、高效化、低噪化的方向发展。那么接下来小编将结合目前市面上的指标,详细为大家讲解其利天下有限公司推出的无刷吊扇驱动方案。▲其利天下无刷吊扇驱动方案一
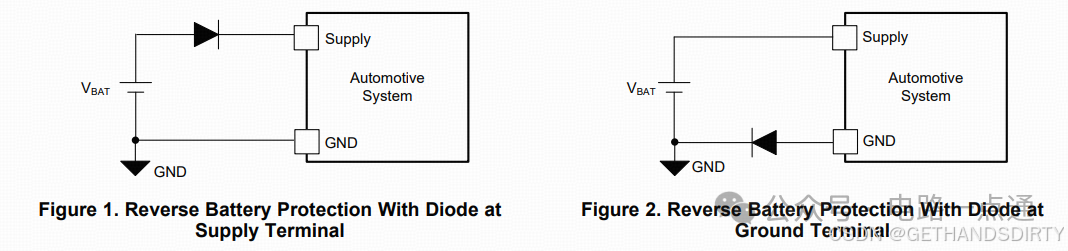
电源入口处防反接电路-汽车电子硬件电路设计
一、为什么要设计防反接电路电源入口处接线及线束制作一般人为操作,有正极和负极接反的可能性,可能会损坏电源和负载电路;汽车电子产品电性能测试标准ISO16750-2的4.7节包含了电压极性反接测试,汽车电子产品须通过该项测试。二、防反接电路设计1.基础版:二极管串联二极管是最简单的防反接电路,因为电源有电源路径(即正极)和返回路径(即负极,GND),那么用二极
半导体芯片需要做哪些测试
首先我们需要了解芯片制造环节做⼀款芯片最基本的环节是设计->流片->封装->测试,芯片成本构成⼀般为人力成本20%,流片40%,封装35%,测试5%(对于先进工艺,流片成本可能超过60%)。测试其实是芯片各个环节中最“便宜”的一步,在这个每家公司都喊着“CostDown”的激烈市场中,人力成本逐年攀升,晶圆厂和封装厂都在乙方市场中“叱咤风云”,唯独只有测试显

解决方案 | 芯佰微赋能示波器:高速ADC、USB控制器和RS232芯片——高性能示波器的秘密武器!
示波器解决方案总述:示波器是电子技术领域中不可或缺的精密测量仪器,通过直观的波形显示,将电信号随时间的变化转化为可视化图形,使复杂的电子现象变得清晰易懂。无论是在科研探索、工业检测还是通信领域,示波器都发挥着不可替代的作用,帮助工程师和技术人员深入剖析电信号的细节,精准定位问题所在,为创新与发展提供坚实的技术支撑。一、技术瓶颈亟待突破性能指标受限:受模拟前端
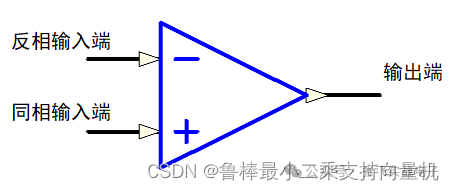
硬件设计基础----运算放大器
1什么是运算放大器运算放大器(运放)用于调节和放大模拟信号,运放是一个内含多级放大电路的集成器件,如图所示:左图为同相位,Vn端接地或稳定的电平,Vp端电平上升,则输出端Vo电平上升,Vp端电平下降,则输出端Vo电平下降;右图为反相位,Vp端接地或稳定的电平,Vn端电平上升,则输出端Vo电平下降,Vn端电平下降,则输出端Vo电平上升2运算放大器的性质理想运算

ElfBoard技术贴|如何调整eMMC存储分区
ELF 2开发板基于瑞芯微RK3588高性能处理器设计,拥有四核ARM Cortex-A76与四核ARM Cortex-A55的CPU架构,主频高达2.4GHz,内置6TOPS算力的NPU,这一设计让它能够轻松驾驭多种深度学习框架,高效处理各类复杂的AI任务。





 工商网监
工商网监
评论